 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Busboy Problem: Efficient Tableware Decluttering Using Consolidation and Multi-Object Grasps
Jul 08, 2023



We present the "Busboy Problem": automating an efficient decluttering of cups, bowls, and silverware from a planar surface. As grasping and transporting individual items is highly inefficient, we propose policies to generate grasps for multiple items. We introduce the metric of Objects per Trip (OpT) carried by the robot to the collection bin to analyze the improvement seen as a result of our policies. In physical experiments with singulated items, we find that consolidation and multi-object grasps resulted in an 1.8x improvement in OpT, compared to methods without multi-object grasps. See https://sites.google.com/berkeley.edu/busboyproblem for code and supplemental materials.
Can Machines Garden? Systematically Comparing the AlphaGarden vs. Professional Horticulturalists
Jun 29, 2023



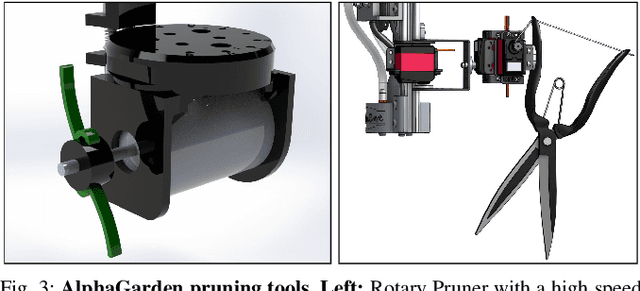
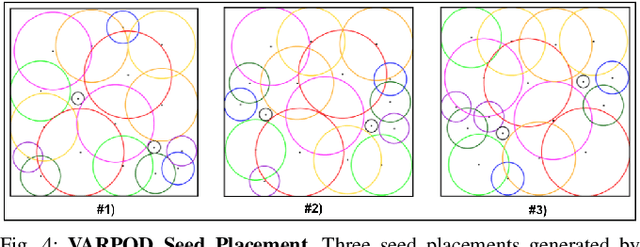
The AlphaGarden is an automated testbed for indoor polyculture farming which combines a first-order plant simulator, a gantry robot, a seed planting algorithm, plant phenotyping and tracking algorithms, irrigation sensors and algorithms, and custom pruning tools and algorithms. In this paper, we systematically compare the performance of the AlphaGarden to professional horticulturalists on the staff of the UC Berkeley Oxford Tract Greenhouse. The humans and the machine tend side-by-side polyculture gardens with the same seed arrangement. We compare performance in terms of canopy coverage, plant diversity, and water consumption. Results from two 60-day cycles suggest that the automated AlphaGarden performs comparably to professional horticulturalists in terms of coverage and diversity, and reduces water consumption by as much as 44%. Code, videos, and datasets are available at https://sites.google.com/berkeley.edu/systematiccomparison.
Automated Pruning of Polyculture Plants
Aug 22, 2022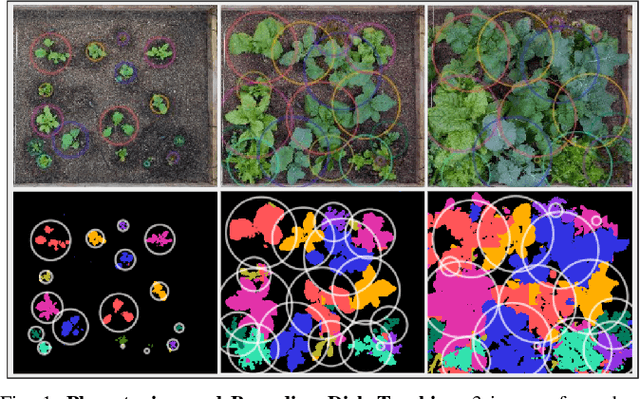
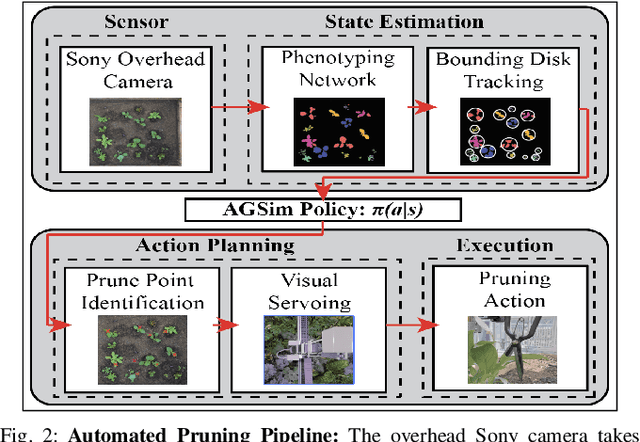
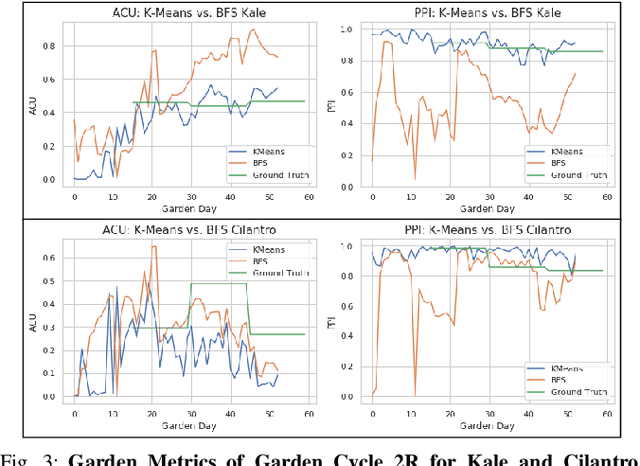

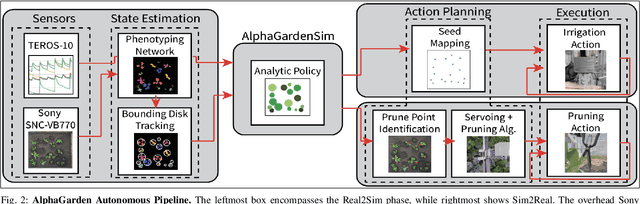
Polyculture farming has environmental advantages but requires substantially more pruning than monoculture farming. We present novel hardware and algorithms for automated pruning. Using an overhead camera to collect data from a physical scale garden testbed, the autonomous system utilizes a learned Plant Phenotyping convolutional neural network and a Bounding Disk Tracking algorithm to evaluate the individual plant distribution and estimate the state of the garden each day. From this garden state, AlphaGardenSim selects plants to autonomously prune. A trained neural network detects and targets specific prune points on the plant. Two custom-designed pruning tools, compatible with a FarmBot gantry system, are experimentally evaluated and execute autonomous cuts through controlled algorithms. We present results for four 60-day garden cycles. Results suggest the system can autonomously achieve 0.94 normalized plant diversity with pruning shears while maintaining an average canopy coverage of 0.84 by the end of the cycles. For code, videos, and datasets, see https://sites.google.com/berkeley.edu/pruningpolyculture.
Learning Switching Criteria for Sim2Real Transfer of Robotic Fabric Manipulation Policies
Jul 02, 2022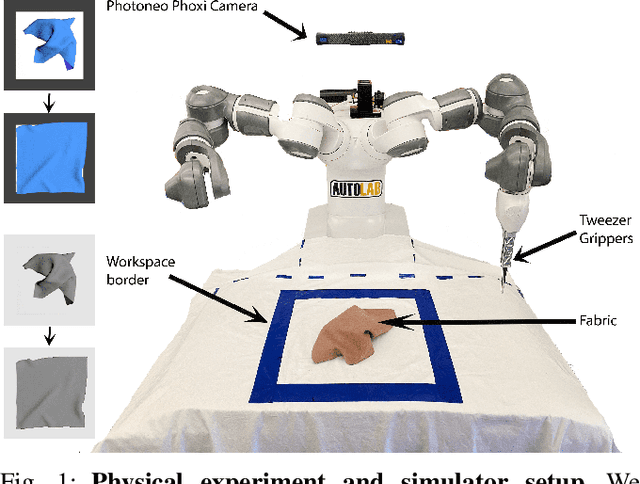
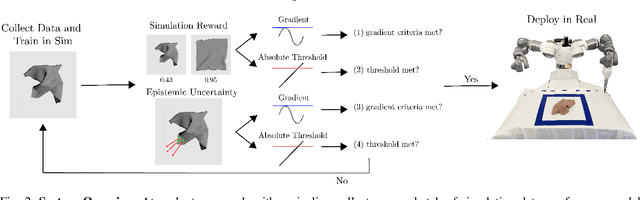
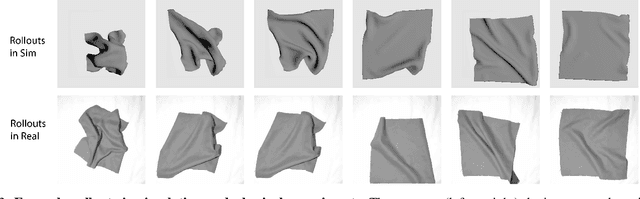
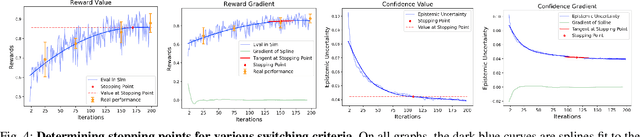
Simulation-to-reality transfer has emerged as a popular and highly successful method to train robotic control policies for a wide variety of tasks. However, it is often challenging to determine when policies trained in simulation are ready to be transferred to the physical world. Deploying policies that have been trained with very little simulation data can result in unreliable and dangerous behaviors on physical hardware. On the other hand, excessive training in simulation can cause policies to overfit to the visual appearance and dynamics of the simulator. In this work, we study strategies to automatically determine when policies trained in simulation can be reliably transferred to a physical robot. We specifically study these ideas in the context of robotic fabric manipulation, in which successful sim2real transfer is especially challenging due to the difficulties of precisely modeling the dynamics and visual appearance of fabric. Results in a fabric smoothing task suggest that our switching criteria correlate well with performance in real. In particular, our confidence-based switching criteria achieve average final fabric coverage of 87.2-93.7% within 55-60% of the total training budget. See https://tinyurl.com/lsc-case for code and supplemental materials.
AlphaGarden: Learning to Autonomously Tend a Polyculture Garden
Nov 11, 2021
This paper presents AlphaGarden: an autonomous polyculture garden that prunes and irrigates living plants in a 1.5m x 3.0m physical testbed. AlphaGarden uses an overhead camera and sensors to track the plant distribution and soil moisture. We model individual plant growth and interplant dynamics to train a policy that chooses actions to maximize leaf coverage and diversity. For autonomous pruning, AlphaGarden uses two custom-designed pruning tools and a trained neural network to detect prune points. We present results for four 60-day garden cycles. Results suggest AlphaGarden can autonomously achieve 0.96 normalized diversity with pruning shears while maintaining an average canopy coverage of 0.86 during the peak of the cycle. Code, datasets, and supplemental material can be found at https://github.com/BerkeleyAutomation/AlphaGarden.