 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlphaGarden: Learning to Autonomously Tend a Polyculture Garden
Nov 11, 2021
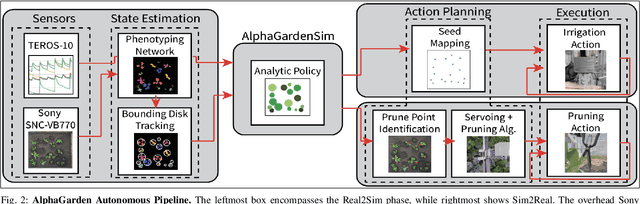
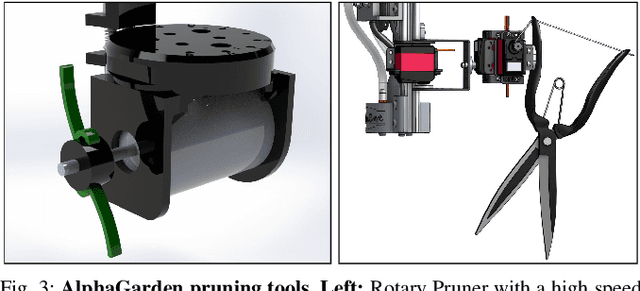
This paper presents AlphaGarden: an autonomous polyculture garden that prunes and irrigates living plants in a 1.5m x 3.0m physical testbed. AlphaGarden uses an overhead camera and sensors to track the plant distribution and soil moisture. We model individual plant growth and interplant dynamics to train a policy that chooses actions to maximize leaf coverage and diversity. For autonomous pruning, AlphaGarden uses two custom-designed pruning tools and a trained neural network to detect prune points. We present results for four 60-day garden cycles. Results suggest AlphaGarden can autonomously achieve 0.96 normalized diversity with pruning shears while maintaining an average canopy coverage of 0.86 during the peak of the cycle. Code, datasets, and supplemental material can be found at https://github.com/BerkeleyAutomation/AlphaGarden.