 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Pick-and-Place: Tackling Robotic Stacking of Diverse Shapes
Nov 03, 2021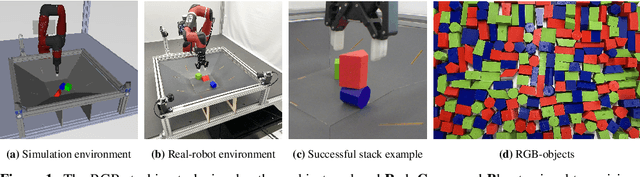
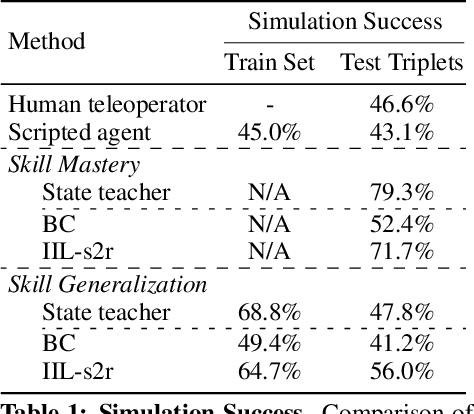
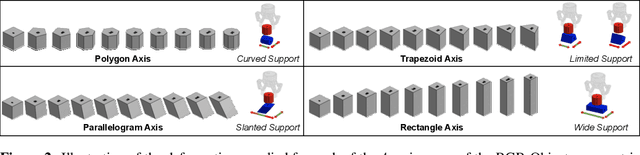
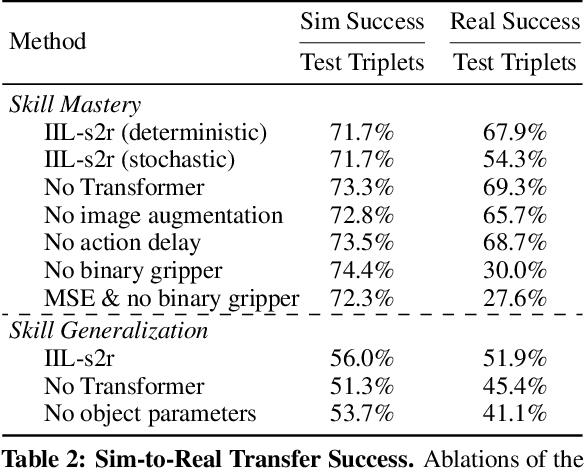
We study the problem of robotic stacking with objects of complex geometry. We propose a challenging and diverse set of such objects that was carefully designed to require strategies beyond a simple "pick-and-place" solution. Our method is a reinforcement learning (RL) approach combined with vision-based interactive policy distillation and simulation-to-reality transfer. Our learned policies can efficiently handle multiple object combinations in the real world and exhibit a large variety of stacking skills. In a large experimental study, we investigate what choices matter for learning such general vision-based agents in simulation, and what affects optimal transfer to the real robot. We then leverage data collected by such policies and improve upon them with offline RL. A video and a blog post of our work are provided as supplementary material.
"What, not how": Solving an under-actuated insertion task from scratch
Oct 30, 2020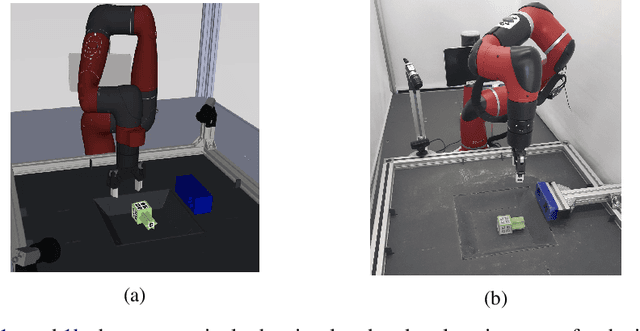
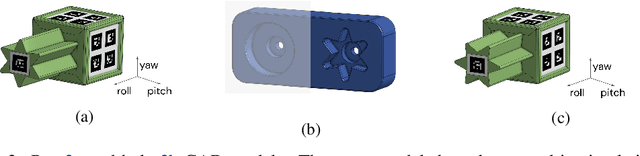
Robot manipulation requires a complex set of skills that need to be carefully combined and coordinated to solve a task. Yet, most ReinforcementLearning (RL) approaches in robotics study tasks which actually consist only of a single manipulation skill, such as grasping an object or inserting a pre-grasped object. As a result the skill ('how' to solve the task) but not the actual goal of a complete manipulation ('what' to solve) is specified. In contrast, we study a complex manipulation goal that requires an agent to learn and combine diverse manipulation skills. We propose a challenging, highly under-actuated peg-in-hole task with a free, rotational asymmetrical peg, requiring a broad range of manipulation skills. While correct peg (re-)orientation is a requirement for successful insertion, there is no reward associated with it. Hence an agent needs to understand this pre-condition and learn the skill to fulfil it. The final insertion reward is sparse, allowing freedom in the solution and leading to complex emerging behaviour not envisioned during the task design. We tackle the problem in a multi-task RL framework using Scheduled Auxiliary Control (SAC-X) combined with Regularized Hierarchical Policy Optimization (RHPO) which successfully solves the task in simulation and from scratch on a single robot where data is severely limited.
Robust Constrained Reinforcement Learning for Continuous Control with Model Misspecification
Oct 20, 2020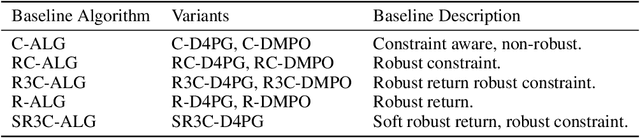
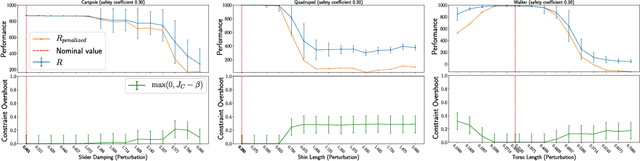
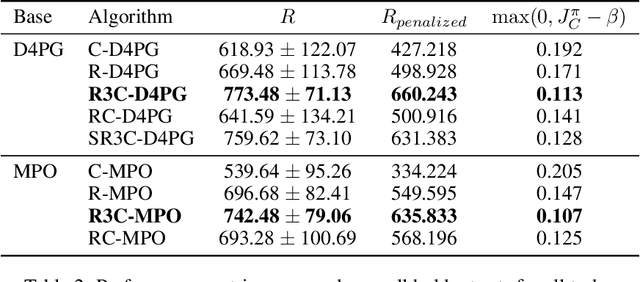
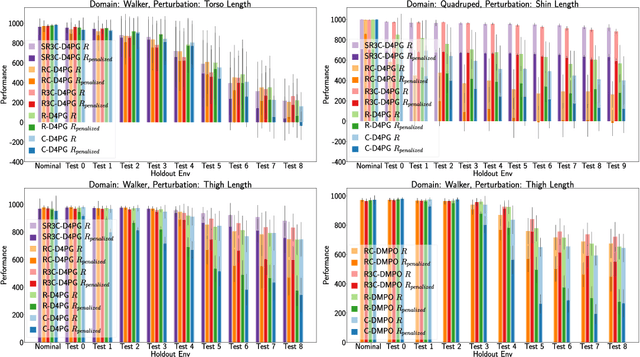
Many real-world physical control systems are required to satisfy constraints upon deployment. Furthermore, real-world systems are often subject to effects such as non-stationarity, wear-and-tear, uncalibrated sensors and so on. Such effects effectively perturb the system dynamics and can cause a policy trained successfully in one domain to perform poorly when deployed to a perturbed version of the same domain. This can affect a policy's ability to maximize future rewards as well as the extent to which it satisfies constraints. We refer to this as constrained model misspecification. We present an algorithm with theoretical guarantees that mitigates this form of misspecification, and showcase its performance in multiple Mujoco tasks from the Real World Reinforcement Learning (RWRL) suite.
Learning Dexterous Manipulation from Suboptimal Experts
Oct 16, 2020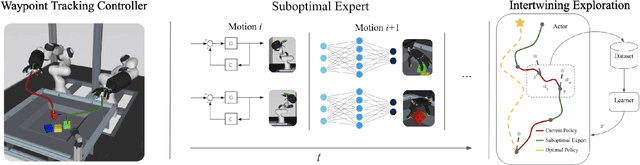
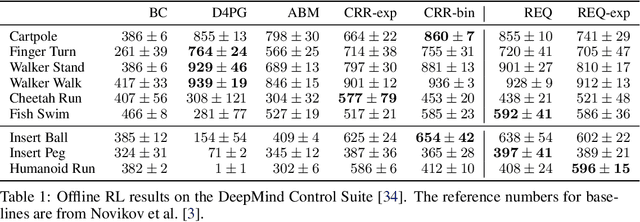
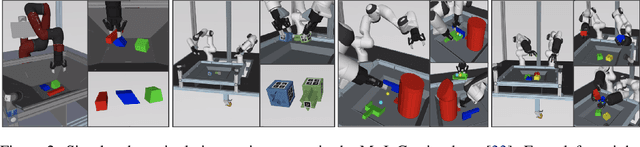
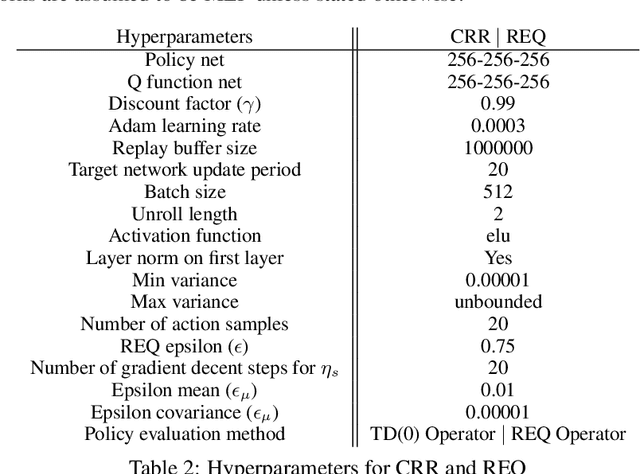
Learning dexterous manipulation in high-dimensional state-action spaces is an important open challenge with exploration presenting a major bottleneck. Although in many cases the learning process could be guided by demonstrations or other suboptimal experts, current RL algorithms for continuous action spaces often fail to effectively utilize combinations of highly off-policy expert data and on-policy exploration data. As a solution, we introduce Relative Entropy Q-Learning (REQ), a simple policy iteration algorithm that combines ideas from successful offline and conventional RL algorithms. It represents the optimal policy via importance sampling from a learned prior and is well-suited to take advantage of mixed data distributions. We demonstrate experimentally that REQ outperforms several strong baselines on robotic manipulation tasks for which suboptimal experts are available. We show how suboptimal experts can be constructed effectively by composing simple waypoint tracking controllers, and we also show how learned primitives can be combined with waypoint controllers to obtain reference behaviors to bootstrap a complex manipulation task on a simulated bimanual robot with human-like hands. Finally, we show that REQ is also effective for general off-policy RL, offline RL, and RL from demonstrations. Videos and further materials are available at sites.google.com/view/rlfse.
Importance Weighted Policy Learning and Adaption
Sep 10, 2020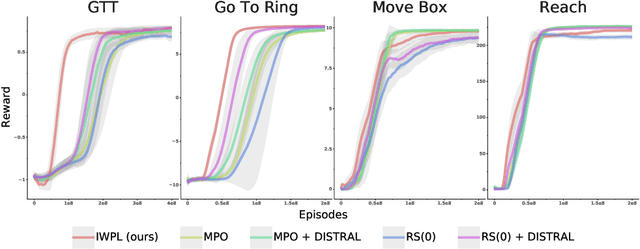
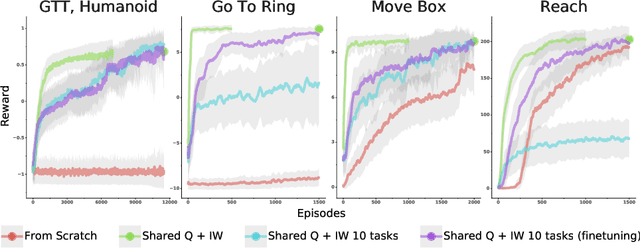
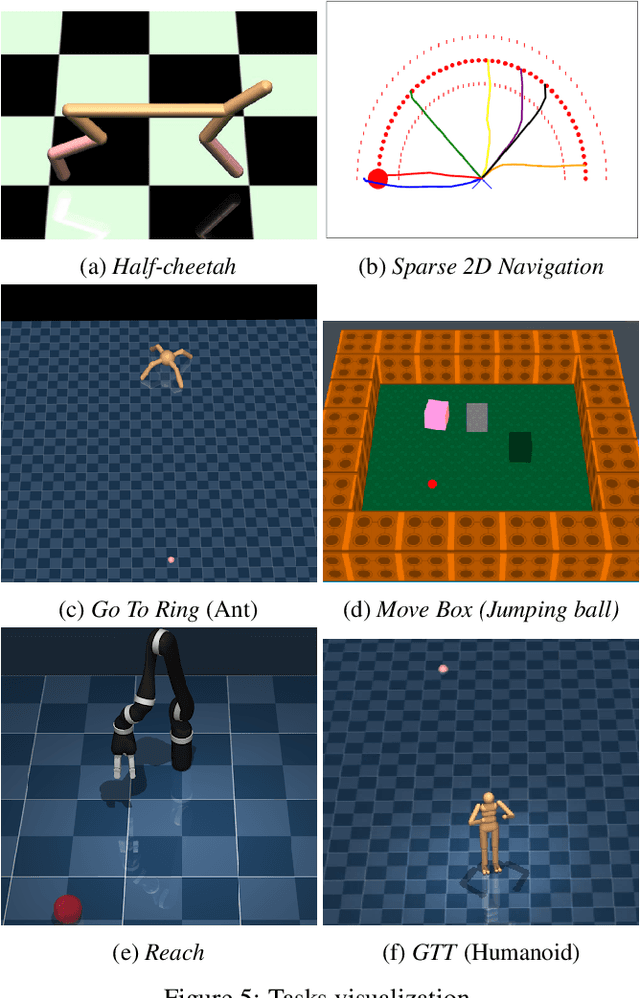
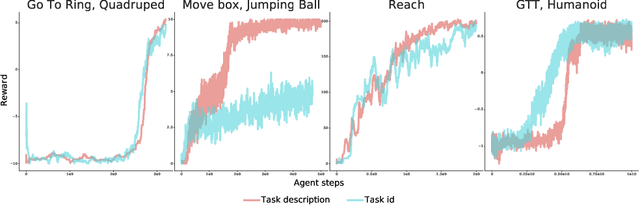
The ability to exploit prior experience to solve novel problems rapidly is a hallmark of biological learning systems and of great practical importance for artificial ones. In the meta reinforcement learning literature much recent work has focused on the problem of optimizing the learning process itself. In this paper we study a complementary approach which is conceptually simple, general, modular and built on top of recent improvements in off-policy learning. The framework is inspired by ideas from the probabilistic inference literature and combines robust off-policy learning with a behavior prior, or default behavior that constrains the space of solutions and serves as a bias for exploration; as well as a representation for the value function, both of which are easily learned from a number of training tasks in a multi-task scenario. Our approach achieves competitive adaptation performance on hold-out tasks compared to meta reinforcement learning baselines and can scale to complex sparse-reward scenarios.
Modelling Generalized Forces with Reinforcement Learning for Sim-to-Real Transfer
Oct 21, 2019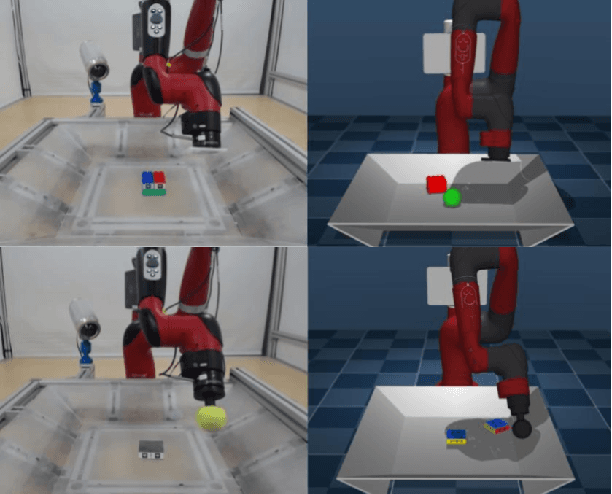
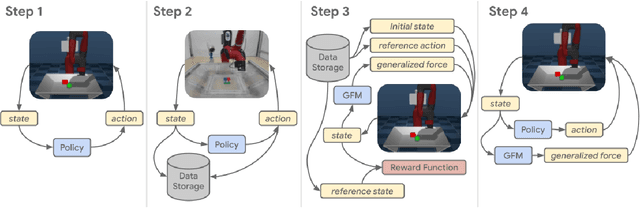
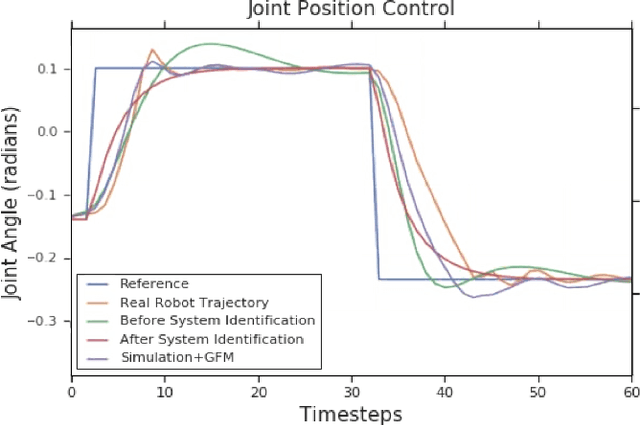
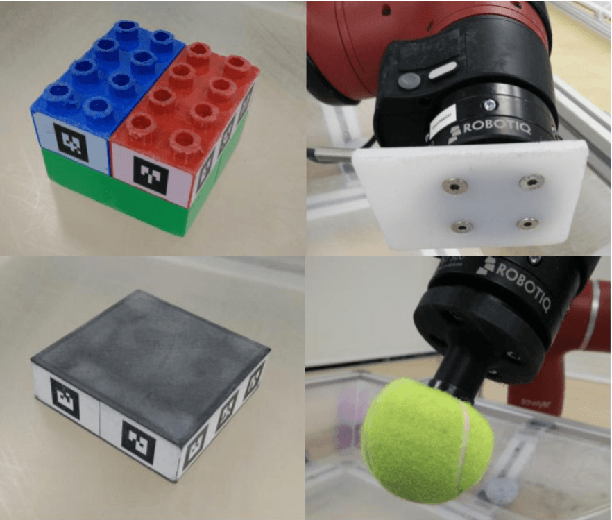
Learning robotic control policies in the real world gives rise to challenges in data efficiency, safety, and controlling the initial condition of the system. On the other hand, simulations are a useful alternative as they provide an abundant source of data without the restrictions of the real world. Unfortunately, simulations often fail to accurately model complex real-world phenomena. Traditional system identification techniques are limited in expressiveness by the analytical model parameters, and usually are not sufficient to capture such phenomena. In this paper we propose a general framework for improving the analytical model by optimizing state dependent generalized forces. State dependent generalized forces are expressive enough to model constraints in the equations of motion, while maintaining a clear physical meaning and intuition. We use reinforcement learning to efficiently optimize the mapping from states to generalized forces over a discounted infinite horizon. We show that using only minutes of real world data improves the sim-to-real control policy transfer. We demonstrate the feasibility of our approach by validating it on a nonprehensile manipulation task on the Sawyer robot.
Self-Supervised Sim-to-Real Adaptation for Visual Robotic Manipulation
Oct 21, 2019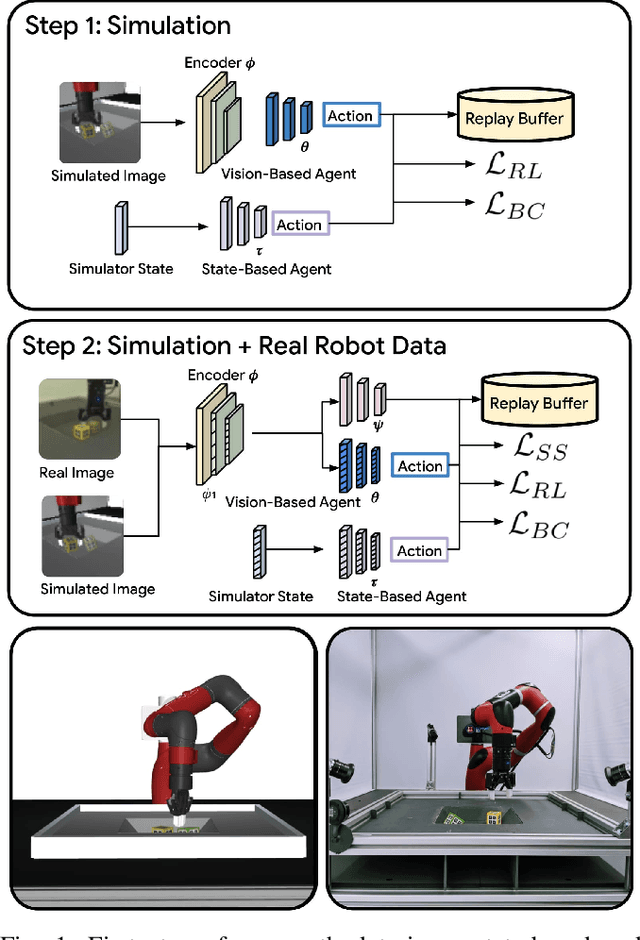
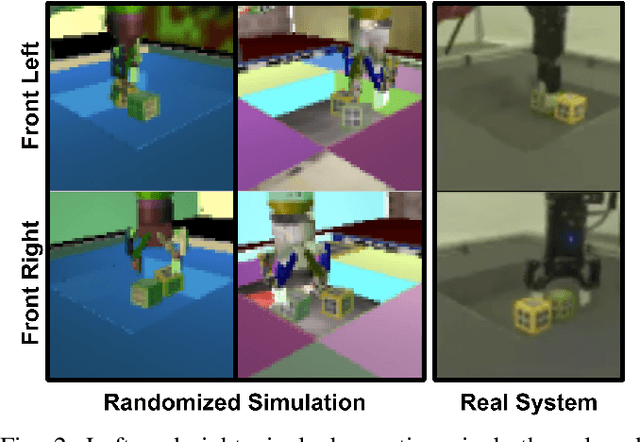
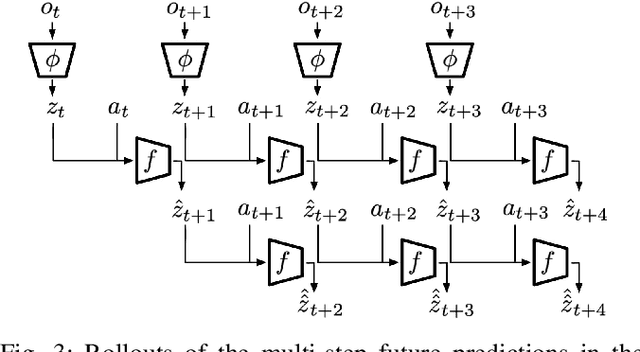
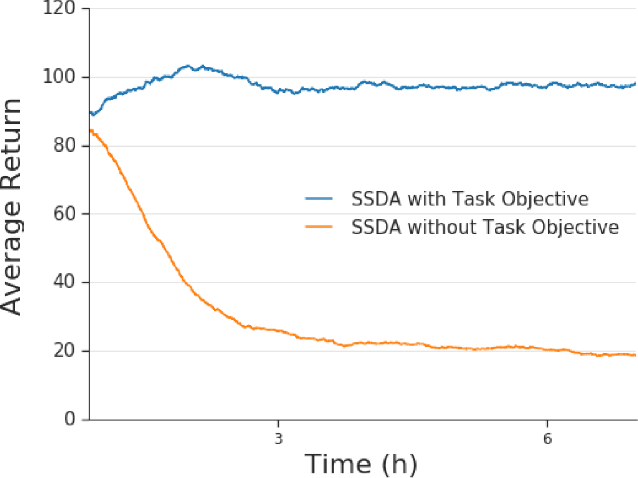
Collecting and automatically obtaining reward signals from real robotic visual data for the purposes of training reinforcement learning algorithms can be quite challenging and time-consuming. Methods for utilizing unlabeled data can have a huge potential to further accelerate robotic learning. We consider here the problem of performing manipulation tasks from pixels. In such tasks, choosing an appropriate state representation is crucial for planning and control. This is even more relevant with real images where noise, occlusions and resolution affect the accuracy and reliability of state estimation. In this work, we learn a latent state representation implicitly with deep reinforcement learning in simulation, and then adapt it to the real domain using unlabeled real robot data. We propose to do so by optimizing sequence-based self supervised objectives. These exploit the temporal nature of robot experience, and can be common in both the simulated and real domains, without assuming any alignment of underlying states in simulated and unlabeled real images. We propose Contrastive Forward Dynamics loss, which combines dynamics model learning with time-contrastive techniques. The learned state representation that results from our methods can be used to robustly solve a manipulation task in simulation and to successfully transfer the learned skill on a real system. We demonstrate the effectiveness of our approaches by training a vision-based reinforcement learning agent for cube stacking. Agents trained with our method, using only 5 hours of unlabeled real robot data for adaptation, shows a clear improvement over domain randomization, and standard visual domain adaptation techniques for sim-to-real transfer.
A Framework for Data-Driven Robotics
Sep 26, 2019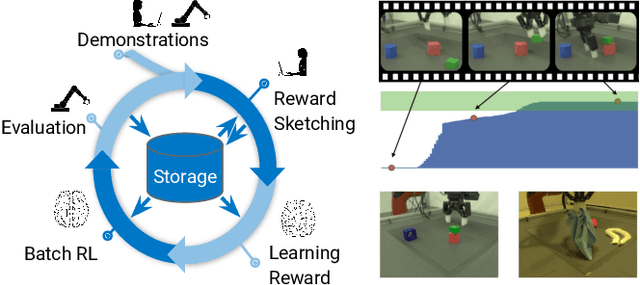
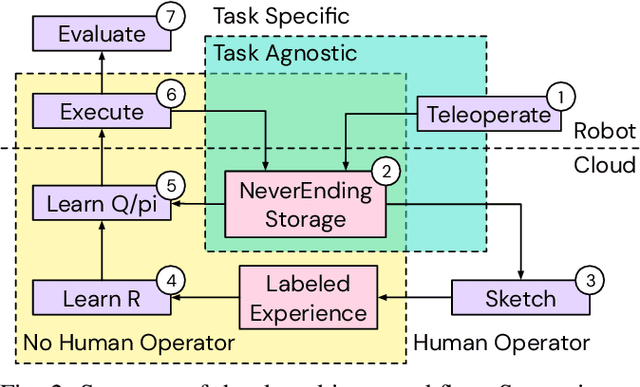
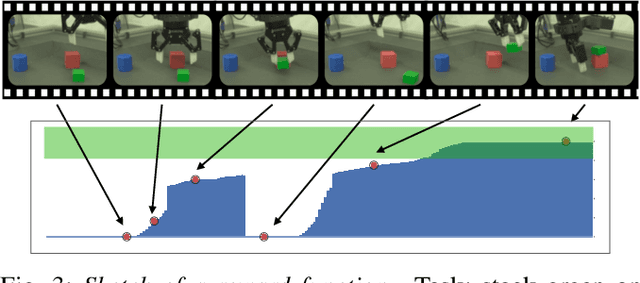
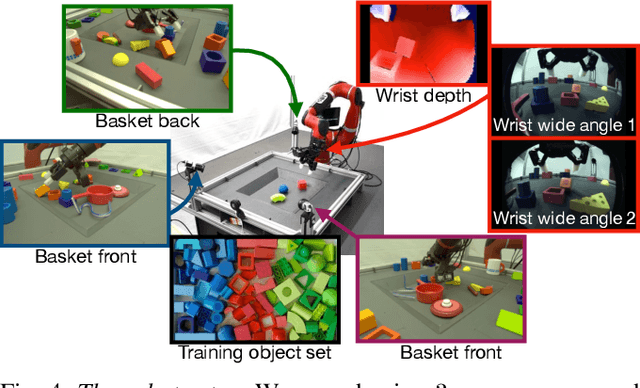
We present a framework for data-driven robotics that makes use of a large dataset of recorded robot experience and scales to several tasks using learned reward functions. We show how to apply this framework to accomplish three different object manipulation tasks on a real robot platform. Given demonstrations of a task together with task-agnostic recorded experience, we use a special form of human annotation as supervision to learn a reward function, which enables us to deal with real-world tasks where the reward signal cannot be acquired directly. Learned rewards are used in combination with a large dataset of experience from different tasks to learn a robot policy offline using batch RL. We show that using our approach it is possible to train agents to perform a variety of challenging manipulation tasks including stacking rigid objects and handling cloth.
Robust Reinforcement Learning for Continuous Control with Model Misspecification
Jun 18, 2019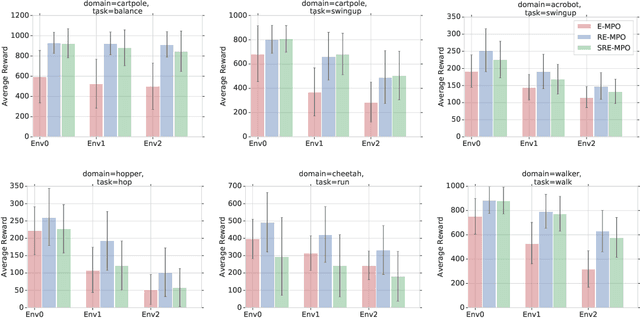
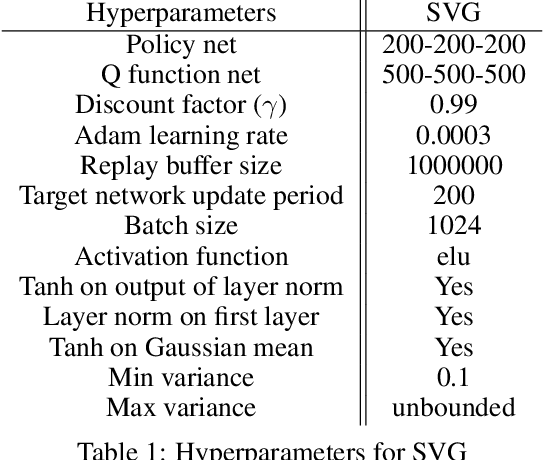
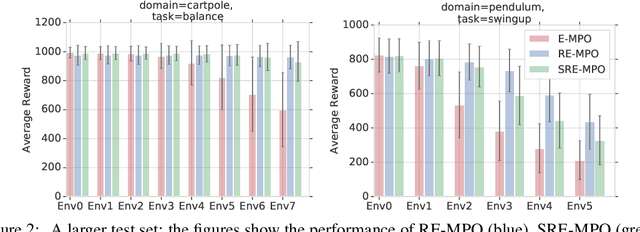
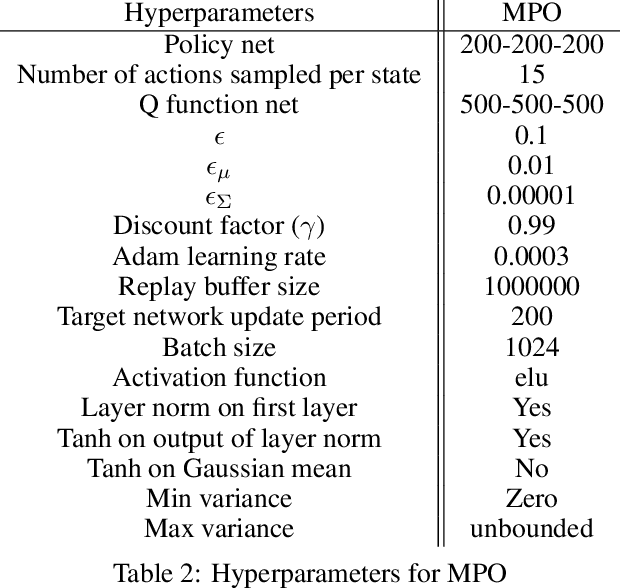
We provide a framework for incorporating robustness -- to perturbations in the transition dynamics which we refer to as model misspecification -- into continuous control Reinforcement Learning (RL) algorithms. We specifically focus on incorporating robustness into a state-of-the-art continuous control RL algorithm called Maximum a-posteriori Policy Optimization (MPO). We achieve this by learning a policy that optimizes for a worst case, entropy-regularized, expected return objective and derive a corresponding robust entropy-regularized Bellman contraction operator. In addition, we introduce a less conservative, soft-robust, entropy-regularized objective with a corresponding Bellman operator. We show that both, robust and soft-robust policies, outperform their non-robust counterparts in nine Mujoco domains with environment perturbations. Finally, we present multiple investigative experiments that provide a deeper insight into the robustness framework; including an adaptation to another continuous control RL algorithm as well as comparing this approach to domain randomization. Performance videos can be found online at https://sites.google.com/view/robust-rl.