 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBuilding Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025



Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
FAIR Universe HiggsML Uncertainty Challenge Competition
Oct 03, 2024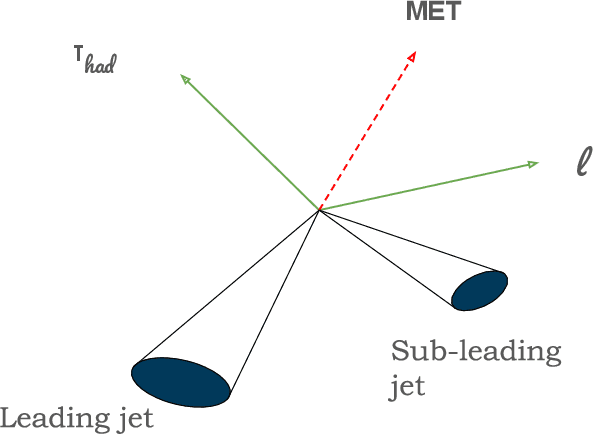
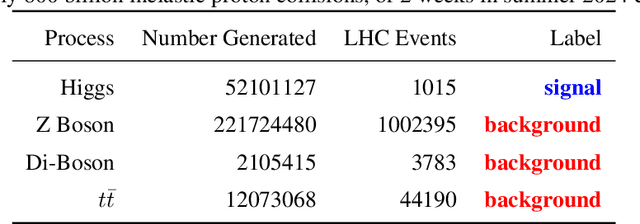
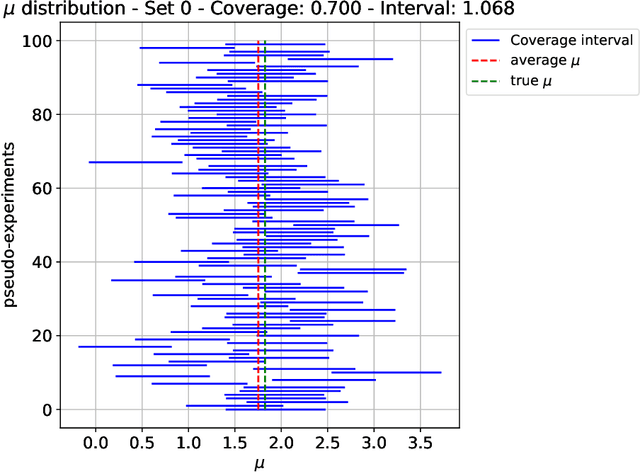
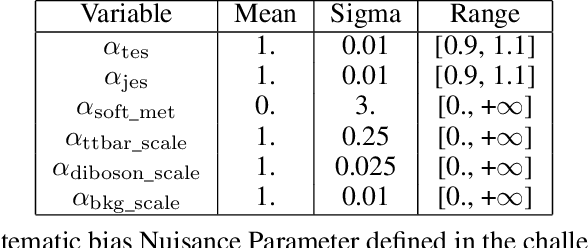
The FAIR Universe -- HiggsML Uncertainty Challenge focuses on measuring the physics properties of elementary particles with imperfect simulators due to differences in modelling systematic errors. Additionally, the challenge is leveraging a large-compute-scale AI platform for sharing datasets, training models, and hosting machine learning competitions. Our challenge brings together the physics and machine learning communities to advance our understanding and methodologies in handling systematic (epistemic) uncertainties within AI techniques.
Joint Shapley values: a measure of joint feature importance
Jul 23, 2021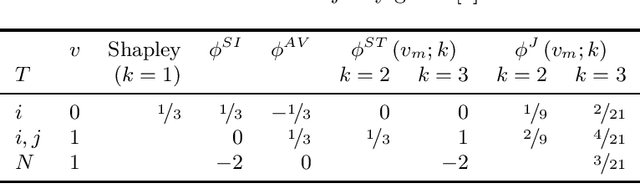


The Shapley value is one of the most widely used model-agnostic measures of feature importance in explainable AI: it has clear axiomatic foundations, is guaranteed to uniquely exist, and has a clear interpretation as a feature's average effect on a model's prediction. We introduce joint Shapley values, which directly extend the Shapley axioms. This preserves the classic Shapley value's intuitions: joint Shapley values measure a set of features' average effect on a model's prediction. We prove the uniqueness of joint Shapley values, for any order of explanation. Results for games show that joint Shapley values present different insights from existing interaction indices, which assess the effect of a feature within a set of features. Deriving joint Shapley values in ML attribution problems thus gives us the first measure of the joint effect of sets of features on model predictions. In a dataset with binary features, we present a presence-adjusted method for calculating global values that retains the efficiency property.
A maximum-entropy approach to off-policy evaluation in average-reward MDPs
Jun 17, 2020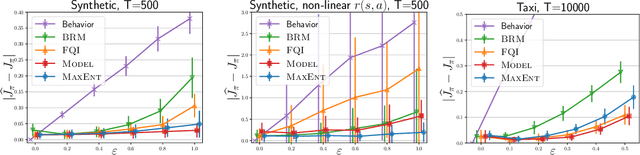
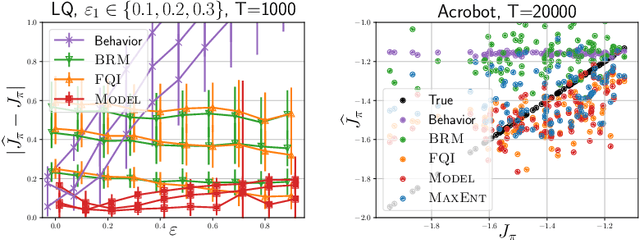
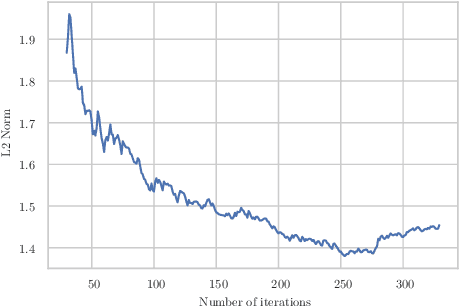
This work focuses on off-policy evaluation (OPE) with function approximation in infinite-horizon undiscounted Markov decision processes (MDPs). For MDPs that are ergodic and linear (i.e. where rewards and dynamics are linear in some known features), we provide the first finite-sample OPE error bound, extending existing results beyond the episodic and discounted cases. In a more general setting, when the feature dynamics are approximately linear and for arbitrary rewards, we propose a new approach for estimating stationary distributions with function approximation. We formulate this problem as finding the maximum-entropy distribution subject to matching feature expectations under empirical dynamics. We show that this results in an exponential-family distribution whose sufficient statistics are the features, paralleling maximum-entropy approaches in supervised learning. We demonstrate the effectiveness of the proposed OPE approaches in multiple environments.
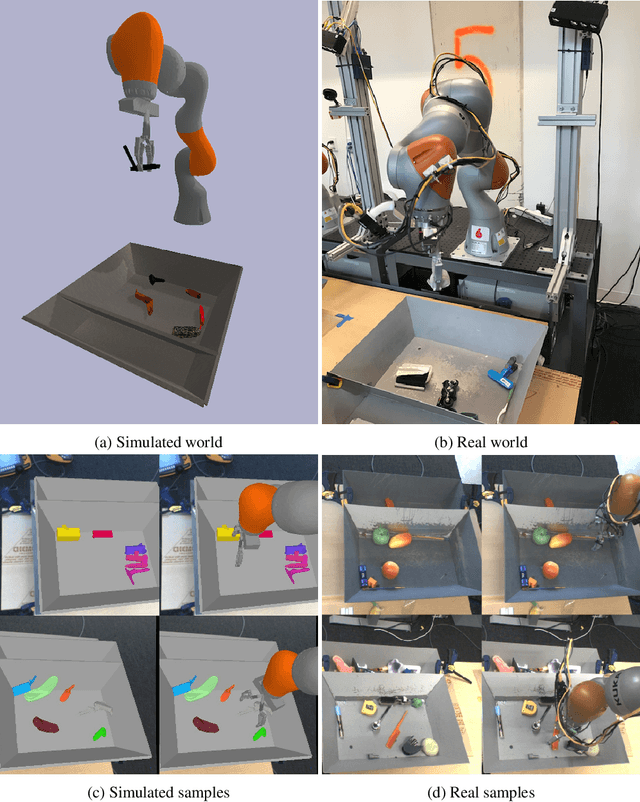
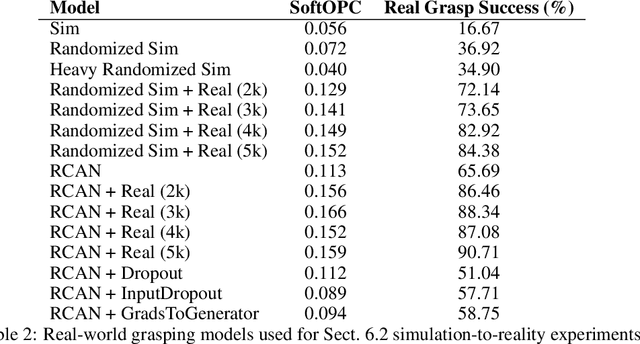
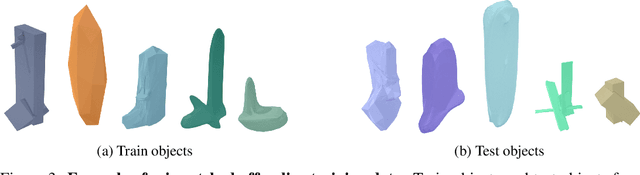
RL-CycleGAN: Reinforcement Learning Aware Simulation-To-Real
Jun 16, 2020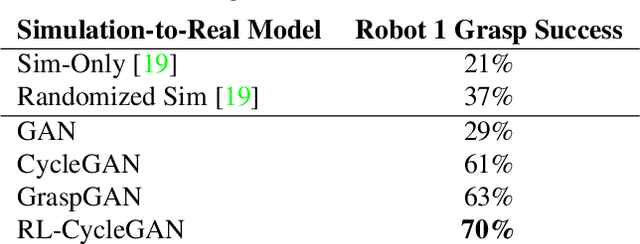
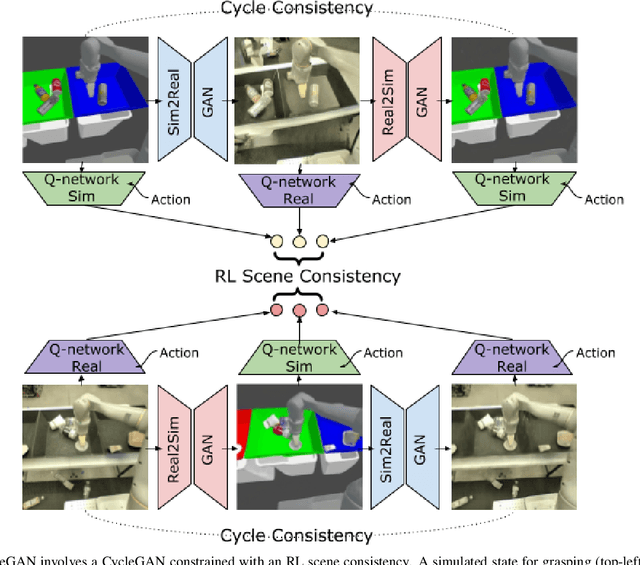
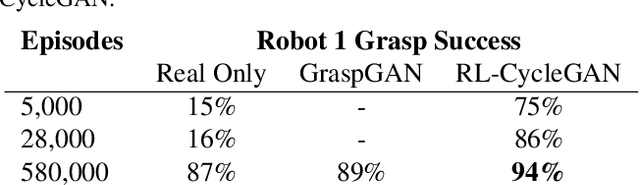
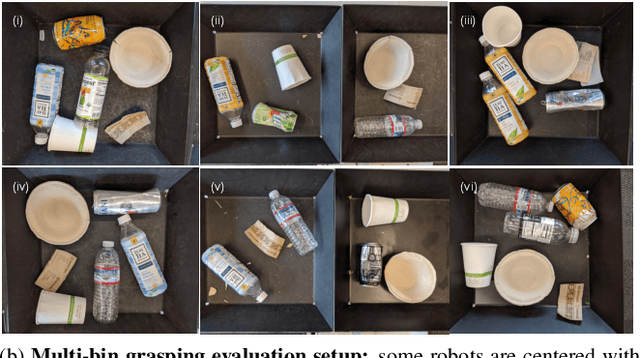
Deep neural network based reinforcement learning (RL) can learn appropriate visual representations for complex tasks like vision-based robotic grasping without the need for manually engineering or prior learning a perception system. However, data for RL is collected via running an agent in the desired environment, and for applications like robotics, running a robot in the real world may be extremely costly and time consuming. Simulated training offers an appealing alternative, but ensuring that policies trained in simulation can transfer effectively into the real world requires additional machinery. Simulations may not match reality, and typically bridging the simulation-to-reality gap requires domain knowledge and task-specific engineering. We can automate this process by employing generative models to translate simulated images into realistic ones. However, this sort of translation is typically task-agnostic, in that the translated images may not preserve all features that are relevant to the task. In this paper, we introduce the RL-scene consistency loss for image translation, which ensures that the translation operation is invariant with respect to the Q-values associated with the image. This allows us to learn a task-aware translation. Incorporating this loss into unsupervised domain translation, we obtain RL-CycleGAN, a new approach for simulation-to-real-world transfer for reinforcement learning. In evaluations of RL-CycleGAN on two vision-based robotics grasping tasks, we show that RL-CycleGAN offers a substantial improvement over a number of prior methods for sim-to-real transfer, attaining excellent real-world performance with only a modest number of real-world observations.
Off-Policy Evaluation via Off-Policy Classification
Jun 20, 2019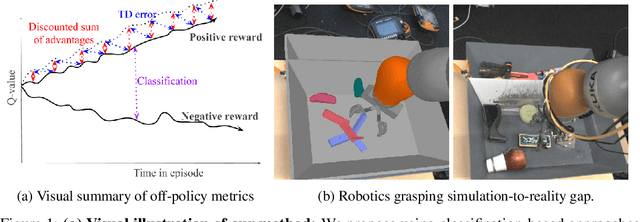
In this work, we consider the problem of model selection for deep reinforcement learning (RL) in real-world environments. Typically, the performance of deep RL algorithms is evaluated via on-policy interactions with the target environment. However, comparing models in a real-world environment for the purposes of early stopping or hyperparameter tuning is costly and often practically infeasible. This leads us to examine off-policy policy evaluation (OPE) in such settings. We focus on OPE for value-based methods, which are of particular interest in deep RL, with applications like robotics, where off-policy algorithms based on Q-function estimation can often attain better sample complexity than direct policy optimization. Existing OPE metrics either rely on a model of the environment, or the use of importance sampling (IS) to correct for the data being off-policy. However, for high-dimensional observations, such as images, models of the environment can be difficult to fit and value-based methods can make IS hard to use or even ill-conditioned, especially when dealing with continuous action spaces. In this paper, we focus on the specific case of MDPs with continuous action spaces and sparse binary rewards, which is representative of many important real-world applications. We propose an alternative metric that relies on neither models nor IS, by framing OPE as a positive-unlabeled (PU) classification problem with the Q-function as the decision function. We experimentally show that this metric outperforms baselines on a number of tasks. Most importantly, it can reliably predict the relative performance of different policies in a number of generalization scenarios, including the transfer to the real-world of policies trained in simulation for an image-based robotic manipulation task.