 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNüwa: Mending the Spatial Integrity Torn by VLM Token Pruning
Feb 03, 2026Vision token pruning has proven to be an effective acceleration technique for the efficient Vision Language Model (VLM). However, existing pruning methods demonstrate excellent performance preservation in visual question answering (VQA) and suffer substantial degradation on visual grounding (VG) tasks. Our analysis of the VLM's processing pipeline reveals that strategies utilizing global semantic similarity and attention scores lose the global spatial reference frame, which is derived from the interactions of tokens' positional information. Motivated by these findings, we propose $\text{Nüwa}$, a two-stage token pruning framework that enables efficient feature aggregation while maintaining spatial integrity. In the first stage, after the vision encoder, we apply three operations, namely separation, alignment, and aggregation, which are inspired by swarm intelligence algorithms to retain information-rich global spatial anchors. In the second stage, within the LLM, we perform text-guided pruning to retain task-relevant visual tokens. Extensive experiments demonstrate that $\text{Nüwa}$ achieves SOTA performance on multiple VQA benchmarks (from 94% to 95%) and yields substantial improvements on visual grounding tasks (from 7% to 47%).
StyMam: A Mamba-Based Generator for Artistic Style Transfer
Jan 19, 2026Image style transfer aims to integrate the visual patterns of a specific artistic style into a content image while preserving its content structure. Existing methods mainly rely on the generative adversarial network (GAN) or stable diffusion (SD). GAN-based approaches using CNNs or Transformers struggle to jointly capture local and global dependencies, leading to artifacts and disharmonious patterns. SD-based methods reduce such issues but often fail to preserve content structures and suffer from slow inference. To address these issues, we revisit GAN and propose a mamba-based generator, termed as StyMam, to produce high-quality stylized images without introducing artifacts and disharmonious patterns. Specifically, we introduce a mamba-based generator with a residual dual-path strip scanning mechanism and a channel-reweighted spatial attention module. The former efficiently captures local texture features, while the latter models global dependencies. Finally, extensive qualitative and quantitative experiments demonstrate that the proposed method outperforms state-of-the-art algorithms in both quality and speed.
Medical SAM3: A Foundation Model for Universal Prompt-Driven Medical Image Segmentation
Jan 15, 2026Promptable segmentation foundation models such as SAM3 have demonstrated strong generalization capabilities through interactive and concept-based prompting. However, their direct applicability to medical image segmentation remains limited by severe domain shifts, the absence of privileged spatial prompts, and the need to reason over complex anatomical and volumetric structures. Here we present Medical SAM3, a foundation model for universal prompt-driven medical image segmentation, obtained by fully fine-tuning SAM3 on large-scale, heterogeneous 2D and 3D medical imaging datasets with paired segmentation masks and text prompts. Through a systematic analysis of vanilla SAM3, we observe that its performance degrades substantially on medical data, with its apparent competitiveness largely relying on strong geometric priors such as ground-truth-derived bounding boxes. These findings motivate full model adaptation beyond prompt engineering alone. By fine-tuning SAM3's model parameters on 33 datasets spanning 10 medical imaging modalities, Medical SAM3 acquires robust domain-specific representations while preserving prompt-driven flexibility. Extensive experiments across organs, imaging modalities, and dimensionalities demonstrate consistent and significant performance gains, particularly in challenging scenarios characterized by semantic ambiguity, complex morphology, and long-range 3D context. Our results establish Medical SAM3 as a universal, text-guided segmentation foundation model for medical imaging and highlight the importance of holistic model adaptation for achieving robust prompt-driven segmentation under severe domain shift. Code and model will be made available at https://github.com/AIM-Research-Lab/Medical-SAM3.
MoFu: Scale-Aware Modulation and Fourier Fusion for Multi-Subject Video Generation
Dec 26, 2025Multi-subject video generation aims to synthesize videos from textual prompts and multiple reference images, ensuring that each subject preserves natural scale and visual fidelity. However, current methods face two challenges: scale inconsistency, where variations in subject size lead to unnatural generation, and permutation sensitivity, where the order of reference inputs causes subject distortion. In this paper, we propose MoFu, a unified framework that tackles both challenges. For scale inconsistency, we introduce Scale-Aware Modulation (SMO), an LLM-guided module that extracts implicit scale cues from the prompt and modulates features to ensure consistent subject sizes. To address permutation sensitivity, we present a simple yet effective Fourier Fusion strategy that processes the frequency information of reference features via the Fast Fourier Transform to produce a unified representation. Besides, we design a Scale-Permutation Stability Loss to jointly encourage scale-consistent and permutation-invariant generation. To further evaluate these challenges, we establish a dedicated benchmark with controlled variations in subject scale and reference permutation. Extensive experiments demonstrate that MoFu significantly outperforms existing methods in preserving natural scale, subject fidelity, and overall visual quality.
CurriFlow: Curriculum-Guided Depth Fusion with Optical Flow-Based Temporal Alignment for 3D Semantic Scene Completion
Oct 14, 2025Semantic Scene Completion (SSC) aims to infer complete 3D geometry and semantics from monocular images, serving as a crucial capability for camera-based perception in autonomous driving. However, existing SSC methods relying on temporal stacking or depth projection often lack explicit motion reasoning and struggle with occlusions and noisy depth supervision. We propose CurriFlow, a novel semantic occupancy prediction framework that integrates optical flow-based temporal alignment with curriculum-guided depth fusion. CurriFlow employs a multi-level fusion strategy to align segmentation, visual, and depth features across frames using pre-trained optical flow, thereby improving temporal consistency and dynamic object understanding. To enhance geometric robustness, a curriculum learning mechanism progressively transitions from sparse yet accurate LiDAR depth to dense but noisy stereo depth during training, ensuring stable optimization and seamless adaptation to real-world deployment. Furthermore, semantic priors from the Segment Anything Model (SAM) provide category-agnostic supervision, strengthening voxel-level semantic learning and spatial consistency. Experiments on the SemanticKITTI benchmark demonstrate that CurriFlow achieves state-of-the-art performance with a mean IoU of 16.9, validating the effectiveness of our motion-guided and curriculum-aware design for camera-based 3D semantic scene completion.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
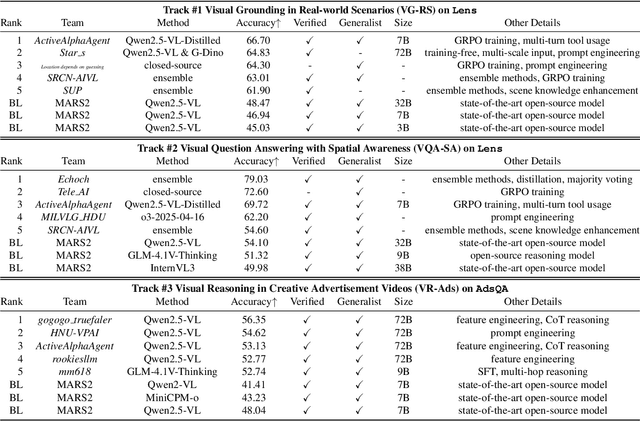

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
AdsQA: Towards Advertisement Video Understanding
Sep 10, 2025Large language models (LLMs) have taken a great step towards AGI. Meanwhile, an increasing number of domain-specific problems such as math and programming boost these general-purpose models to continuously evolve via learning deeper expertise. Now is thus the time further to extend the diversity of specialized applications for knowledgeable LLMs, though collecting high quality data with unexpected and informative tasks is challenging. In this paper, we propose to use advertisement (ad) videos as a challenging test-bed to probe the ability of LLMs in perceiving beyond the objective physical content of common visual domain. Our motivation is to take full advantage of the clue-rich and information-dense ad videos' traits, e.g., marketing logic, persuasive strategies, and audience engagement. Our contribution is three-fold: (1) To our knowledge, this is the first attempt to use ad videos with well-designed tasks to evaluate LLMs. We contribute AdsQA, a challenging ad Video QA benchmark derived from 1,544 ad videos with 10,962 clips, totaling 22.7 hours, providing 5 challenging tasks. (2) We propose ReAd-R, a Deepseek-R1 styled RL model that reflects on questions, and generates answers via reward-driven optimization. (3) We benchmark 14 top-tier LLMs on AdsQA, and our \texttt{ReAd-R}~achieves the state-of-the-art outperforming strong competitors equipped with long-chain reasoning capabilities by a clear margin.
ICM-Fusion: In-Context Meta-Optimized LoRA Fusion for Multi-Task Adaptation
Aug 06, 2025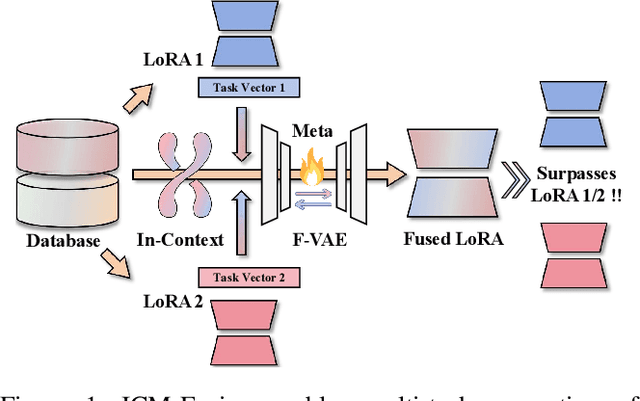
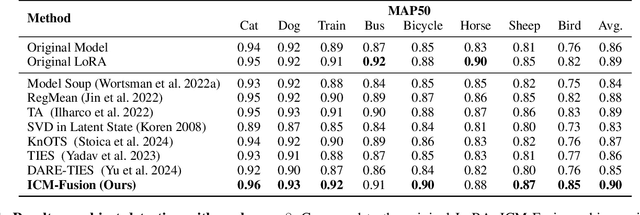
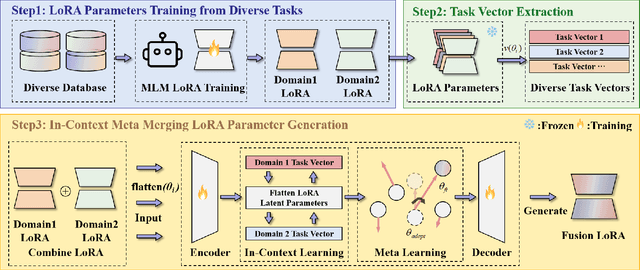
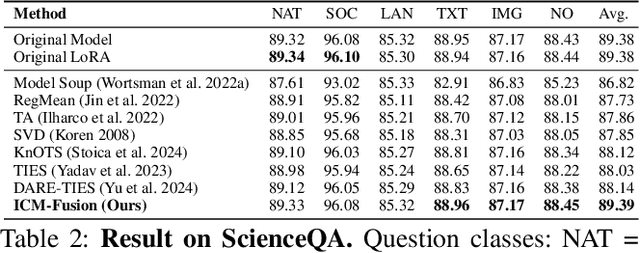
Enabling multi-task adaptation in pre-trained Low-Rank Adaptation (LoRA) models is crucial for enhancing their generalization capabilities. Most existing pre-trained LoRA fusion methods decompose weight matrices, sharing similar parameters while merging divergent ones. However, this paradigm inevitably induces inter-weight conflicts and leads to catastrophic domain forgetting. While incremental learning enables adaptation to multiple tasks, it struggles to achieve generalization in few-shot scenarios. Consequently, when the weight data follows a long-tailed distribution, it can lead to forgetting in the fused weights. To address this issue, we propose In-Context Meta LoRA Fusion (ICM-Fusion), a novel framework that synergizes meta-learning with in-context adaptation. The key innovation lies in our task vector arithmetic, which dynamically balances conflicting optimization directions across domains through learned manifold projections. ICM-Fusion obtains the optimal task vector orientation for the fused model in the latent space by adjusting the orientation of the task vectors. Subsequently, the fused LoRA is reconstructed by a self-designed Fusion VAE (F-VAE) to realize multi-task LoRA generation. We have conducted extensive experiments on visual and linguistic tasks, and the experimental results demonstrate that ICM-Fusion can be adapted to a wide range of architectural models and applied to various tasks. Compared to the current pre-trained LoRA fusion method, ICM-Fusion fused LoRA can significantly reduce the multi-tasking loss and can even achieve task enhancement in few-shot scenarios.
EventVAD: Training-Free Event-Aware Video Anomaly Detection
Apr 17, 2025Video Anomaly Detection~(VAD) focuses on identifying anomalies within videos. Supervised methods require an amount of in-domain training data and often struggle to generalize to unseen anomalies. In contrast, training-free methods leverage the intrinsic world knowledge of large language models (LLMs) to detect anomalies but face challenges in localizing fine-grained visual transitions and diverse events. Therefore, we propose EventVAD, an event-aware video anomaly detection framework that combines tailored dynamic graph architectures and multimodal LLMs through temporal-event reasoning. Specifically, EventVAD first employs dynamic spatiotemporal graph modeling with time-decay constraints to capture event-aware video features. Then, it performs adaptive noise filtering and uses signal ratio thresholding to detect event boundaries via unsupervised statistical features. The statistical boundary detection module reduces the complexity of processing long videos for MLLMs and improves their temporal reasoning through event consistency. Finally, it utilizes a hierarchical prompting strategy to guide MLLMs in performing reasoning before determining final decisions. We conducted extensive experiments on the UCF-Crime and XD-Violence datasets. The results demonstrate that EventVAD with a 7B MLLM achieves state-of-the-art (SOTA) in training-free settings, outperforming strong baselines that use 7B or larger MLLMs.
MambaIC: State Space Models for High-Performance Learned Image Compression
Mar 16, 2025A high-performance image compression algorithm is crucial for real-time information transmission across numerous fields. Despite rapid progress in image compression, computational inefficiency and poor redundancy modeling still pose significant bottlenecks, limiting practical applications. Inspired by the effectiveness of state space models (SSMs) in capturing long-range dependencies, we leverage SSMs to address computational inefficiency in existing methods and improve image compression from multiple perspectives. In this paper, we integrate the advantages of SSMs for better efficiency-performance trade-off and propose an enhanced image compression approach through refined context modeling, which we term MambaIC. Specifically, we explore context modeling to adaptively refine the representation of hidden states. Additionally, we introduce window-based local attention into channel-spatial entropy modeling to reduce potential spatial redundancy during compression, thereby increasing efficiency. Comprehensive qualitative and quantitative results validate the effectiveness and efficiency of our approach, particularly for high-resolution image compression. Code is released at https://github.com/AuroraZengfh/MambaIC.