 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomously Untangling Long Cables
Paper and Code
Jul 16, 2022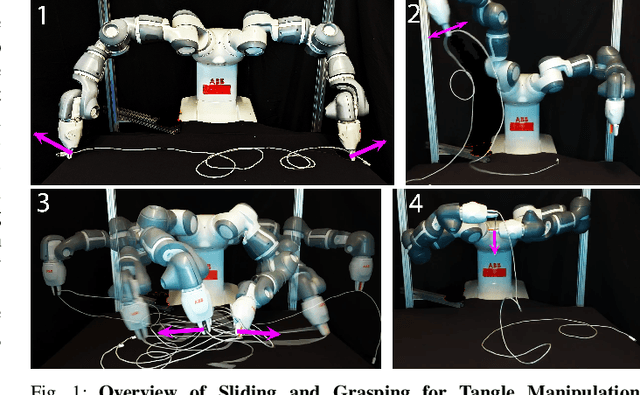
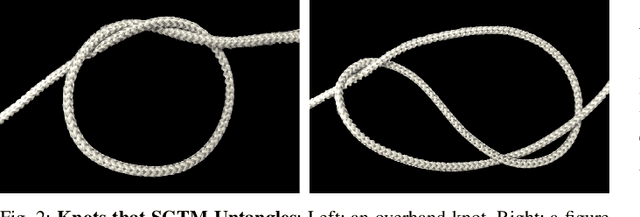
Cables are ubiquitous in many settings, but are prone to self-occlusions and knots, making them difficult to perceive and manipulate. The challenge often increases with cable length: long cables require more complex slack management and strategies to facilitate observability and reachability. In this paper, we focus on autonomously untangling cables up to 3 meters in length using a bilateral robot. We develop new motion primitives to efficiently untangle long cables and novel gripper jaws specialized for this task. We present Sliding and Grasping for Tangle Manipulation (SGTM), an algorithm that composes these primitives with RGBD vision to iteratively untangle. SGTM untangles cables with success rates of 67% on isolated overhand and figure eight knots and 50% on more complex configurations. Supplementary material, visualizations, and videos can be found at https://sites.google.com/view/rss-2022-untangling/home.