 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVADER: Visual Affordance Detection and Error Recovery for Multi Robot Human Collaboration
May 25, 2024



Robots today can exploit the rich world knowledge of large language models to chain simple behavioral skills into long-horizon tasks. However, robots often get interrupted during long-horizon tasks due to primitive skill failures and dynamic environments. We propose VADER, a plan, execute, detect framework with seeking help as a new skill that enables robots to recover and complete long-horizon tasks with the help of humans or other robots. VADER leverages visual question answering (VQA) modules to detect visual affordances and recognize execution errors. It then generates prompts for a language model planner (LMP) which decides when to seek help from another robot or human to recover from errors in long-horizon task execution. We show the effectiveness of VADER with two long-horizon robotic tasks. Our pilot study showed that VADER is capable of performing complex long-horizon tasks by asking for help from another robot to clear a table. Our user study showed that VADER is capable of performing complex long-horizon tasks by asking for help from a human to clear a path. We gathered feedback from people (N=19) about the performance of the VADER performance vs. a robot that did not ask for help. https://google-vader.github.io/
Blocks Assemble! Learning to Assemble with Large-Scale Structured Reinforcement Learning
Apr 12, 2022
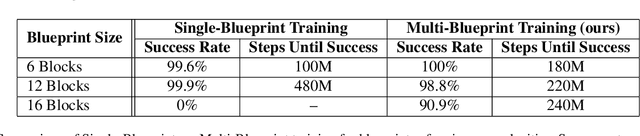
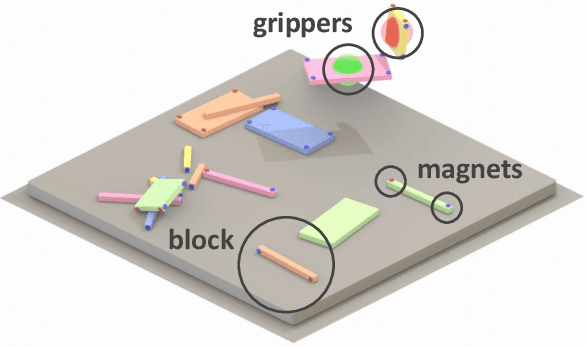

Assembly of multi-part physical structures is both a valuable end product for autonomous robotics, as well as a valuable diagnostic task for open-ended training of embodied intelligent agents. We introduce a naturalistic physics-based environment with a set of connectable magnet blocks inspired by children's toy kits. The objective is to assemble blocks into a succession of target blueprints. Despite the simplicity of this objective, the compositional nature of building diverse blueprints from a set of blocks leads to an explosion of complexity in structures that agents encounter. Furthermore, assembly stresses agents' multi-step planning, physical reasoning, and bimanual coordination. We find that the combination of large-scale reinforcement learning and graph-based policies -- surprisingly without any additional complexity -- is an effective recipe for training agents that not only generalize to complex unseen blueprints in a zero-shot manner, but even operate in a reset-free setting without being trained to do so. Through extensive experiments, we highlight the importance of large-scale training, structured representations, contributions of multi-task vs. single-task learning, as well as the effects of curriculums, and discuss qualitative behaviors of trained agents.
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Apr 04, 2022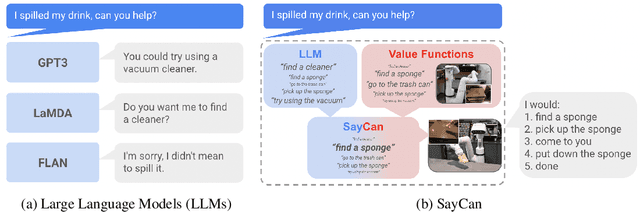
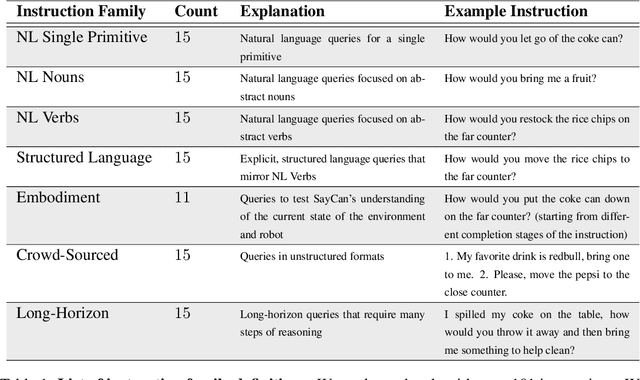
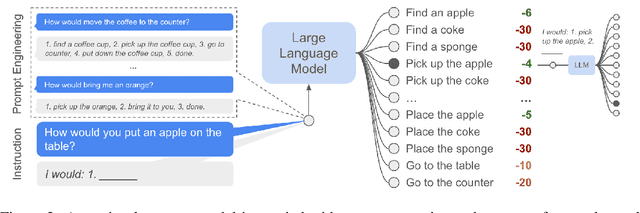
Large language models can encode a wealth of semantic knowledge about the world. Such knowledge could be extremely useful to robots aiming to act upon high-level, temporally extended instructions expressed in natural language. However, a significant weakness of language models is that they lack real-world experience, which makes it difficult to leverage them for decision making within a given embodiment. For example, asking a language model to describe how to clean a spill might result in a reasonable narrative, but it may not be applicable to a particular agent, such as a robot, that needs to perform this task in a particular environment. We propose to provide real-world grounding by means of pretrained skills, which are used to constrain the model to propose natural language actions that are both feasible and contextually appropriate. The robot can act as the language model's "hands and eyes," while the language model supplies high-level semantic knowledge about the task. We show how low-level skills can be combined with large language models so that the language model provides high-level knowledge about the procedures for performing complex and temporally-extended instructions, while value functions associated with these skills provide the grounding necessary to connect this knowledge to a particular physical environment. We evaluate our method on a number of real-world robotic tasks, where we show the need for real-world grounding and that this approach is capable of completing long-horizon, abstract, natural language instructions on a mobile manipulator. The project's website and the video can be found at https://say-can.github.io/
Braxlines: Fast and Interactive Toolkit for RL-driven Behavior Engineering beyond Reward Maximization
Oct 10, 2021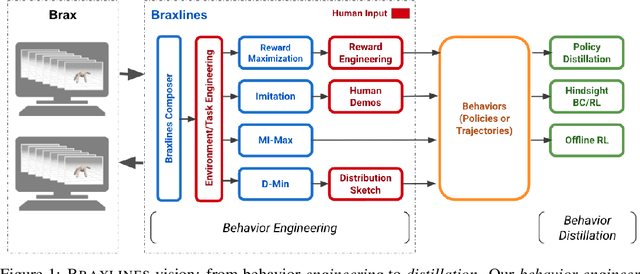


The goal of continuous control is to synthesize desired behaviors. In reinforcement learning (RL)-driven approaches, this is often accomplished through careful task reward engineering for efficient exploration and running an off-the-shelf RL algorithm. While reward maximization is at the core of RL, reward engineering is not the only -- sometimes nor the easiest -- way for specifying complex behaviors. In this paper, we introduce \braxlines, a toolkit for fast and interactive RL-driven behavior generation beyond simple reward maximization that includes Composer, a programmatic API for generating continuous control environments, and set of stable and well-tested baselines for two families of algorithms -- mutual information maximization (MiMax) and divergence minimization (DMin) -- supporting unsupervised skill learning and distribution sketching as other modes of behavior specification. In addition, we discuss how to standardize metrics for evaluating these algorithms, which can no longer rely on simple reward maximization. Our implementations build on a hardware-accelerated Brax simulator in Jax with minimal modifications, enabling behavior synthesis within minutes of training. We hope Braxlines can serve as an interactive toolkit for rapid creation and testing of environments and behaviors, empowering explosions of future benchmark designs and new modes of RL-driven behavior generation and their algorithmic research.