 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQ-Transformer: Scalable Offline Reinforcement Learning via Autoregressive Q-Functions
Sep 18, 2023



In this work, we present a scalable reinforcement learning method for training multi-task policies from large offline datasets that can leverage both human demonstrations and autonomously collected data. Our method uses a Transformer to provide a scalable representation for Q-functions trained via offline temporal difference backups. We therefore refer to the method as Q-Transformer. By discretizing each action dimension and representing the Q-value of each action dimension as separate tokens, we can apply effective high-capacity sequence modeling techniques for Q-learning. We present several design decisions that enable good performance with offline RL training, and show that Q-Transformer outperforms prior offline RL algorithms and imitation learning techniques on a large diverse real-world robotic manipulation task suite. The project's website and videos can be found at https://q-transformer.github.io
Deep RL at Scale: Sorting Waste in Office Buildings with a Fleet of Mobile Manipulators
May 05, 2023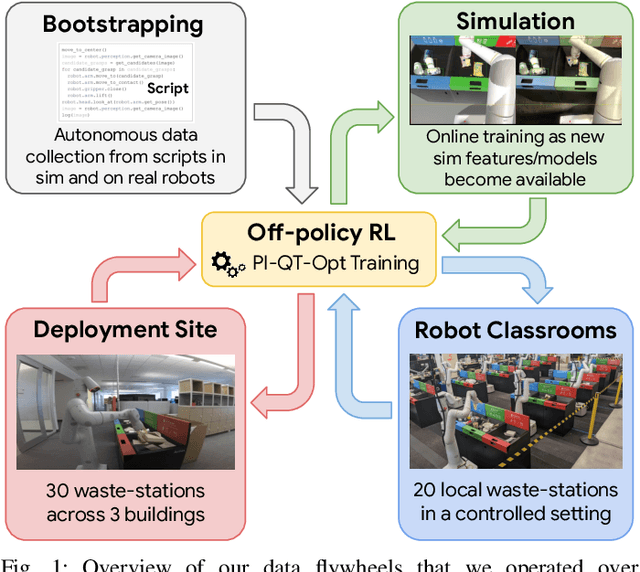
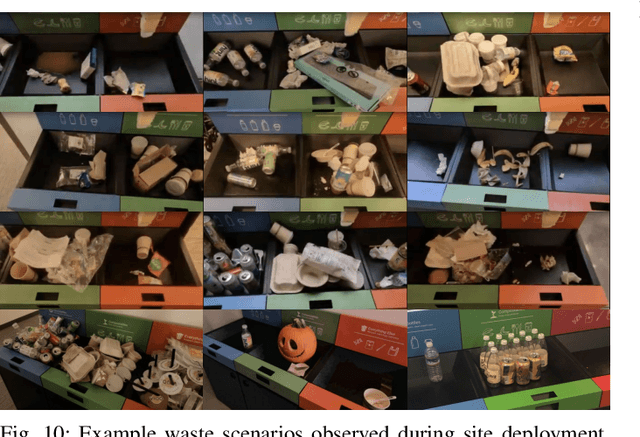
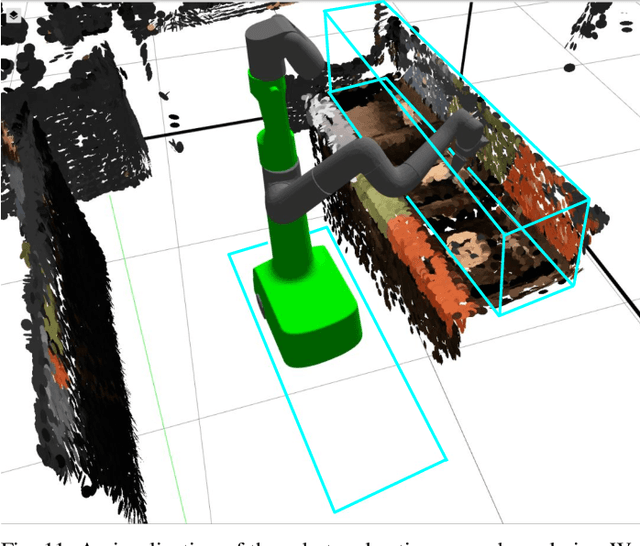
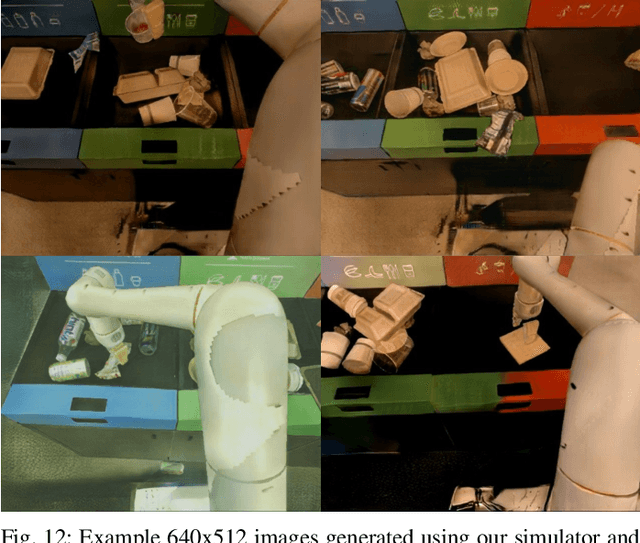
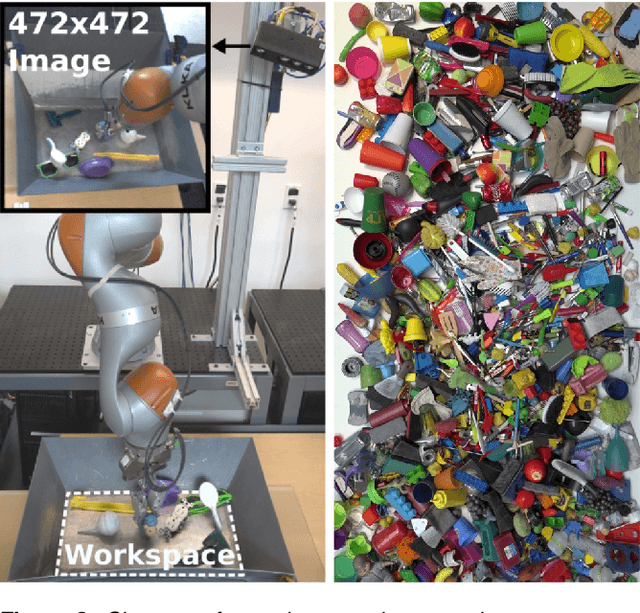
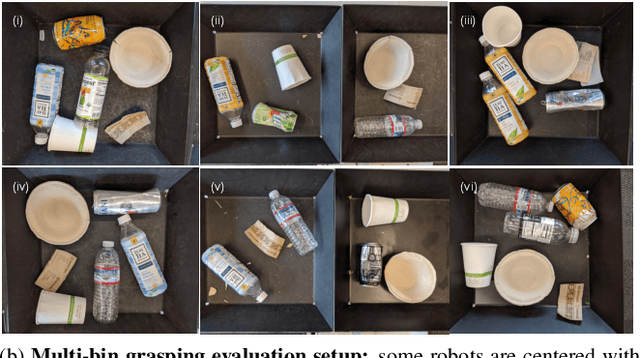
We describe a system for deep reinforcement learning of robotic manipulation skills applied to a large-scale real-world task: sorting recyclables and trash in office buildings. Real-world deployment of deep RL policies requires not only effective training algorithms, but the ability to bootstrap real-world training and enable broad generalization. To this end, our system combines scalable deep RL from real-world data with bootstrapping from training in simulation, and incorporates auxiliary inputs from existing computer vision systems as a way to boost generalization to novel objects, while retaining the benefits of end-to-end training. We analyze the tradeoffs of different design decisions in our system, and present a large-scale empirical validation that includes training on real-world data gathered over the course of 24 months of experimentation, across a fleet of 23 robots in three office buildings, with a total training set of 9527 hours of robotic experience. Our final validation also consists of 4800 evaluation trials across 240 waste station configurations, in order to evaluate in detail the impact of the design decisions in our system, the scaling effects of including more real-world data, and the performance of the method on novel objects. The projects website and videos can be found at \href{http://rl-at-scale.github.io}{rl-at-scale.github.io}.
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022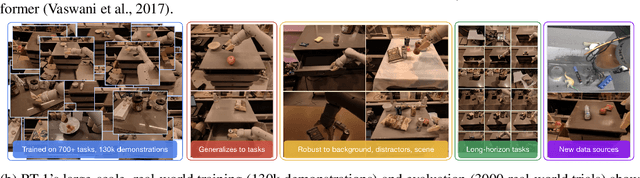
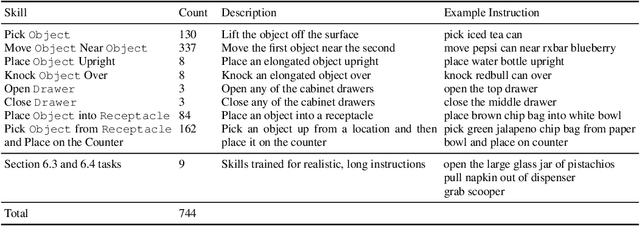
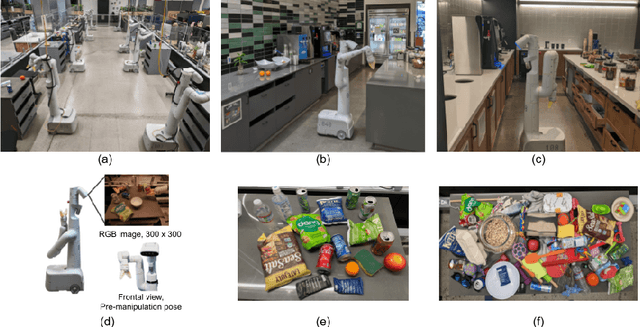
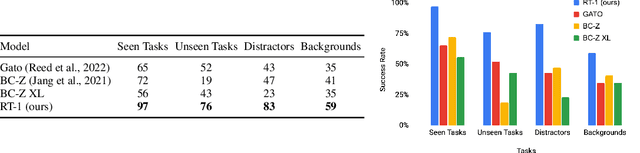
By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io
Token Turing Machines
Nov 16, 2022



We propose Token Turing Machines (TTM), a sequential, autoregressive Transformer model with memory for real-world sequential visual understanding. Our model is inspired by the seminal Neural Turing Machine, and has an external memory consisting of a set of tokens which summarise the previous history (i.e., frames). This memory is efficiently addressed, read and written using a Transformer as the processing unit/controller at each step. The model's memory module ensures that a new observation will only be processed with the contents of the memory (and not the entire history), meaning that it can efficiently process long sequences with a bounded computational cost at each step. We show that TTM outperforms other alternatives, such as other Transformer models designed for long sequences and recurrent neural networks, on two real-world sequential visual understanding tasks: online temporal activity detection from videos and vision-based robot action policy learning.
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
Apr 04, 2022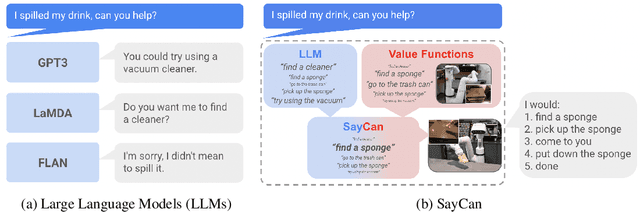
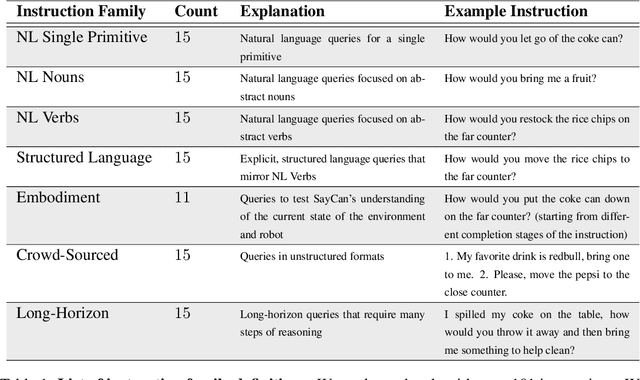
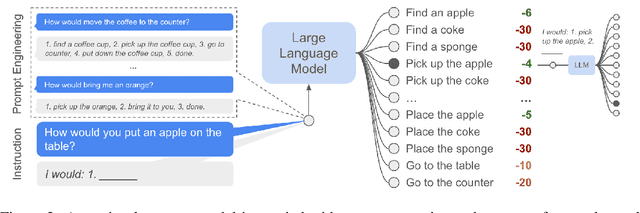
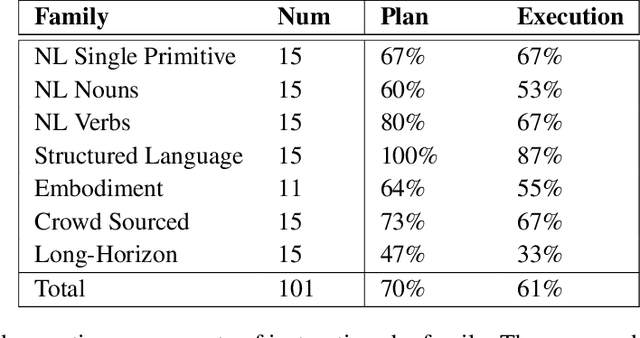
Large language models can encode a wealth of semantic knowledge about the world. Such knowledge could be extremely useful to robots aiming to act upon high-level, temporally extended instructions expressed in natural language. However, a significant weakness of language models is that they lack real-world experience, which makes it difficult to leverage them for decision making within a given embodiment. For example, asking a language model to describe how to clean a spill might result in a reasonable narrative, but it may not be applicable to a particular agent, such as a robot, that needs to perform this task in a particular environment. We propose to provide real-world grounding by means of pretrained skills, which are used to constrain the model to propose natural language actions that are both feasible and contextually appropriate. The robot can act as the language model's "hands and eyes," while the language model supplies high-level semantic knowledge about the task. We show how low-level skills can be combined with large language models so that the language model provides high-level knowledge about the procedures for performing complex and temporally-extended instructions, while value functions associated with these skills provide the grounding necessary to connect this knowledge to a particular physical environment. We evaluate our method on a number of real-world robotic tasks, where we show the need for real-world grounding and that this approach is capable of completing long-horizon, abstract, natural language instructions on a mobile manipulator. The project's website and the video can be found at https://say-can.github.io/
MESA: Offline Meta-RL for Safe Adaptation and Fault Tolerance
Dec 07, 2021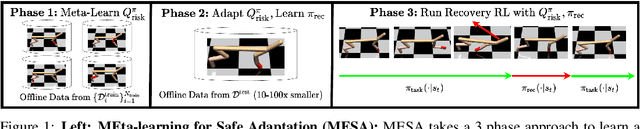
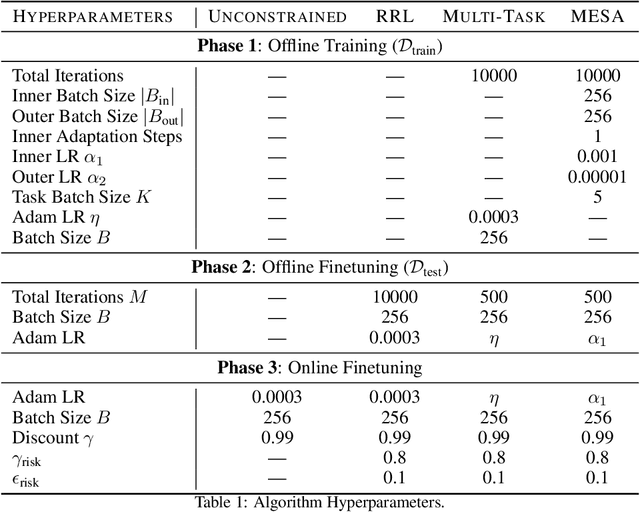
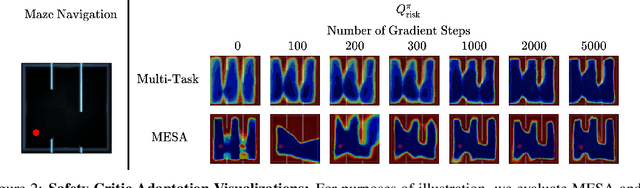

Safe exploration is critical for using reinforcement learning (RL) in risk-sensitive environments. Recent work learns risk measures which measure the probability of violating constraints, which can then be used to enable safety. However, learning such risk measures requires significant interaction with the environment, resulting in excessive constraint violations during learning. Furthermore, these measures are not easily transferable to new environments. We cast safe exploration as an offline meta-RL problem, where the objective is to leverage examples of safe and unsafe behavior across a range of environments to quickly adapt learned risk measures to a new environment with previously unseen dynamics. We then propose MEta-learning for Safe Adaptation (MESA), an approach for meta-learning a risk measure for safe RL. Simulation experiments across 5 continuous control domains suggest that MESA can leverage offline data from a range of different environments to reduce constraint violations in unseen environments by up to a factor of 2 while maintaining task performance. See https://tinyurl.com/safe-meta-rl for code and supplementary material.
Visionary: Vision architecture discovery for robot learning
Mar 26, 2021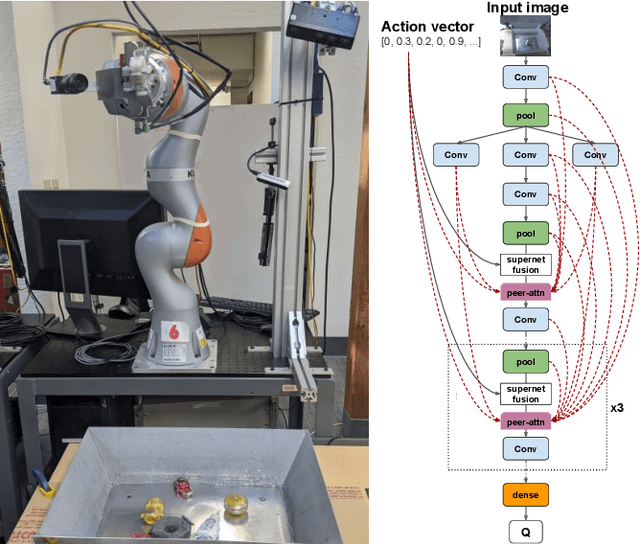
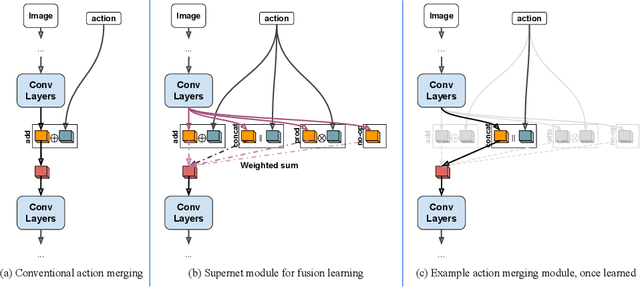
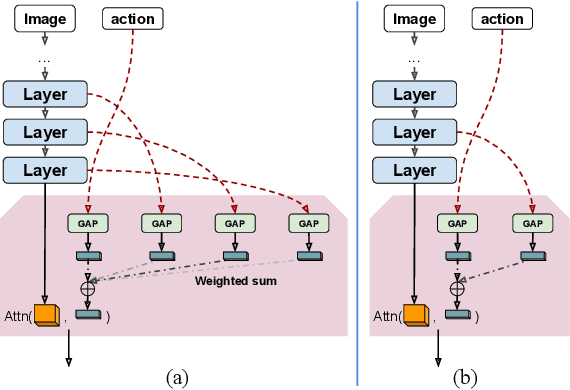

We propose a vision-based architecture search algorithm for robot manipulation learning, which discovers interactions between low dimension action inputs and high dimensional visual inputs. Our approach automatically designs architectures while training on the task - discovering novel ways of combining and attending image feature representations with actions as well as features from previous layers. The obtained new architectures demonstrate better task success rates, in some cases with a large margin, compared to a recent high performing baseline. Our real robot experiments also confirm that it improves grasping performance by 6%. This is the first approach to demonstrate a successful neural architecture search and attention connectivity search for a real-robot task.
How to Train Your Robot with Deep Reinforcement Learning; Lessons We've Learned
Feb 04, 2021

Deep reinforcement learning (RL) has emerged as a promising approach for autonomously acquiring complex behaviors from low level sensor observations. Although a large portion of deep RL research has focused on applications in video games and simulated control, which does not connect with the constraints of learning in real environments, deep RL has also demonstrated promise in enabling physical robots to learn complex skills in the real world. At the same time,real world robotics provides an appealing domain for evaluating such algorithms, as it connects directly to how humans learn; as an embodied agent in the real world. Learning to perceive and move in the real world presents numerous challenges, some of which are easier to address than others, and some of which are often not considered in RL research that focuses only on simulated domains. In this review article, we present a number of case studies involving robotic deep RL. Building off of these case studies, we discuss commonly perceived challenges in deep RL and how they have been addressed in these works. We also provide an overview of other outstanding challenges, many of which are unique to the real-world robotics setting and are not often the focus of mainstream RL research. Our goal is to provide a resource both for roboticists and machine learning researchers who are interested in furthering the progress of deep RL in the real world.
Recovery RL: Safe Reinforcement Learning with Learned Recovery Zones
Oct 29, 2020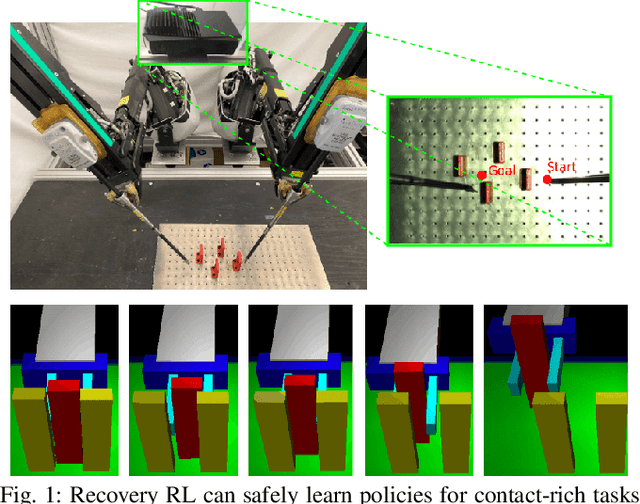
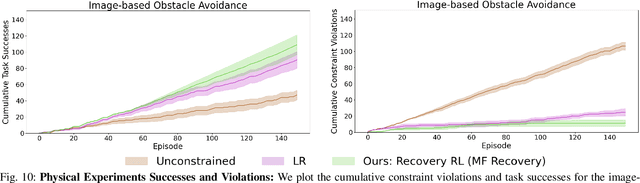
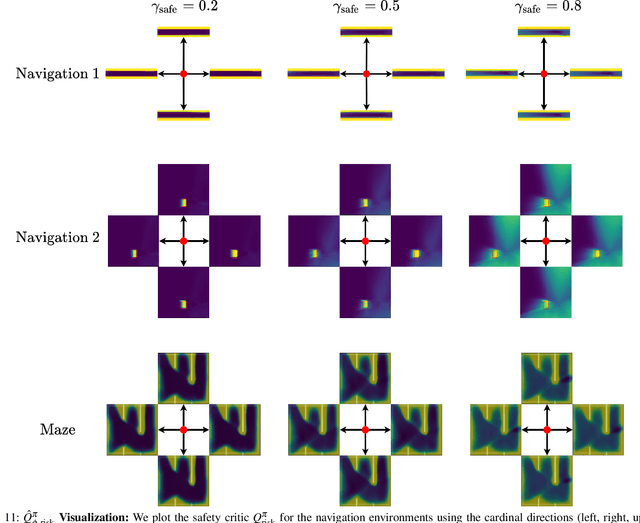
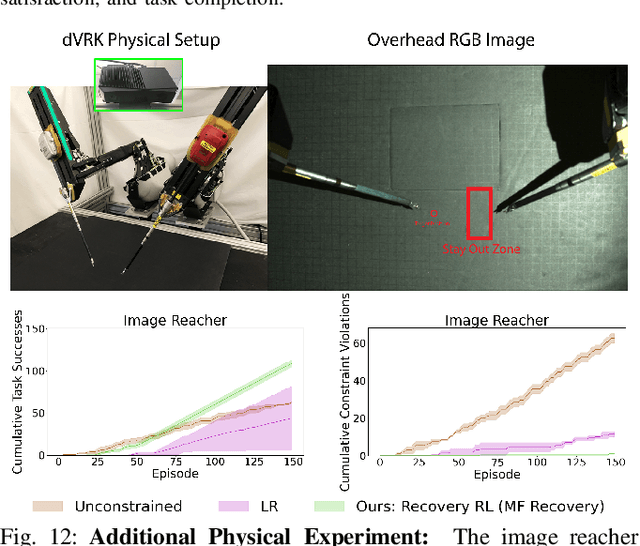
Safety remains a central obstacle preventing widespread use of RL in the real world: learning new tasks in uncertain environments requires extensive exploration, but safety requires limiting exploration. We propose Recovery RL, an algorithm which navigates this tradeoff by (1) leveraging offline data to learn about constraint violating zones before policy learning and (2) separating the goals of improving task performance and constraint satisfaction across two policies: a task policy that only optimizes the task reward and a recovery policy that guides the agent to safety when constraint violation is likely. We evaluate Recovery RL on 6 simulation domains, including two contact-rich manipulation tasks and an image-based navigation task, and an image-based obstacle avoidance task on a physical robot. We compare Recovery RL to 5 prior safe RL methods which jointly optimize for task performance and safety via constrained optimization or reward shaping and find that Recovery RL outperforms the next best prior method across all domains. Results suggest that Recovery RL trades off constraint violations and task successes 2 - 80 times more efficiently in simulation domains and 3 times more efficiently in physical experiments. See https://tinyurl.com/rl-recovery for videos and supplementary material.
RL-CycleGAN: Reinforcement Learning Aware Simulation-To-Real
Jun 16, 2020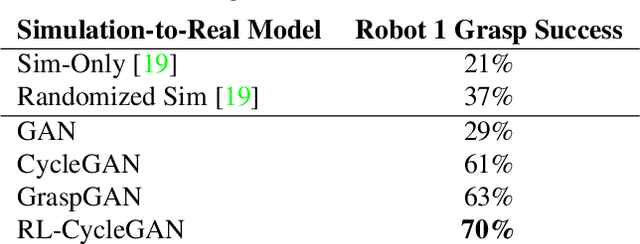
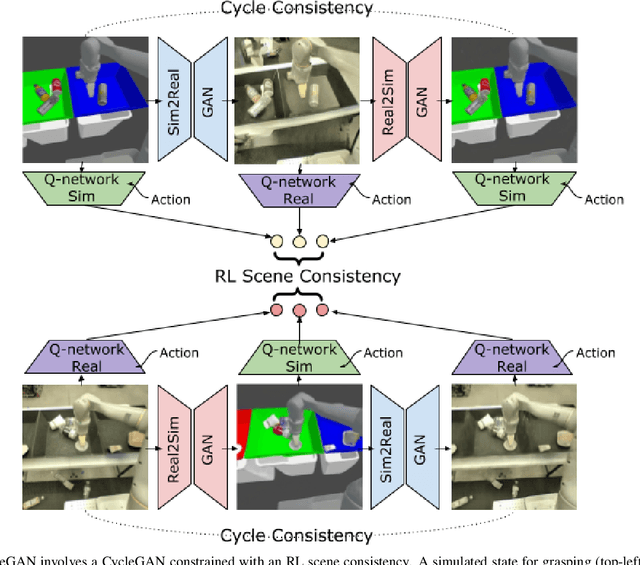
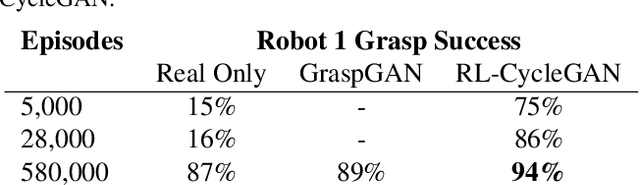
Deep neural network based reinforcement learning (RL) can learn appropriate visual representations for complex tasks like vision-based robotic grasping without the need for manually engineering or prior learning a perception system. However, data for RL is collected via running an agent in the desired environment, and for applications like robotics, running a robot in the real world may be extremely costly and time consuming. Simulated training offers an appealing alternative, but ensuring that policies trained in simulation can transfer effectively into the real world requires additional machinery. Simulations may not match reality, and typically bridging the simulation-to-reality gap requires domain knowledge and task-specific engineering. We can automate this process by employing generative models to translate simulated images into realistic ones. However, this sort of translation is typically task-agnostic, in that the translated images may not preserve all features that are relevant to the task. In this paper, we introduce the RL-scene consistency loss for image translation, which ensures that the translation operation is invariant with respect to the Q-values associated with the image. This allows us to learn a task-aware translation. Incorporating this loss into unsupervised domain translation, we obtain RL-CycleGAN, a new approach for simulation-to-real-world transfer for reinforcement learning. In evaluations of RL-CycleGAN on two vision-based robotics grasping tasks, we show that RL-CycleGAN offers a substantial improvement over a number of prior methods for sim-to-real transfer, attaining excellent real-world performance with only a modest number of real-world observations.