 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVADER: Visual Affordance Detection and Error Recovery for Multi Robot Human Collaboration
May 25, 2024



Robots today can exploit the rich world knowledge of large language models to chain simple behavioral skills into long-horizon tasks. However, robots often get interrupted during long-horizon tasks due to primitive skill failures and dynamic environments. We propose VADER, a plan, execute, detect framework with seeking help as a new skill that enables robots to recover and complete long-horizon tasks with the help of humans or other robots. VADER leverages visual question answering (VQA) modules to detect visual affordances and recognize execution errors. It then generates prompts for a language model planner (LMP) which decides when to seek help from another robot or human to recover from errors in long-horizon task execution. We show the effectiveness of VADER with two long-horizon robotic tasks. Our pilot study showed that VADER is capable of performing complex long-horizon tasks by asking for help from another robot to clear a table. Our user study showed that VADER is capable of performing complex long-horizon tasks by asking for help from a human to clear a path. We gathered feedback from people (N=19) about the performance of the VADER performance vs. a robot that did not ask for help. https://google-vader.github.io/
Vid2Robot: End-to-end Video-conditioned Policy Learning with Cross-Attention Transformers
Mar 19, 2024



While large-scale robotic systems typically rely on textual instructions for tasks, this work explores a different approach: can robots infer the task directly from observing humans? This shift necessitates the robot's ability to decode human intent and translate it into executable actions within its physical constraints and environment. We introduce Vid2Robot, a novel end-to-end video-based learning framework for robots. Given a video demonstration of a manipulation task and current visual observations, Vid2Robot directly produces robot actions. This is achieved through a unified representation model trained on a large dataset of human video and robot trajectory. The model leverages cross-attention mechanisms to fuse prompt video features to the robot's current state and generate appropriate actions that mimic the observed task. To further improve policy performance, we propose auxiliary contrastive losses that enhance the alignment between human and robot video representations. We evaluate Vid2Robot on real-world robots, demonstrating a 20% improvement in performance compared to other video-conditioned policies when using human demonstration videos. Additionally, our model exhibits emergent capabilities, such as successfully transferring observed motions from one object to another, and long-horizon composition, thus showcasing its potential for real-world applications. Project website: vid2robot.github.io
RoboVQA: Multimodal Long-Horizon Reasoning for Robotics
Nov 01, 2023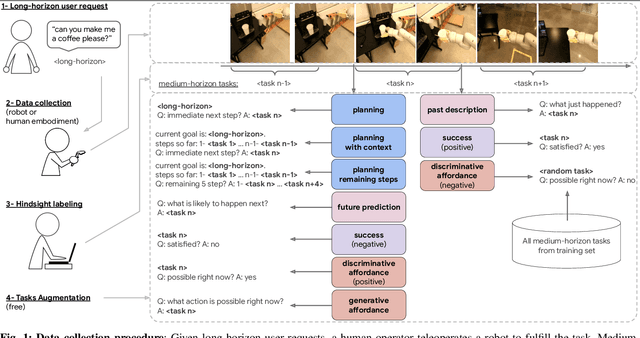

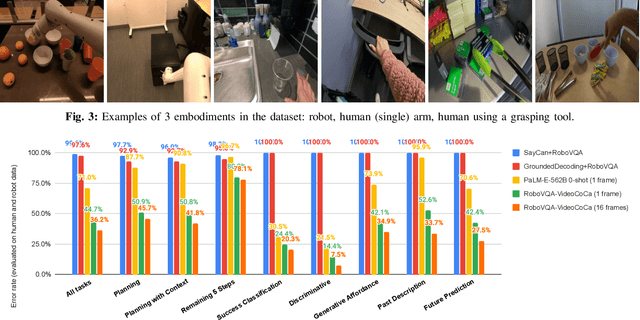
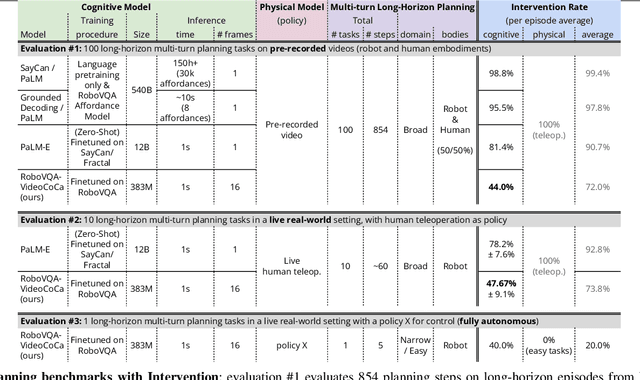
We present a scalable, bottom-up and intrinsically diverse data collection scheme that can be used for high-level reasoning with long and medium horizons and that has 2.2x higher throughput compared to traditional narrow top-down step-by-step collection. We collect realistic data by performing any user requests within the entirety of 3 office buildings and using multiple robot and human embodiments. With this data, we show that models trained on all embodiments perform better than ones trained on the robot data only, even when evaluated solely on robot episodes. We find that for a fixed collection budget it is beneficial to take advantage of cheaper human collection along with robot collection. We release a large and highly diverse (29,520 unique instructions) dataset dubbed RoboVQA containing 829,502 (video, text) pairs for robotics-focused visual question answering. We also demonstrate how evaluating real robot experiments with an intervention mechanism enables performing tasks to completion, making it deployable with human oversight even if imperfect while also providing a single performance metric. We demonstrate a single video-conditioned model named RoboVQA-VideoCoCa trained on our dataset that is capable of performing a variety of grounded high-level reasoning tasks in broad realistic settings with a cognitive intervention rate 46% lower than the zero-shot state of the art visual language model (VLM) baseline and is able to guide real robots through long-horizon tasks. The performance gap with zero-shot state-of-the-art models indicates that a lot of grounded data remains to be collected for real-world deployment, emphasizing the critical need for scalable data collection approaches. Finally, we show that video VLMs significantly outperform single-image VLMs with an average error rate reduction of 19% across all VQA tasks. Data and videos available at https://robovqa.github.io
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022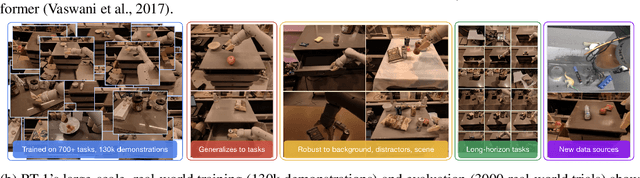
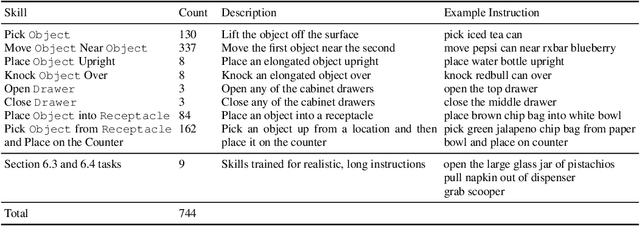
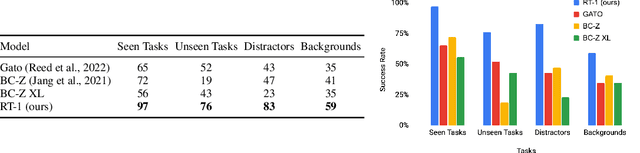
By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Apr 04, 2022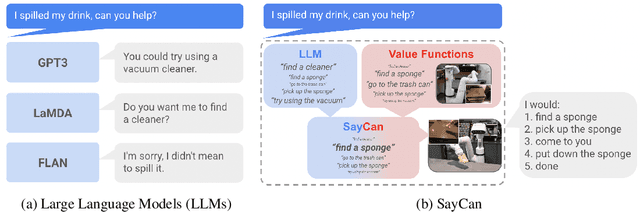
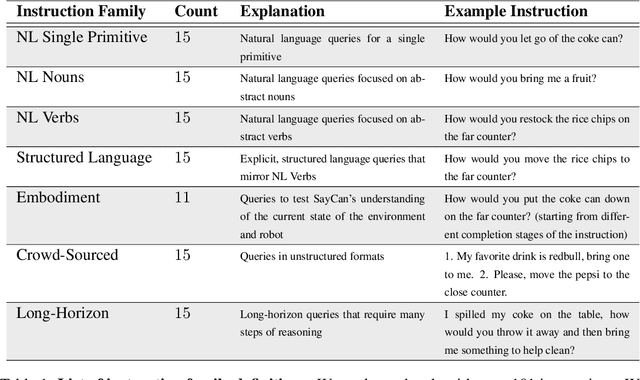
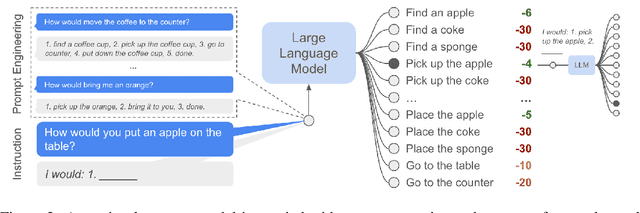
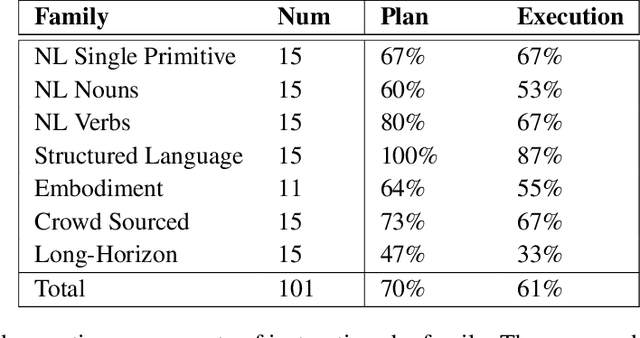
Large language models can encode a wealth of semantic knowledge about the world. Such knowledge could be extremely useful to robots aiming to act upon high-level, temporally extended instructions expressed in natural language. However, a significant weakness of language models is that they lack real-world experience, which makes it difficult to leverage them for decision making within a given embodiment. For example, asking a language model to describe how to clean a spill might result in a reasonable narrative, but it may not be applicable to a particular agent, such as a robot, that needs to perform this task in a particular environment. We propose to provide real-world grounding by means of pretrained skills, which are used to constrain the model to propose natural language actions that are both feasible and contextually appropriate. The robot can act as the language model's "hands and eyes," while the language model supplies high-level semantic knowledge about the task. We show how low-level skills can be combined with large language models so that the language model provides high-level knowledge about the procedures for performing complex and temporally-extended instructions, while value functions associated with these skills provide the grounding necessary to connect this knowledge to a particular physical environment. We evaluate our method on a number of real-world robotic tasks, where we show the need for real-world grounding and that this approach is capable of completing long-horizon, abstract, natural language instructions on a mobile manipulator. The project's website and the video can be found at https://say-can.github.io/