 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlphaStar Unplugged: Large-Scale Offline Reinforcement Learning
Aug 07, 2023



StarCraft II is one of the most challenging simulated reinforcement learning environments; it is partially observable, stochastic, multi-agent, and mastering StarCraft II requires strategic planning over long time horizons with real-time low-level execution. It also has an active professional competitive scene. StarCraft II is uniquely suited for advancing offline RL algorithms, both because of its challenging nature and because Blizzard has released a massive dataset of millions of StarCraft II games played by human players. This paper leverages that and establishes a benchmark, called AlphaStar Unplugged, introducing unprecedented challenges for offline reinforcement learning. We define a dataset (a subset of Blizzard's release), tools standardizing an API for machine learning methods, and an evaluation protocol. We also present baseline agents, including behavior cloning, offline variants of actor-critic and MuZero. We improve the state of the art of agents using only offline data, and we achieve 90% win rate against previously published AlphaStar behavior cloning agent.
RoboCat: A Self-Improving Foundation Agent for Robotic Manipulation
Jun 20, 2023



The ability to leverage heterogeneous robotic experience from different robots and tasks to quickly master novel skills and embodiments has the potential to transform robot learning. Inspired by recent advances in foundation models for vision and language, we propose a foundation agent for robotic manipulation. This agent, named RoboCat, is a visual goal-conditioned decision transformer capable of consuming multi-embodiment action-labelled visual experience. This data spans a large repertoire of motor control skills from simulated and real robotic arms with varying sets of observations and actions. With RoboCat, we demonstrate the ability to generalise to new tasks and robots, both zero-shot as well as through adaptation using only 100--1000 examples for the target task. We also show how a trained model itself can be used to generate data for subsequent training iterations, thus providing a basic building block for an autonomous improvement loop. We investigate the agent's capabilities, with large-scale evaluations both in simulation and on three different real robot embodiments. We find that as we grow and diversify its training data, RoboCat not only shows signs of cross-task transfer, but also becomes more efficient at adapting to new tasks.
Critic Regularized Regression
Jun 26, 2020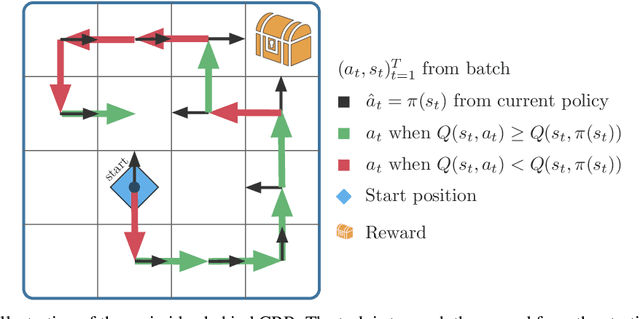

Offline reinforcement learning (RL), also known as batch RL, offers the prospect of policy optimization from large pre-recorded datasets without online environment interaction. It addresses challenges with regard to the cost of data collection and safety, both of which are particularly pertinent to real-world applications of RL. Unfortunately, most off-policy algorithms perform poorly when learning from a fixed dataset. In this paper, we propose a novel offline RL algorithm to learn policies from data using a form of critic-regularized regression (CRR). We find that CRR performs surprisingly well and scales to tasks with high-dimensional state and action spaces -- outperforming several state-of-the-art offline RL algorithms by a significant margin on a wide range of benchmark tasks.
A Framework for Data-Driven Robotics
Sep 26, 2019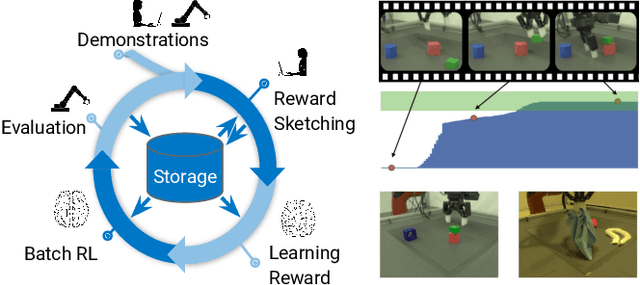
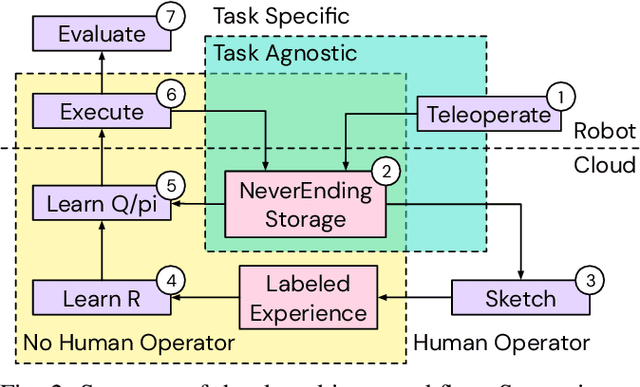
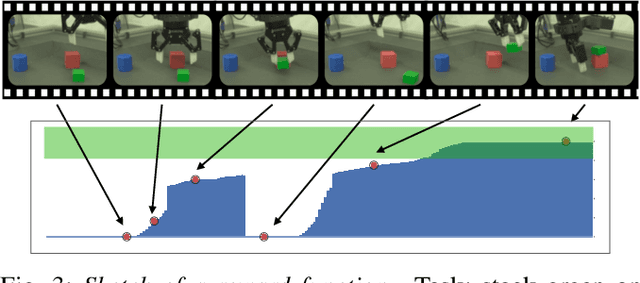
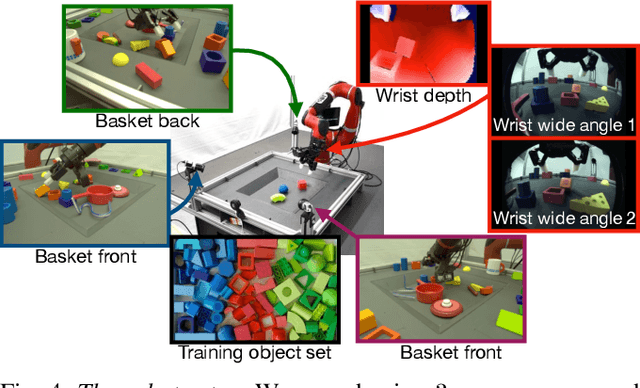
We present a framework for data-driven robotics that makes use of a large dataset of recorded robot experience and scales to several tasks using learned reward functions. We show how to apply this framework to accomplish three different object manipulation tasks on a real robot platform. Given demonstrations of a task together with task-agnostic recorded experience, we use a special form of human annotation as supervision to learn a reward function, which enables us to deal with real-world tasks where the reward signal cannot be acquired directly. Learned rewards are used in combination with a large dataset of experience from different tasks to learn a robot policy offline using batch RL. We show that using our approach it is possible to train agents to perform a variety of challenging manipulation tasks including stacking rigid objects and handling cloth.
Split Batch Normalization: Improving Semi-Supervised Learning under Domain Shift
Apr 06, 2019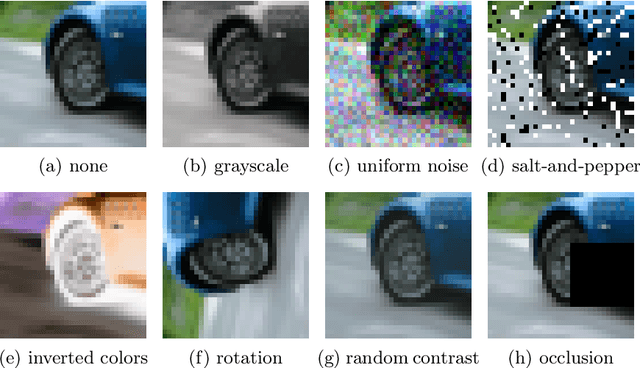
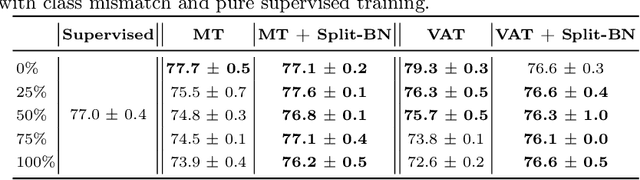
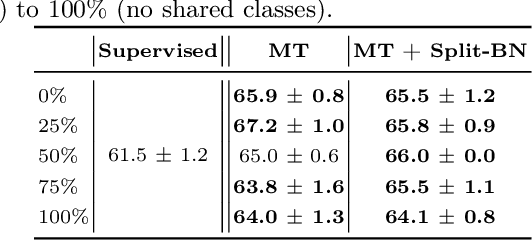
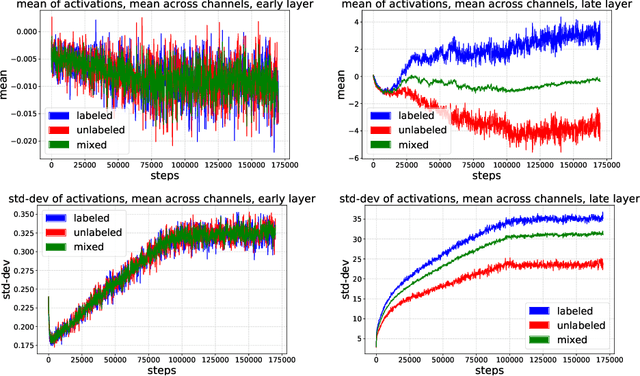
Recent work has shown that using unlabeled data in semi-supervised learning is not always beneficial and can even hurt generalization, especially when there is a class mismatch between the unlabeled and labeled examples. We investigate this phenomenon for image classification on the CIFAR-10 and the ImageNet datasets, and with many other forms of domain shifts applied (e.g. salt-and-pepper noise). Our main contribution is Split Batch Normalization (Split-BN), a technique to improve SSL when the additional unlabeled data comes from a shifted distribution. We achieve it by using separate batch normalization statistics for unlabeled examples. Due to its simplicity, we recommend it as a standard practice. Finally, we analyse how domain shift affects the SSL training process. In particular, we find that during training the statistics of hidden activations in late layers become markedly different between the unlabeled and the labeled examples.
Adversarial Framing for Image and Video Classification
Dec 11, 2018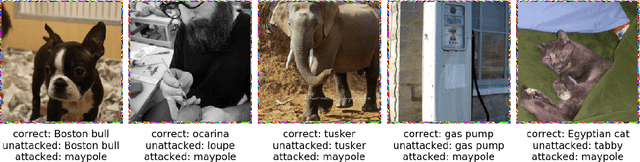
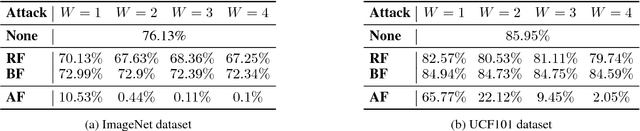

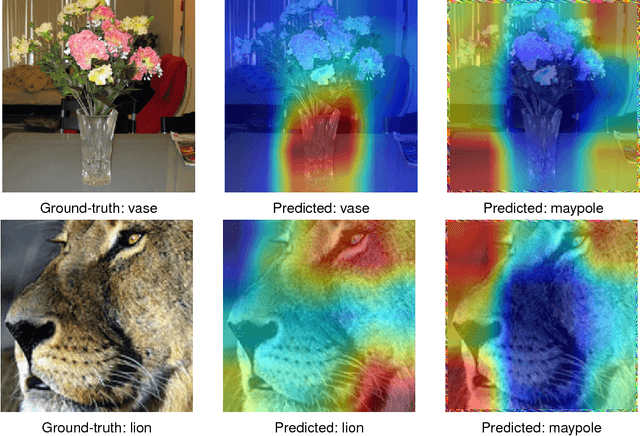
Neural networks are prone to adversarial attacks. In general, such attacks deteriorate the quality of the input by either slightly modifying most of its pixels, or by occluding it with a patch. In this paper, we propose a method that keeps the image unchanged and only adds an adversarial framing on the border of the image. We show empirically that our method is able to successfully attack state-of-the-art methods on both image and video classification problems. Notably, the proposed method results in a universal attack which is very fast at test time. Source code can be found at https://github.com/zajaczajac/adv_framing .