 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Task-agnostic Continual Learning with Hybrid Probabilistic Models
Jun 24, 2021



Learning new tasks continuously without forgetting on a constantly changing data distribution is essential for real-world problems but extremely challenging for modern deep learning. In this work we propose HCL, a Hybrid generative-discriminative approach to Continual Learning for classification. We model the distribution of each task and each class with a normalizing flow. The flow is used to learn the data distribution, perform classification, identify task changes, and avoid forgetting, all leveraging the invertibility and exact likelihood which are uniquely enabled by the normalizing flow model. We use the generative capabilities of the flow to avoid catastrophic forgetting through generative replay and a novel functional regularization technique. For task identification, we use state-of-the-art anomaly detection techniques based on measuring the typicality of the model's statistics. We demonstrate the strong performance of HCL on a range of continual learning benchmarks such as split-MNIST, split-CIFAR, and SVHN-MNIST.
Neural Rate Control for Video Encoding using Imitation Learning
Dec 09, 2020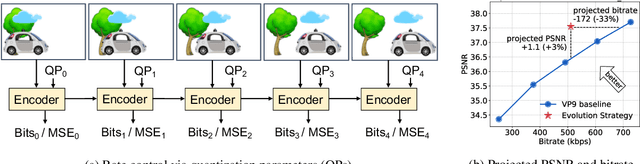
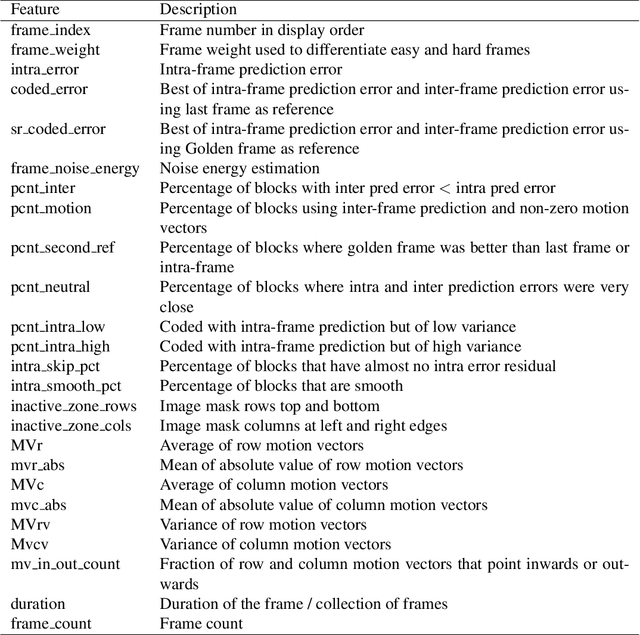
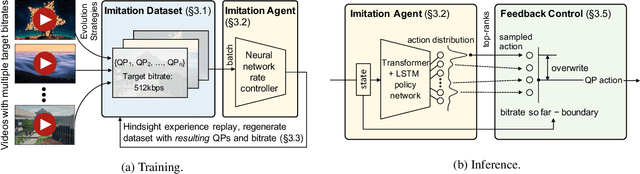
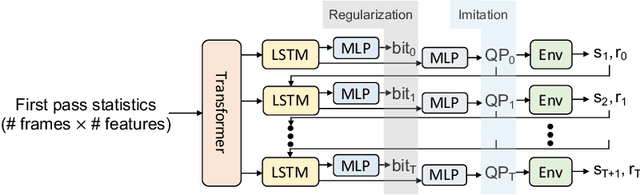
In modern video encoders, rate control is a critical component and has been heavily engineered. It decides how many bits to spend to encode each frame, in order to optimize the rate-distortion trade-off over all video frames. This is a challenging constrained planning problem because of the complex dependency among decisions for different video frames and the bitrate constraint defined at the end of the episode. We formulate the rate control problem as a Partially Observable Markov Decision Process (POMDP), and apply imitation learning to learn a neural rate control policy. We demonstrate that by learning from optimal video encoding trajectories obtained through evolution strategies, our learned policy achieves better encoding efficiency and has minimal constraint violation. In addition to imitating the optimal actions, we find that additional auxiliary losses, data augmentation/refinement and inference-time policy improvements are critical for learning a good rate control policy. We evaluate the learned policy against the rate control policy in libvpx, a widely adopted open source VP9 codec library, in the two-pass variable bitrate (VBR) mode. We show that over a diverse set of real-world videos, our learned policy achieves 8.5% median bitrate reduction without sacrificing video quality.
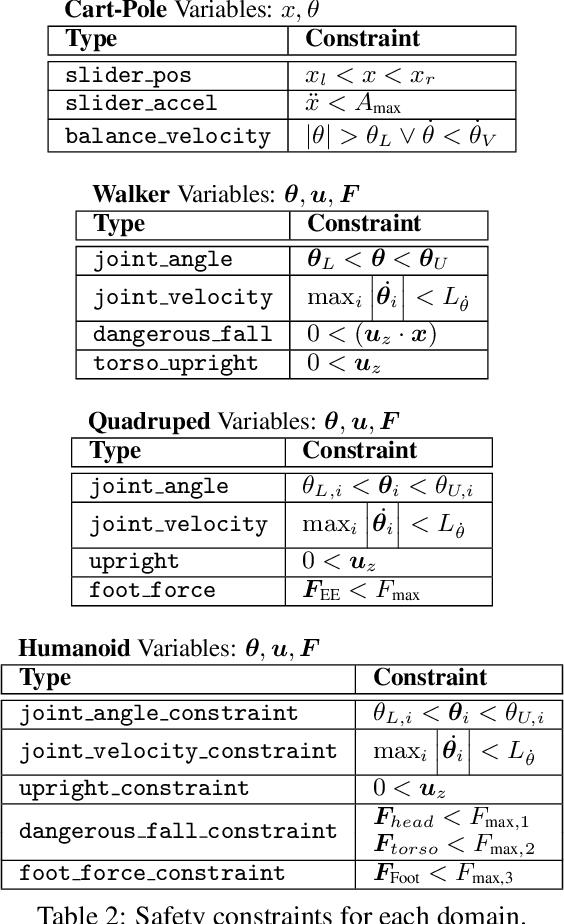
Balancing Constraints and Rewards with Meta-Gradient D4PG
Oct 13, 2020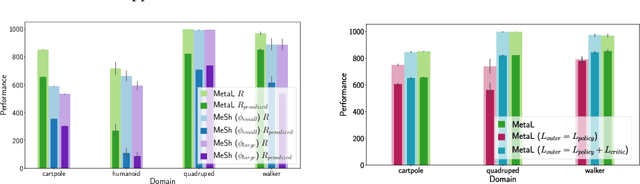
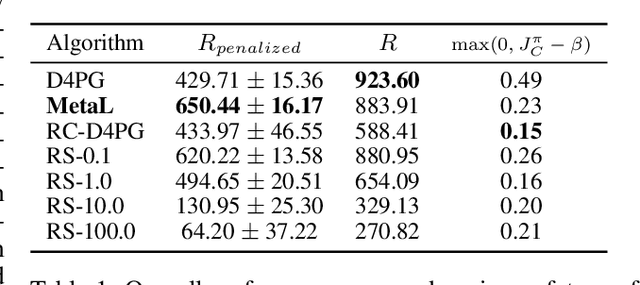

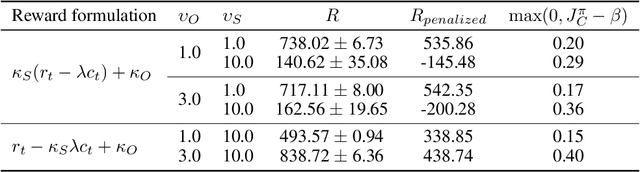
Deploying Reinforcement Learning (RL) agents to solve real-world applications often requires satisfying complex system constraints. Often the constraint thresholds are incorrectly set due to the complex nature of a system or the inability to verify the thresholds offline (e.g, no simulator or reasonable offline evaluation procedure exists). This results in solutions where a task cannot be solved without violating the constraints. However, in many real-world cases, constraint violations are undesirable yet they are not catastrophic, motivating the need for soft-constrained RL approaches. We present two soft-constrained RL approaches that utilize meta-gradients to find a good trade-off between expected return and minimizing constraint violations. We demonstrate the effectiveness of these approaches by showing that they consistently outperform the baselines across four different Mujoco domains.
A maximum-entropy approach to off-policy evaluation in average-reward MDPs
Jun 17, 2020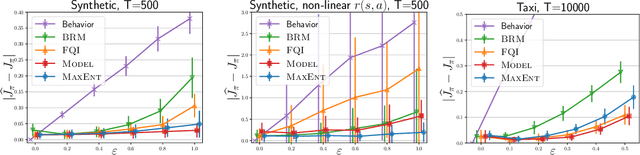
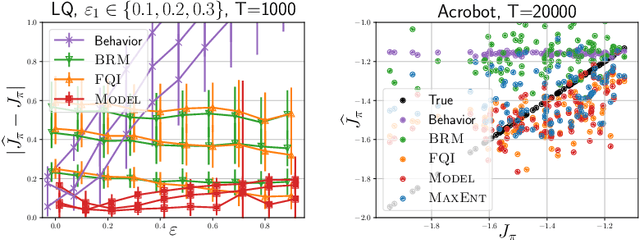
This work focuses on off-policy evaluation (OPE) with function approximation in infinite-horizon undiscounted Markov decision processes (MDPs). For MDPs that are ergodic and linear (i.e. where rewards and dynamics are linear in some known features), we provide the first finite-sample OPE error bound, extending existing results beyond the episodic and discounted cases. In a more general setting, when the feature dynamics are approximately linear and for arbitrary rewards, we propose a new approach for estimating stationary distributions with function approximation. We formulate this problem as finding the maximum-entropy distribution subject to matching feature expectations under empirical dynamics. We show that this results in an exponential-family distribution whose sufficient statistics are the features, paralleling maximum-entropy approaches in supervised learning. We demonstrate the effectiveness of the proposed OPE approaches in multiple environments.
An empirical investigation of the challenges of real-world reinforcement learning
Mar 24, 2020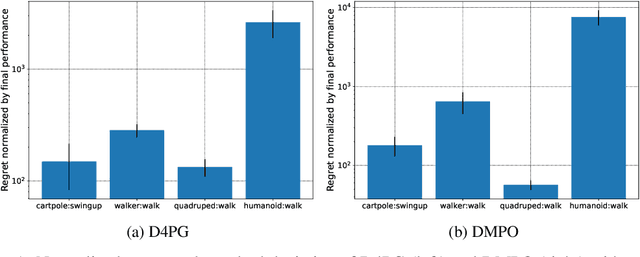
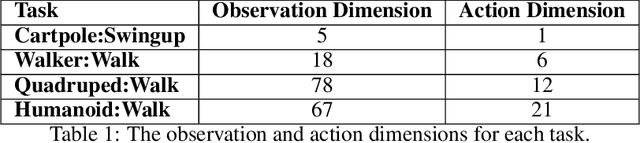
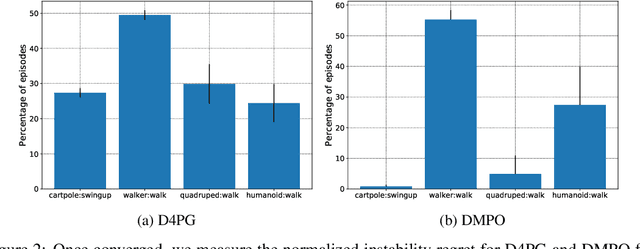
Reinforcement learning (RL) has proven its worth in a series of artificial domains, and is beginning to show some successes in real-world scenarios. However, much of the research advances in RL are hard to leverage in real-world systems due to a series of assumptions that are rarely satisfied in practice. In this work, we identify and formalize a series of independent challenges that embody the difficulties that must be addressed for RL to be commonly deployed in real-world systems. For each challenge, we define it formally in the context of a Markov Decision Process, analyze the effects of the challenge on state-of-the-art learning algorithms, and present some existing attempts at tackling it. We believe that an approach that addresses our set of proposed challenges would be readily deployable in a large number of real world problems. Our proposed challenges are implemented in a suite of continuous control environments called realworldrl-suite which we propose an as an open-source benchmark.
Prediction, Consistency, Curvature: Representation Learning for Locally-Linear Control
Sep 04, 2019



Many real-world sequential decision-making problems can be formulated as optimal control with high-dimensional observations and unknown dynamics. A promising approach is to embed the high-dimensional observations into a lower-dimensional latent representation space, estimate the latent dynamics model, then utilize this model for control in the latent space. An important open question is how to learn a representation that is amenable to existing control algorithms? In this paper, we focus on learning representations for locally-linear control algorithms, such as iterative LQR (iLQR). By formulating and analyzing the representation learning problem from an optimal control perspective, we establish three underlying principles that the learned representation should comprise: 1) accurate prediction in the observation space, 2) consistency between latent and observation space dynamics, and 3) low curvature in the latent space transitions. These principles naturally correspond to a loss function that consists of three terms: prediction, consistency, and curvature (PCC). Crucially, to make PCC tractable, we derive an amortized variational bound for the PCC loss function. Extensive experiments on benchmark domains demonstrate that the new variational-PCC learning algorithm benefits from significantly more stable and reproducible training, and leads to superior control performance. Further ablation studies give support to the importance of all three PCC components for learning a good latent space for control.
Robust Reinforcement Learning for Continuous Control with Model Misspecification
Jun 18, 2019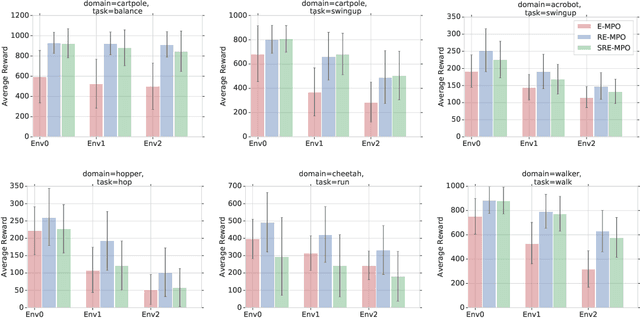
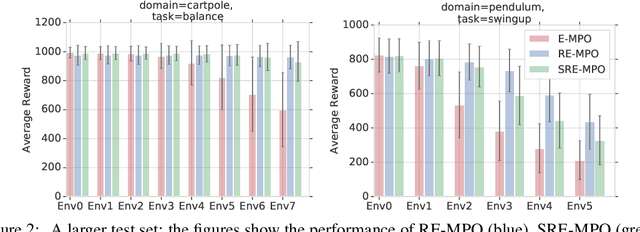
We provide a framework for incorporating robustness -- to perturbations in the transition dynamics which we refer to as model misspecification -- into continuous control Reinforcement Learning (RL) algorithms. We specifically focus on incorporating robustness into a state-of-the-art continuous control RL algorithm called Maximum a-posteriori Policy Optimization (MPO). We achieve this by learning a policy that optimizes for a worst case, entropy-regularized, expected return objective and derive a corresponding robust entropy-regularized Bellman contraction operator. In addition, we introduce a less conservative, soft-robust, entropy-regularized objective with a corresponding Bellman operator. We show that both, robust and soft-robust policies, outperform their non-robust counterparts in nine Mujoco domains with environment perturbations. Finally, we present multiple investigative experiments that provide a deeper insight into the robustness framework; including an adaptation to another continuous control RL algorithm as well as comparing this approach to domain randomization. Performance videos can be found online at https://sites.google.com/view/robust-rl.
Shallow Updates for Deep Reinforcement Learning
Nov 02, 2017



Deep reinforcement learning (DRL) methods such as the Deep Q-Network (DQN) have achieved state-of-the-art results in a variety of challenging, high-dimensional domains. This success is mainly attributed to the power of deep neural networks to learn rich domain representations for approximating the value function or policy. Batch reinforcement learning methods with linear representations, on the other hand, are more stable and require less hyper parameter tuning. Yet, substantial feature engineering is necessary to achieve good results. In this work we propose a hybrid approach -- the Least Squares Deep Q-Network (LS-DQN), which combines rich feature representations learned by a DRL algorithm with the stability of a linear least squares method. We do this by periodically re-training the last hidden layer of a DRL network with a batch least squares update. Key to our approach is a Bayesian regularization term for the least squares update, which prevents over-fitting to the more recent data. We tested LS-DQN on five Atari games and demonstrate significant improvement over vanilla DQN and Double-DQN. We also investigated the reasons for the superior performance of our method. Interestingly, we found that the performance improvement can be attributed to the large batch size used by the LS method when optimizing the last layer.