 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised Learning for Interactive Perception of Surgical Thread for Autonomous Suture Tail-Shortening
Jul 13, 2023



Accurate 3D sensing of suturing thread is a challenging problem in automated surgical suturing because of the high state-space complexity, thinness and deformability of the thread, and possibility of occlusion by the grippers and tissue. In this work we present a method for tracking surgical thread in 3D which is robust to occlusions and complex thread configurations, and apply it to autonomously perform the surgical suture "tail-shortening" task: pulling thread through tissue until a desired "tail" length remains exposed. The method utilizes a learned 2D surgical thread detection network to segment suturing thread in RGB images. It then identifies the thread path in 2D and reconstructs the thread in 3D as a NURBS spline by triangulating the detections from two stereo cameras. Once a 3D thread model is initialized, the method tracks the thread across subsequent frames. Experiments suggest the method achieves a 1.33 pixel average reprojection error on challenging single-frame 3D thread reconstructions, and an 0.84 pixel average reprojection error on two tracking sequences. On the tail-shortening task, it accomplishes a 90% success rate across 20 trials. Supplemental materials are available at https://sites.google.com/berkeley.edu/autolab-surgical-thread/ .
Learning to Trace and Untangle Semi-planar Knots
Mar 15, 2023



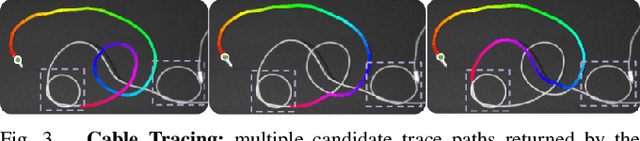
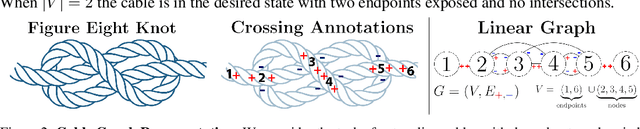
This paper extends prior work on untangling long cables and presents TUSK (Tracing to Untangle Semi-planar Knots), a learned cable-tracing algorithm that resolves over-crossings and undercrossings to recognize the structure of knots and grasp points for untangling from a single RGB image. This work focuses on semi-planar knots, which are knots composed of crossings that each include at most 2 cable segments. We conduct experiments on long cables (3 m in length) with up to 15 semi-planar crossings across 6 different knot types. Crops of crossings from 3 knots (overhand, figure 8, and bowline) of the 6 are seen during training, but none of the full knots are seen during training. This is an improvement from prior work on long cables that can only untangle 2 knot types. Experiments find that in settings with multiple identical cables, TUSK can trace a single cable with 81% accuracy on 7 new knot types. In single-cable images, TUSK can trace and identify the correct knot with 77% success on 3 new knot types. We incorporate TUSK into a bimanual robot system and find that it successfully untangles 64% of cable configurations, including those with new knots unseen during training, across 3 levels of difficulty. Supplementary material, including an annotated dataset of 500 RGB-D images of a knotted cable along with ground-truth traces, can be found at https://sites.google.com/view/tusk-rss.
SGTM 2.0: Autonomously Untangling Long Cables using Interactive Perception
Sep 27, 2022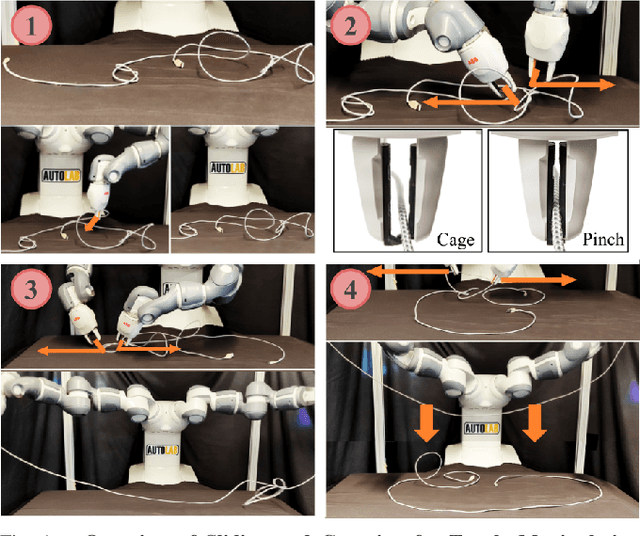

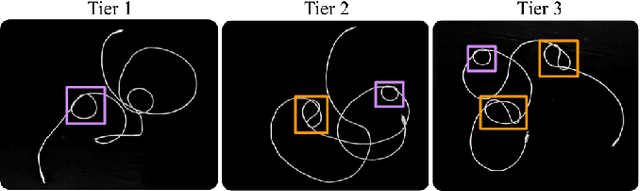
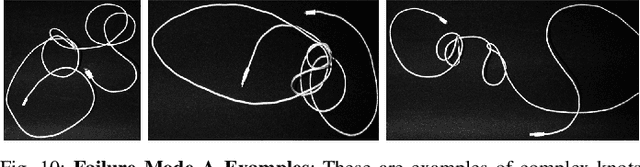
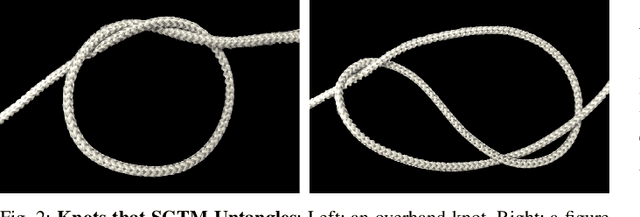
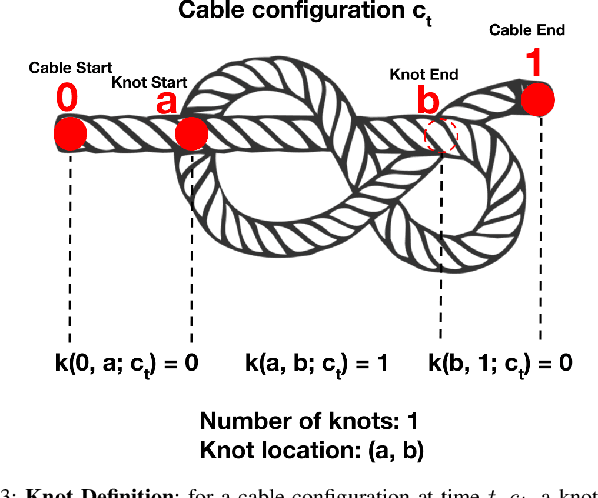
Cables are commonplace in homes, hospitals, and industrial warehouses and are prone to tangling. This paper extends prior work on autonomously untangling long cables by introducing novel uncertainty quantification metrics and actions that interact with the cable to reduce perception uncertainty. We present Sliding and Grasping for Tangle Manipulation 2.0 (SGTM 2.0), a system that autonomously untangles cables approximately 3 meters in length with a bilateral robot using estimates of uncertainty at each step to inform actions. By interactively reducing uncertainty, Sliding and Grasping for Tangle Manipulation 2.0 (SGTM 2.0) reduces the number of state-resetting moves it must take, significantly speeding up run-time. Experiments suggest that SGTM 2.0 can achieve 83% untangling success on cables with 1 or 2 overhand and figure-8 knots, and 70% termination detection success across these configurations, outperforming SGTM 1.0 by 43% in untangling accuracy and 200% in full rollout speed. Supplementary material, visualizations, and videos can be found at sites.google.com/view/sgtm2.
Autonomously Untangling Long Cables
Jul 16, 2022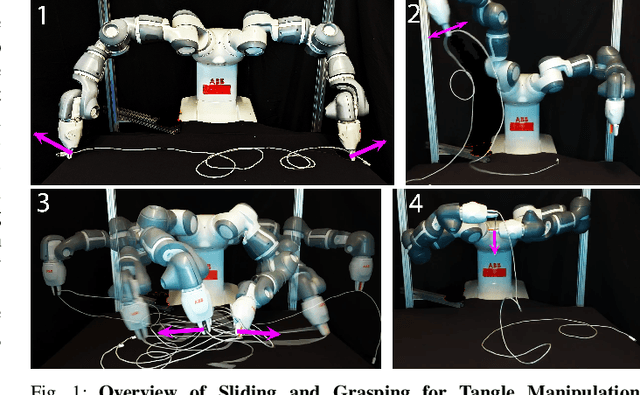
Cables are ubiquitous in many settings, but are prone to self-occlusions and knots, making them difficult to perceive and manipulate. The challenge often increases with cable length: long cables require more complex slack management and strategies to facilitate observability and reachability. In this paper, we focus on autonomously untangling cables up to 3 meters in length using a bilateral robot. We develop new motion primitives to efficiently untangle long cables and novel gripper jaws specialized for this task. We present Sliding and Grasping for Tangle Manipulation (SGTM), an algorithm that composes these primitives with RGBD vision to iteratively untangle. SGTM untangles cables with success rates of 67% on isolated overhand and figure eight knots and 50% on more complex configurations. Supplementary material, visualizations, and videos can be found at https://sites.google.com/view/rss-2022-untangling/home.
Learning Switching Criteria for Sim2Real Transfer of Robotic Fabric Manipulation Policies
Jul 02, 2022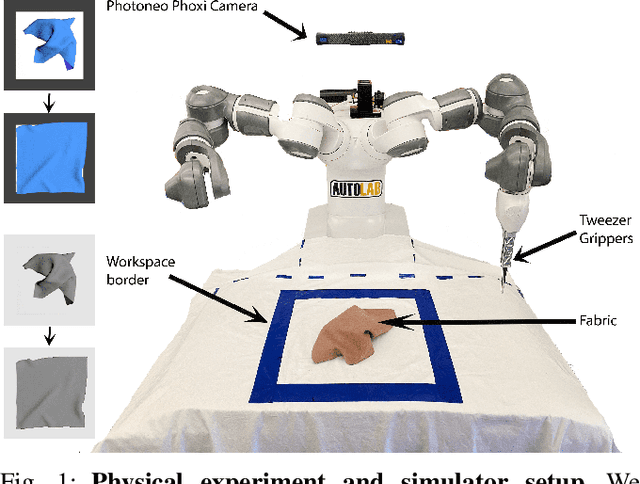
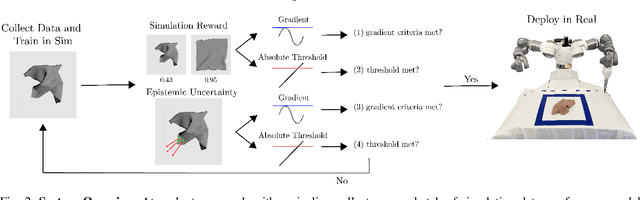
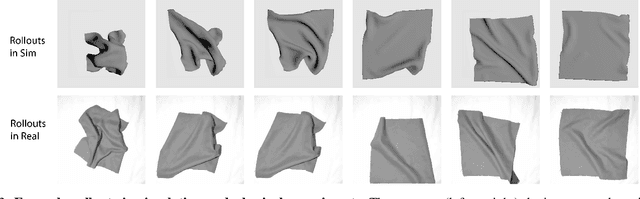
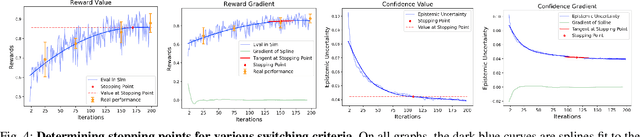
Simulation-to-reality transfer has emerged as a popular and highly successful method to train robotic control policies for a wide variety of tasks. However, it is often challenging to determine when policies trained in simulation are ready to be transferred to the physical world. Deploying policies that have been trained with very little simulation data can result in unreliable and dangerous behaviors on physical hardware. On the other hand, excessive training in simulation can cause policies to overfit to the visual appearance and dynamics of the simulator. In this work, we study strategies to automatically determine when policies trained in simulation can be reliably transferred to a physical robot. We specifically study these ideas in the context of robotic fabric manipulation, in which successful sim2real transfer is especially challenging due to the difficulties of precisely modeling the dynamics and visual appearance of fabric. Results in a fabric smoothing task suggest that our switching criteria correlate well with performance in real. In particular, our confidence-based switching criteria achieve average final fabric coverage of 87.2-93.7% within 55-60% of the total training budget. See https://tinyurl.com/lsc-case for code and supplemental materials.
Disentangling Dense Multi-Cable Knots
Jun 04, 2021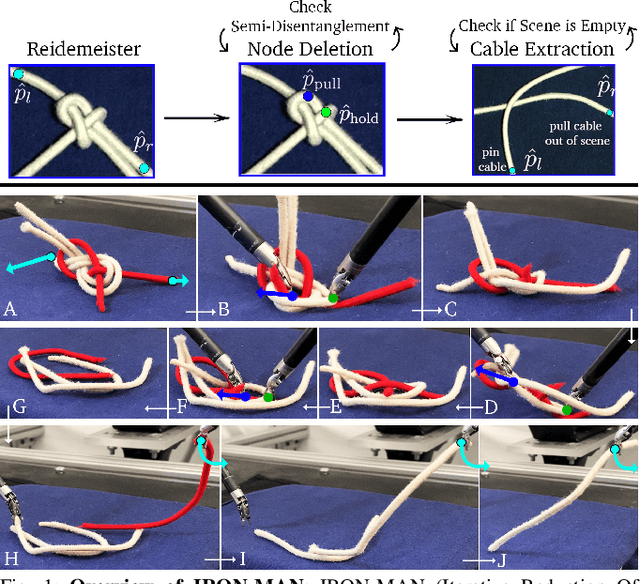
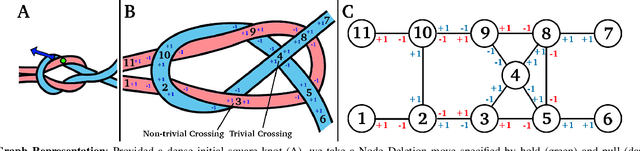
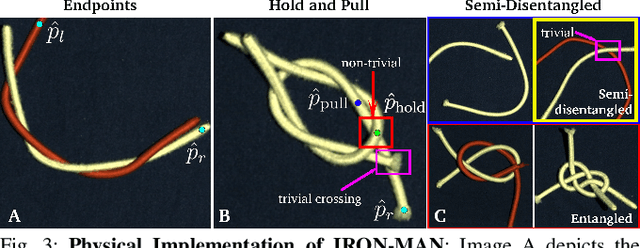
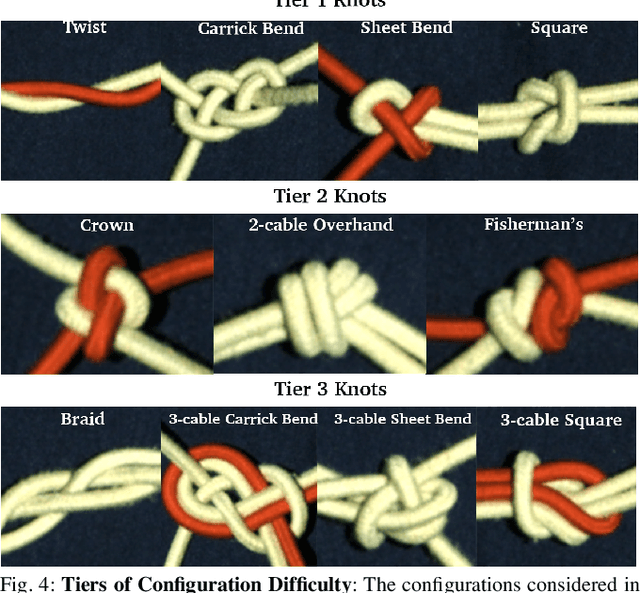
Disentangling two or more cables requires many steps to remove crossings between and within cables. We formalize the problem of disentangling multiple cables and present an algorithm, Iterative Reduction Of Non-planar Multiple cAble kNots (IRON-MAN), that outputs robot actions to remove crossings from multi-cable knotted structures. We instantiate this algorithm with a learned perception system, inspired by prior work in single-cable untying that given an image input, can disentangle two-cable twists, three-cable braids, and knots of two or three cables, such as overhand, square, carrick bend, sheet bend, crown, and fisherman's knots. IRON-MAN keeps track of task-relevant keypoints corresponding to target cable endpoints and crossings and iteratively disentangles the cables by identifying and undoing crossings that are critical to knot structure. Using a da Vinci surgical robot, we experimentally evaluate the effectiveness of IRON-MAN on untangling multi-cable knots of types that appear in the training data, as well as generalizing to novel classes of multi-cable knots. Results suggest that IRON-MAN is effective in disentangling knots involving up to three cables with 80.5% success and generalizing to knot types that are not present during training, with cables of both distinct or identical colors.
Untangling Dense Knots by Learning Task-Relevant Keypoints
Nov 10, 2020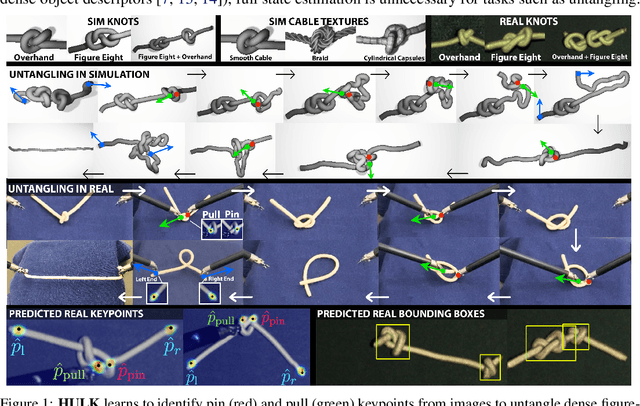
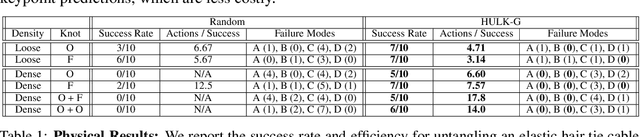
Untangling ropes, wires, and cables is a challenging task for robots due to the high-dimensional configuration space, visual homogeneity, self-occlusions, and complex dynamics. We consider dense (tight) knots that lack space between self-intersections and present an iterative approach that uses learned geometric structure in configurations. We instantiate this into an algorithm, HULK: Hierarchical Untangling from Learned Keypoints, which combines learning-based perception with a geometric planner into a policy that guides a bilateral robot to untangle knots. To evaluate the policy, we perform experiments both in a novel simulation environment modelling cables with varied knot types and textures and in a physical system using the da Vinci surgical robot. We find that HULK is able to untangle cables with dense figure-eight and overhand knots and generalize to varied textures and appearances. We compare two variants of HULK to three baselines and observe that HULK achieves 43.3% higher success rates on a physical system compared to the next best baseline. HULK successfully untangles a cable from a dense initial configuration containing up to two overhand and figure-eight knots in 97.9% of 378 simulation experiments with an average of 12.1 actions per trial. In physical experiments, HULK achieves 61.7% untangling success, averaging 8.48 actions per trial. Supplementary material, code, and videos can be found at https://tinyurl.com/y3a88ycu.
* Conference on Robot Learning (CoRL) 2020 Oral. First two authors contributed equally