 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomously Untangling Long Cables
Jul 16, 2022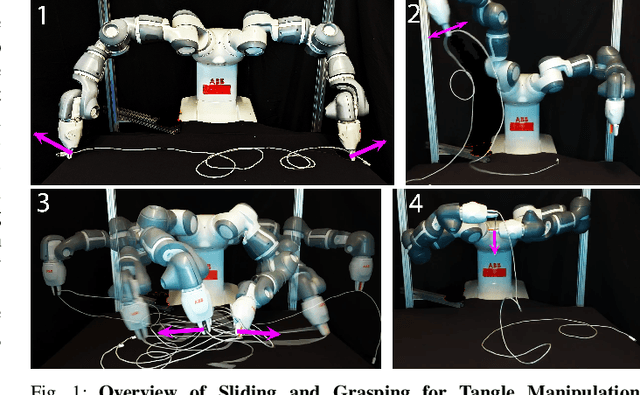
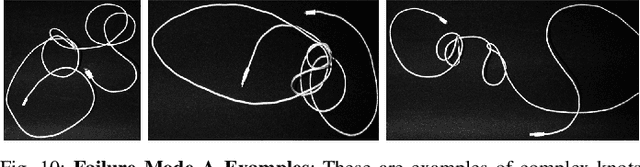
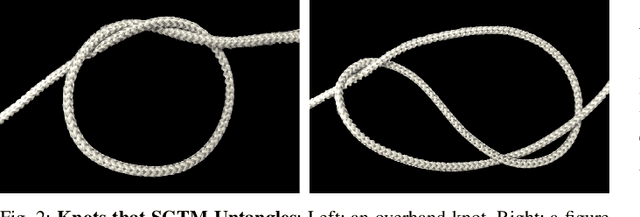
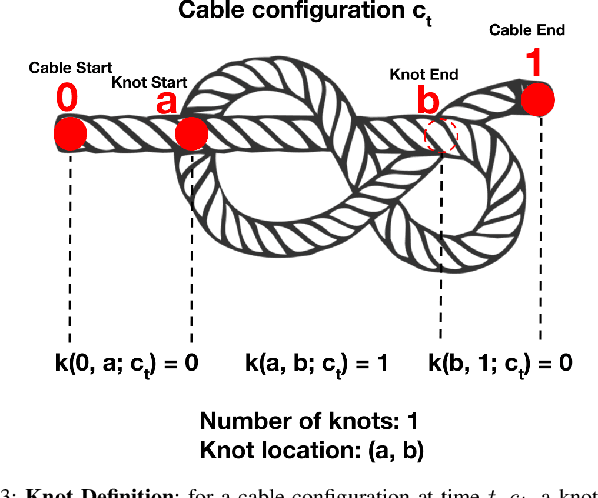
Cables are ubiquitous in many settings, but are prone to self-occlusions and knots, making them difficult to perceive and manipulate. The challenge often increases with cable length: long cables require more complex slack management and strategies to facilitate observability and reachability. In this paper, we focus on autonomously untangling cables up to 3 meters in length using a bilateral robot. We develop new motion primitives to efficiently untangle long cables and novel gripper jaws specialized for this task. We present Sliding and Grasping for Tangle Manipulation (SGTM), an algorithm that composes these primitives with RGBD vision to iteratively untangle. SGTM untangles cables with success rates of 67% on isolated overhand and figure eight knots and 50% on more complex configurations. Supplementary material, visualizations, and videos can be found at https://sites.google.com/view/rss-2022-untangling/home.
Fleet-DAgger: Interactive Robot Fleet Learning with Scalable Human Supervision
Jun 29, 2022
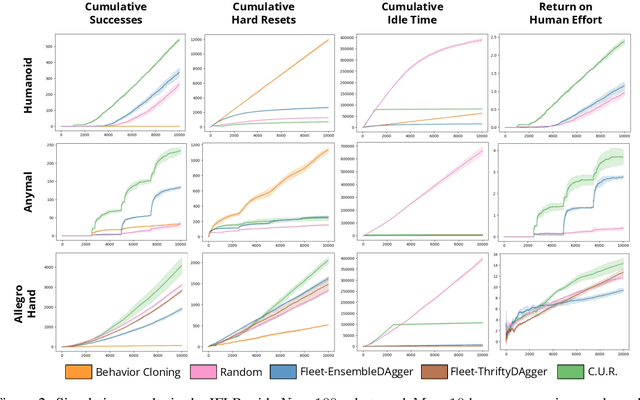
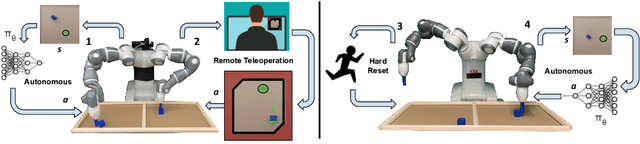
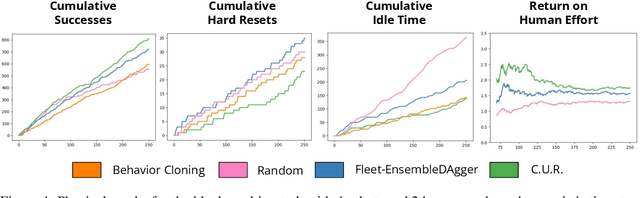
Commercial and industrial deployments of robot fleets often fall back on remote human teleoperators during execution when robots are at risk or unable to make task progress. With continual learning, interventions from the remote pool of humans can also be used to improve the robot fleet control policy over time. A central question is how to effectively allocate limited human attention to individual robots. Prior work addresses this in the single-robot, single-human setting. We formalize the Interactive Fleet Learning (IFL) setting, in which multiple robots interactively query and learn from multiple human supervisors. We present a fully implemented open-source IFL benchmark suite of GPU-accelerated Isaac Gym environments for the evaluation of IFL algorithms. We propose Fleet-DAgger, a family of IFL algorithms, and compare a novel Fleet-DAgger algorithm to 4 baselines in simulation. We also perform 1000 trials of a physical block-pushing experiment with 4 ABB YuMi robot arms. Experiments suggest that the allocation of humans to robots significantly affects robot fleet performance, and that our algorithm achieves up to 8.8x higher return on human effort than baselines. See https://tinyurl.com/fleet-dagger for code, videos, and supplemental material.
All You Need is LUV: Unsupervised Collection of Labeled Images using Invisible UV Fluorescent Indicators
Mar 13, 2022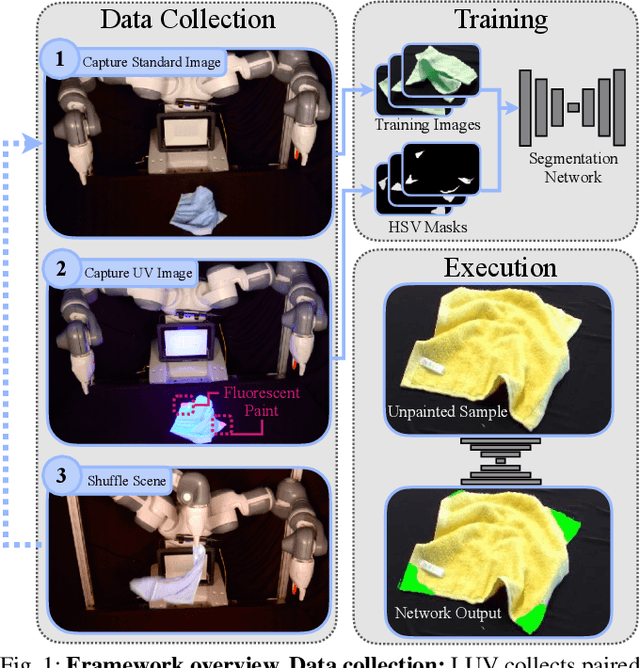
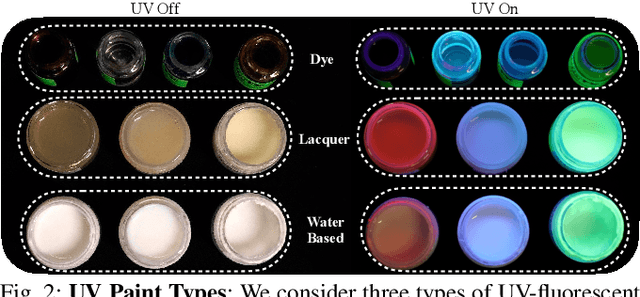
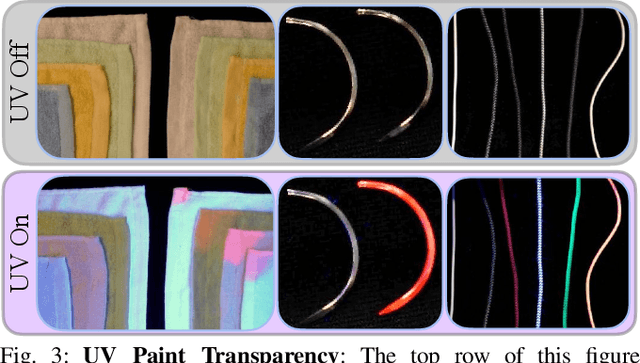
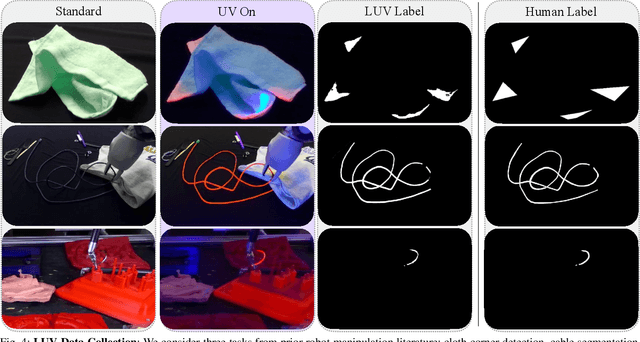
Large-scale semantic image annotation is a significant challenge for learning-based perception systems in robotics. Current approaches often rely on human labelers, which can be expensive, or simulation data, which can visually or physically differ from real data. This paper proposes Labels from UltraViolet (LUV), a novel framework that enables rapid, labeled data collection in real manipulation environments without human labeling. LUV uses transparent, ultraviolet-fluorescent paint with programmable ultraviolet LEDs to collect paired images of a scene in standard lighting and UV lighting to autonomously extract segmentation masks and keypoints via color segmentation. We apply LUV to a suite of diverse robot perception tasks to evaluate its labeling quality, flexibility, and data collection rate. Results suggest that LUV is 180-2500 times faster than a human labeler across the tasks. We show that LUV provides labels consistent with human annotations on unpainted test images. The networks trained on these labels are used to smooth and fold crumpled towels with 83% success rate and achieve 1.7mm position error with respect to human labels on a surgical needle pose estimation task. The low cost of LUV makes it ideal as a lightweight replacement for human labeling systems, with the one-time setup costs at $300 equivalent to the cost of collecting around 200 semantic segmentation labels on Amazon Mechanical Turk. Code, datasets, visualizations, and supplementary material can be found at https://sites.google.com/berkeley.edu/luv
Learning to Localize, Grasp, and Hand Over Unmodified Surgical Needles
Dec 08, 2021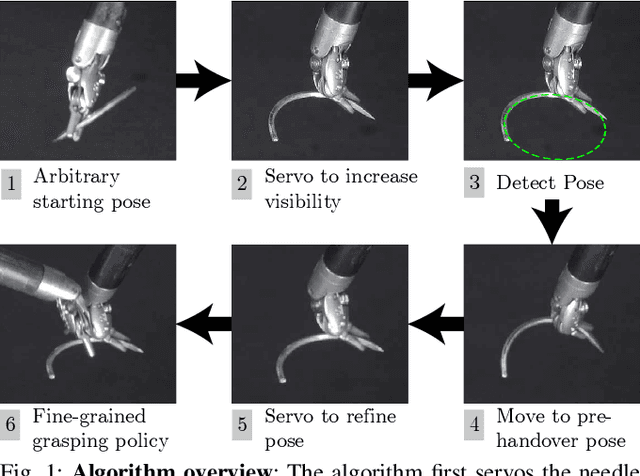
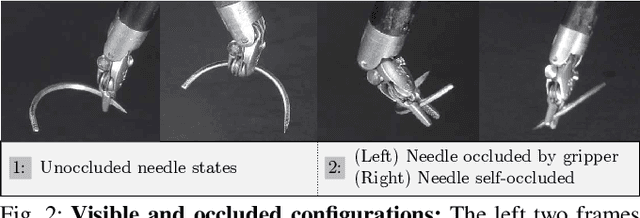
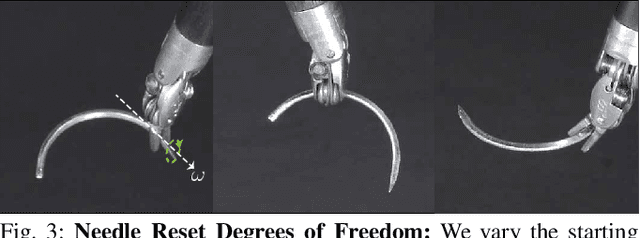
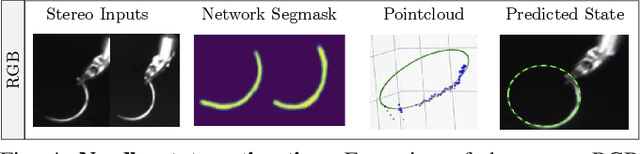
Robotic Surgical Assistants (RSAs) are commonly used to perform minimally invasive surgeries by expert surgeons. However, long procedures filled with tedious and repetitive tasks such as suturing can lead to surgeon fatigue, motivating the automation of suturing. As visual tracking of a thin reflective needle is extremely challenging, prior work has modified the needle with nonreflective contrasting paint. As a step towards automation of a suturing subtask without modifying the needle, we propose HOUSTON: Handoff of Unmodified, Surgical, Tool-Obstructed Needles, a problem and algorithm that uses a learned active sensing policy with a stereo camera to localize and align the needle into a visible and accessible pose for the other arm. To compensate for robot positioning and needle perception errors, the algorithm then executes a high-precision grasping motion that uses multiple cameras. In physical experiments using the da Vinci Research Kit (dVRK), HOUSTON successfully passes unmodified surgical needles with a success rate of 96.7% and is able to perform handover sequentially between the arms 32.4 times on average before failure. On needles unseen in training, HOUSTON achieves a success rate of 75 - 92.9%. To our knowledge, this work is the first to study handover of unmodified surgical needles. See https://tinyurl.com/houston-surgery for additional materials.
MESA: Offline Meta-RL for Safe Adaptation and Fault Tolerance
Dec 07, 2021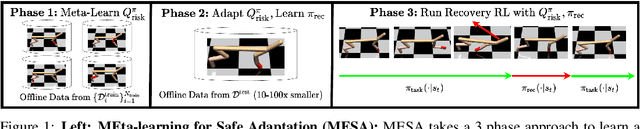
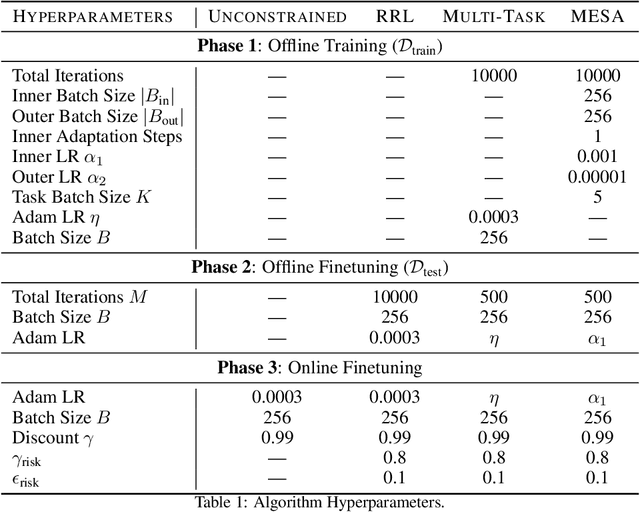
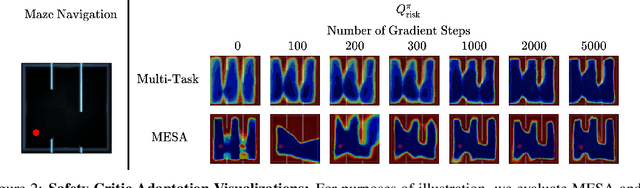

Safe exploration is critical for using reinforcement learning (RL) in risk-sensitive environments. Recent work learns risk measures which measure the probability of violating constraints, which can then be used to enable safety. However, learning such risk measures requires significant interaction with the environment, resulting in excessive constraint violations during learning. Furthermore, these measures are not easily transferable to new environments. We cast safe exploration as an offline meta-RL problem, where the objective is to leverage examples of safe and unsafe behavior across a range of environments to quickly adapt learned risk measures to a new environment with previously unseen dynamics. We then propose MEta-learning for Safe Adaptation (MESA), an approach for meta-learning a risk measure for safe RL. Simulation experiments across 5 continuous control domains suggest that MESA can leverage offline data from a range of different environments to reduce constraint violations in unseen environments by up to a factor of 2 while maintaining task performance. See https://tinyurl.com/safe-meta-rl for code and supplementary material.
LS3: Latent Space Safe Sets for Long-Horizon Visuomotor Control of Iterative Tasks
Jul 10, 2021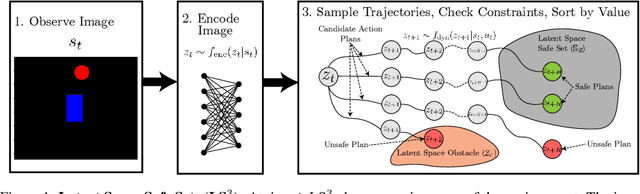


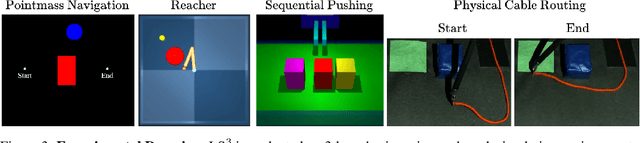
Reinforcement learning (RL) algorithms have shown impressive success in exploring high-dimensional environments to learn complex, long-horizon tasks, but can often exhibit unsafe behaviors and require extensive environment interaction when exploration is unconstrained. A promising strategy for safe learning in dynamically uncertain environments is requiring that the agent can robustly return to states where task success (and therefore safety) can be guaranteed. While this approach has been successful in low-dimensions, enforcing this constraint in environments with high-dimensional state spaces, such as images, is challenging. We present Latent Space Safe Sets (LS3), which extends this strategy to iterative, long-horizon tasks with image observations by using suboptimal demonstrations and a learned dynamics model to restrict exploration to the neighborhood of a learned Safe Set where task completion is likely. We evaluate LS3 on 4 domains, including a challenging sequential pushing task in simulation and a physical cable routing task. We find that LS3 can use prior task successes to restrict exploration and learn more efficiently than prior algorithms while satisfying constraints. See https://tinyurl.com/latent-ss for code and supplementary material.
SimNet: Enabling Robust Unknown Object Manipulation from Pure Synthetic Data via Stereo
Jun 30, 2021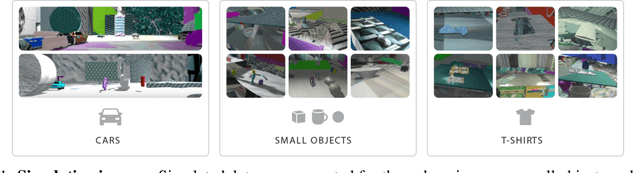
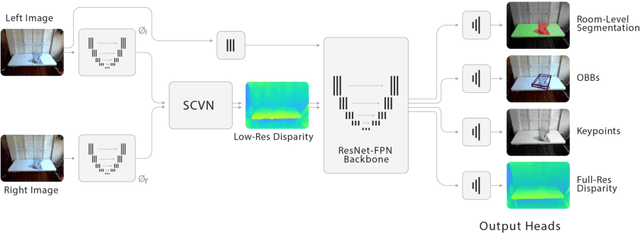

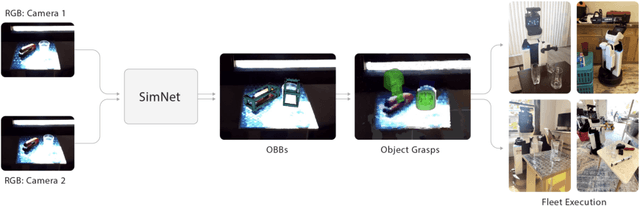
Robot manipulation of unknown objects in unstructured environments is a challenging problem due to the variety of shapes, materials, arrangements and lighting conditions. Even with large-scale real-world data collection, robust perception and manipulation of transparent and reflective objects across various lighting conditions remain challenging. To address these challenges we propose an approach to performing sim-to-real transfer of robotic perception. The underlying model, SimNet, is trained as a single multi-headed neural network using simulated stereo data as input and simulated object segmentation masks, 3D oriented bounding boxes (OBBs), object keypoints, and disparity as output. A key component of SimNet is the incorporation of a learned stereo sub-network that predicts disparity. SimNet is evaluated on 2D car detection, unknown object detection, and deformable object keypoint detection and significantly outperforms a baseline that uses a structured light RGB-D sensor. By inferring grasp positions using the OBB and keypoint predictions, SimNet can be used to perform end-to-end manipulation of unknown objects in both easy and hard scenarios using our fleet of Toyota HSR robots in four home environments. In unknown object grasping experiments, the predictions from the baseline RGB-D network and SimNet enable successful grasps of most of the easy objects. However, the RGB-D baseline only grasps 35% of the hard (e.g., transparent) objects, while SimNet grasps 95%, suggesting that SimNet can enable robust manipulation of unknown objects, including transparent objects, in unknown environments.
Untangling Dense Non-Planar Knots by Learning Manipulation Features and Recovery Policies
Jun 29, 2021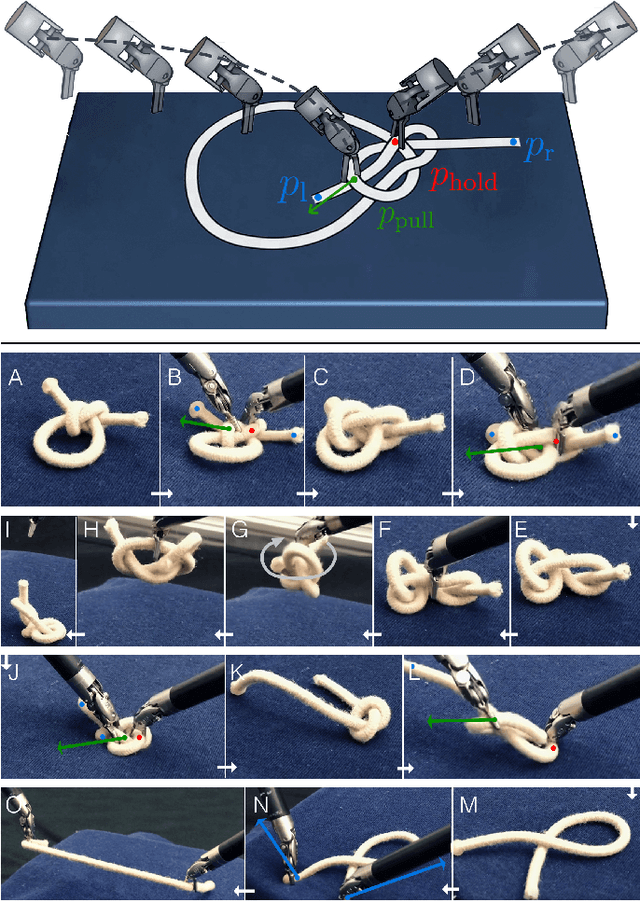
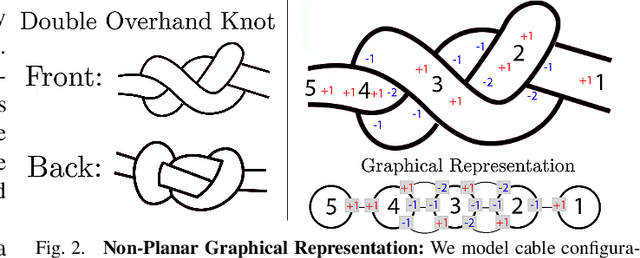
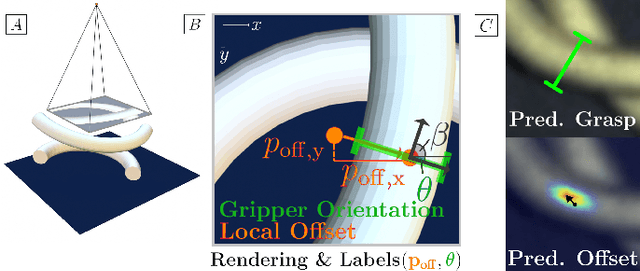
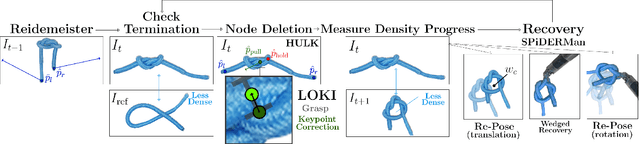
Robot manipulation for untangling 1D deformable structures such as ropes, cables, and wires is challenging due to their infinite dimensional configuration space, complex dynamics, and tendency to self-occlude. Analytical controllers often fail in the presence of dense configurations, due to the difficulty of grasping between adjacent cable segments. We present two algorithms that enhance robust cable untangling, LOKI and SPiDERMan, which operate alongside HULK, a high-level planner from prior work. LOKI uses a learned model of manipulation features to refine a coarse grasp keypoint prediction to a precise, optimized location and orientation, while SPiDERMan uses a learned model to sense task progress and apply recovery actions. We evaluate these algorithms in physical cable untangling experiments with 336 knots and over 1500 actions on real cables using the da Vinci surgical robot. We find that the combination of HULK, LOKI, and SPiDERMan is able to untangle dense overhand, figure-eight, double-overhand, square, bowline, granny, stevedore, and triple-overhand knots. The composition of these methods successfully untangles a cable from a dense initial configuration in 68.3% of 60 physical experiments and achieves 50% higher success rates than baselines from prior work. Supplementary material, code, and videos can be found at https://tinyurl.com/rssuntangling.
PAC Best Arm Identification Under a Deadline
Jun 08, 2021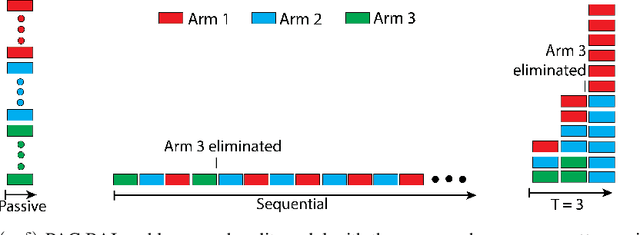
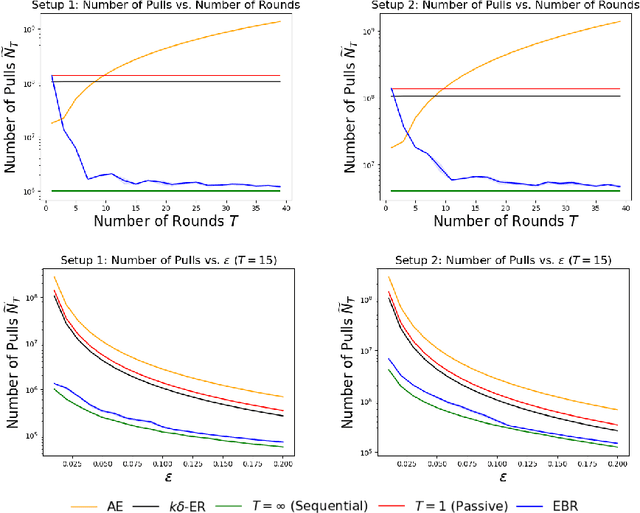
We study $(\epsilon, \delta)$-PAC best arm identification, where a decision-maker must identify an $\epsilon$-optimal arm with probability at least $1 - \delta$, while minimizing the number of arm pulls (samples). Most of the work on this topic is in the sequential setting, where there is no constraint on the time taken to identify such an arm; this allows the decision-maker to pull one arm at a time. In this work, the decision-maker is given a deadline of $T$ rounds, where, on each round, it can adaptively choose which arms to pull and how many times to pull them; this distinguishes the number of decisions made (i.e., time or number of rounds) from the number of samples acquired (cost). Such situations occur in clinical trials, where one may need to identify a promising treatment under a deadline while minimizing the number of test subjects, or in simulation-based studies run on the cloud, where we can elastically scale up or down the number of virtual machines to conduct as many experiments as we wish, but need to pay for the resource-time used. As the decision-maker can only make $T$ decisions, she may need to pull some arms excessively relative to a sequential algorithm in order to perform well on all possible problems. We formalize this added difficulty with two hardness results that indicate that unlike sequential settings, the ability to adapt to the problem difficulty is constrained by the finite deadline. We propose Elastic Batch Racing (EBR), a novel algorithm for this setting and bound its sample complexity, showing that EBR is optimal with respect to both hardness results. We present simulations evaluating EBR in this setting, where it outperforms baselines by several orders of magnitude.
Disentangling Dense Multi-Cable Knots
Jun 04, 2021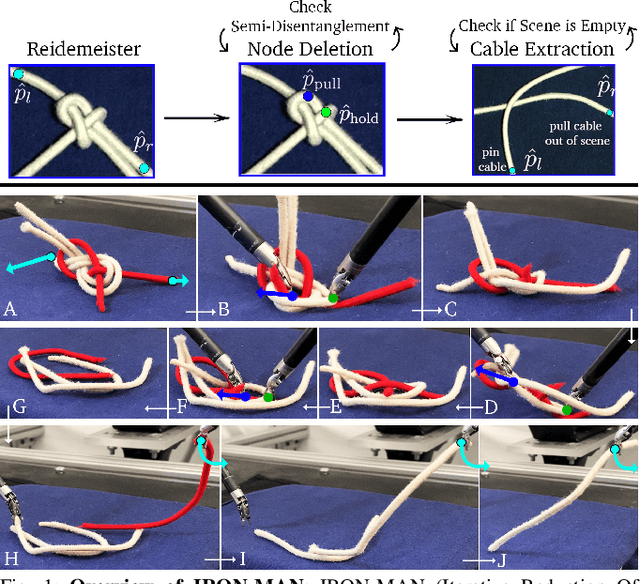
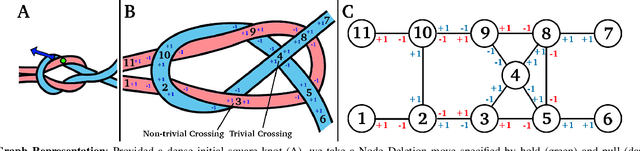
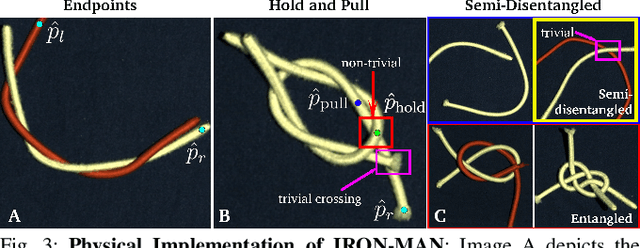
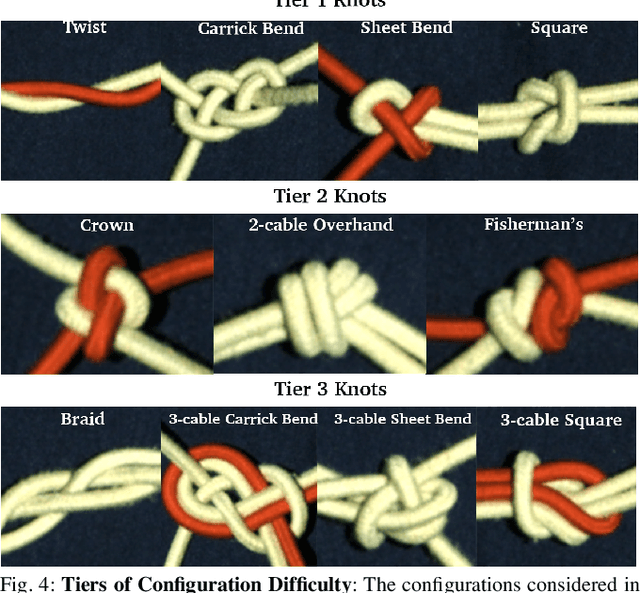
Disentangling two or more cables requires many steps to remove crossings between and within cables. We formalize the problem of disentangling multiple cables and present an algorithm, Iterative Reduction Of Non-planar Multiple cAble kNots (IRON-MAN), that outputs robot actions to remove crossings from multi-cable knotted structures. We instantiate this algorithm with a learned perception system, inspired by prior work in single-cable untying that given an image input, can disentangle two-cable twists, three-cable braids, and knots of two or three cables, such as overhand, square, carrick bend, sheet bend, crown, and fisherman's knots. IRON-MAN keeps track of task-relevant keypoints corresponding to target cable endpoints and crossings and iteratively disentangles the cables by identifying and undoing crossings that are critical to knot structure. Using a da Vinci surgical robot, we experimentally evaluate the effectiveness of IRON-MAN on untangling multi-cable knots of types that appear in the training data, as well as generalizing to novel classes of multi-cable knots. Results suggest that IRON-MAN is effective in disentangling knots involving up to three cables with 80.5% success and generalizing to knot types that are not present during training, with cables of both distinct or identical colors.