 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOXE-AugE: A Large-Scale Robot Augmentation of OXE for Scaling Cross-Embodiment Policy Learning
Dec 15, 2025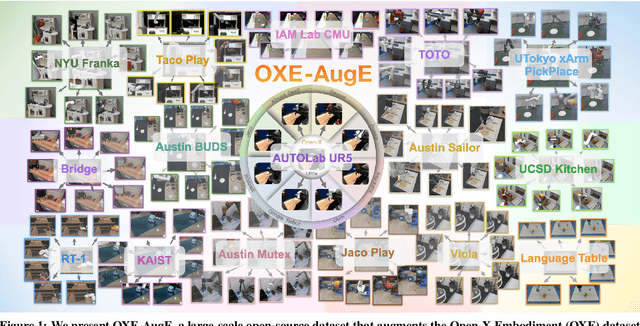
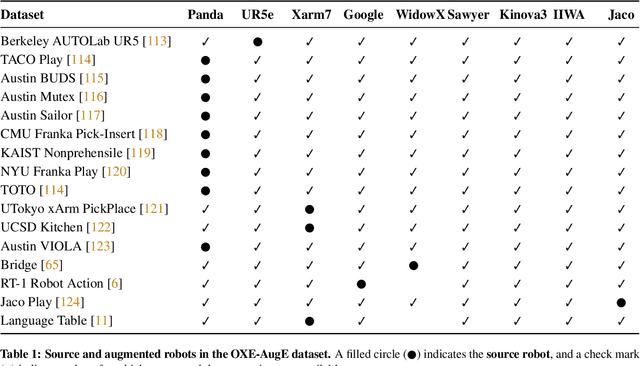
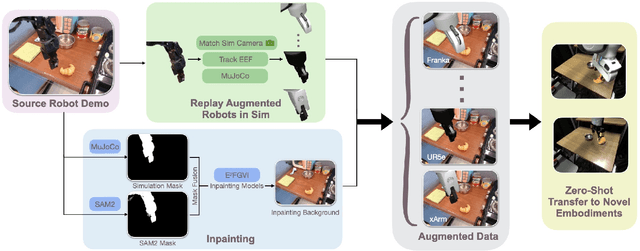
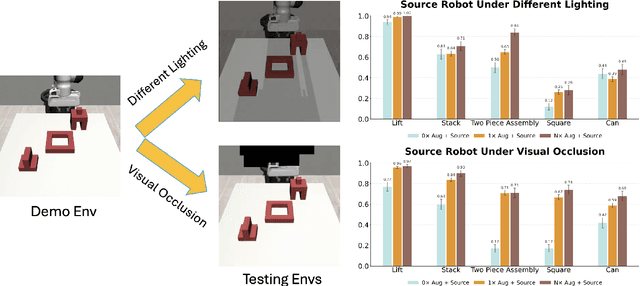
Large and diverse datasets are needed for training generalist robot policies that have potential to control a variety of robot embodiments -- robot arm and gripper combinations -- across diverse tasks and environments. As re-collecting demonstrations and retraining for each new hardware platform are prohibitively costly, we show that existing robot data can be augmented for transfer and generalization. The Open X-Embodiment (OXE) dataset, which aggregates demonstrations from over 60 robot datasets, has been widely used as the foundation for training generalist policies. However, it is highly imbalanced: the top four robot types account for over 85\% of its real data, which risks overfitting to robot-scene combinations. We present AugE-Toolkit, a scalable robot augmentation pipeline, and OXE-AugE, a high-quality open-source dataset that augments OXE with 9 different robot embodiments. OXE-AugE provides over 4.4 million trajectories, more than triple the size of the original OXE. We conduct a systematic study of how scaling robot augmentation impacts cross-embodiment learning. Results suggest that augmenting datasets with diverse arms and grippers improves policy performance not only on the augmented robots, but also on unseen robots and even the original robots under distribution shifts. In physical experiments, we demonstrate that state-of-the-art generalist policies such as OpenVLA and $π_0$ benefit from fine-tuning on OXE-AugE, improving success rates by 24-45% on previously unseen robot-gripper combinations across four real-world manipulation tasks. Project website: https://OXE-AugE.github.io/.
GrowSplat: Constructing Temporal Digital Twins of Plants with Gaussian Splats
May 16, 2025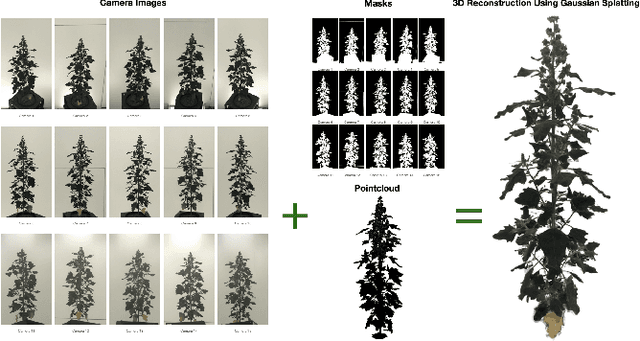

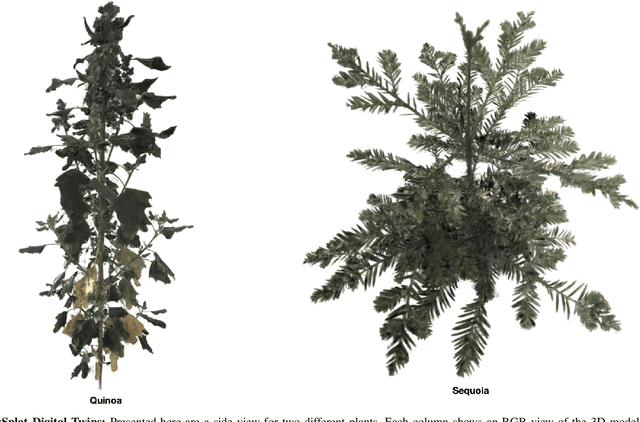
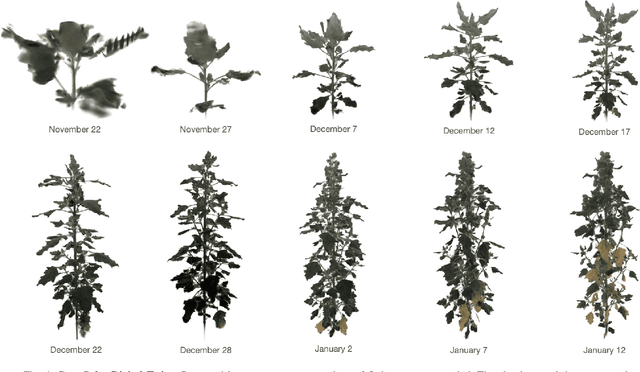
Accurate temporal reconstructions of plant growth are essential for plant phenotyping and breeding, yet remain challenging due to complex geometries, occlusions, and non-rigid deformations of plants. We present a novel framework for building temporal digital twins of plants by combining 3D Gaussian Splatting with a robust sample alignment pipeline. Our method begins by reconstructing Gaussian Splats from multi-view camera data, then leverages a two-stage registration approach: coarse alignment through feature-based matching and Fast Global Registration, followed by fine alignment with Iterative Closest Point. This pipeline yields a consistent 4D model of plant development in discrete time steps. We evaluate the approach on data from the Netherlands Plant Eco-phenotyping Center, demonstrating detailed temporal reconstructions of Sequoia and Quinoa species. Videos and Images can be seen at https://berkeleyautomation.github.io/GrowSplat/
Automating Deformable Gasket Assembly
Aug 22, 2024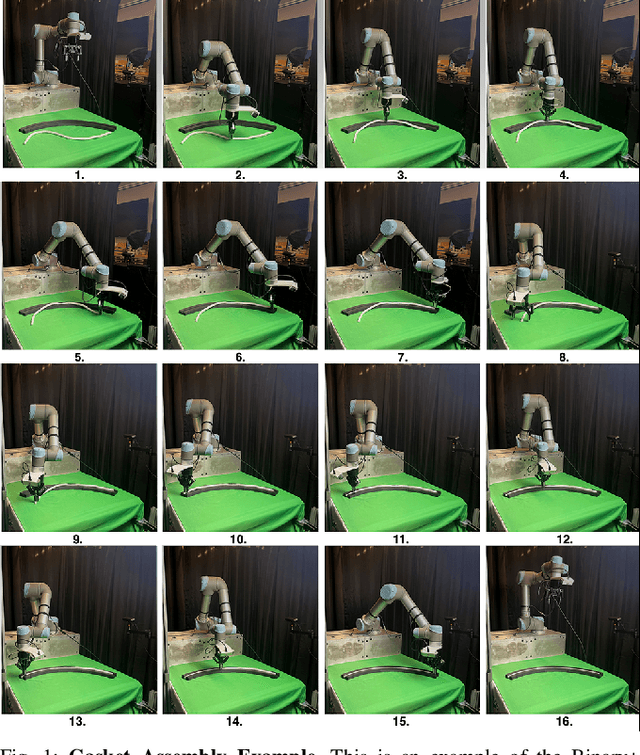
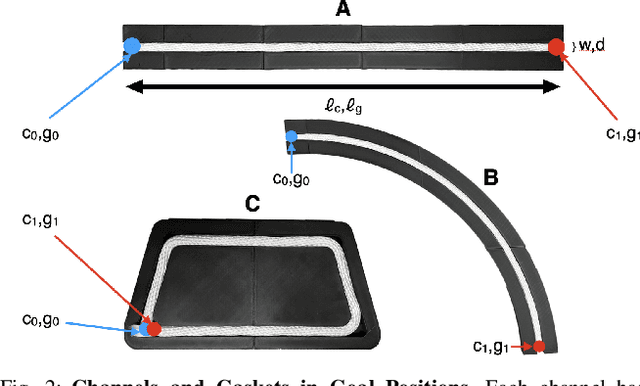
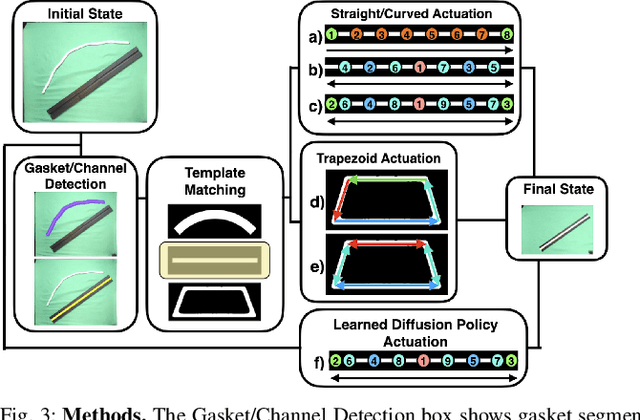
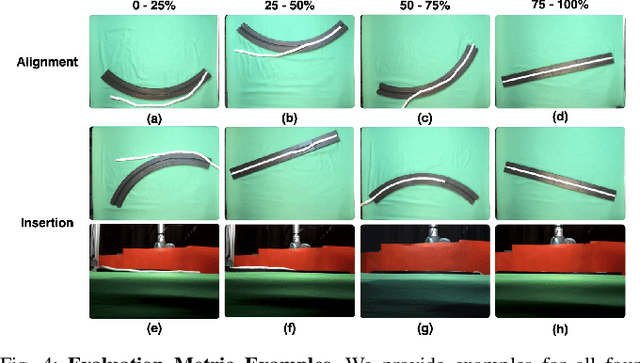
In Gasket Assembly, a deformable gasket must be aligned and pressed into a narrow channel. This task is common for sealing surfaces in the manufacturing of automobiles, appliances, electronics, and other products. Gasket Assembly is a long-horizon, high-precision task and the gasket must align with the channel and be fully pressed in to achieve a secure fit. To compare approaches, we present 4 methods for Gasket Assembly: one policy from deep imitation learning and three procedural algorithms. We evaluate these methods with 100 physical trials. Results suggest that the Binary+ algorithm succeeds in 10/10 on the straight channel whereas the learned policy based on 250 human teleoperated demonstrations succeeds in 8/10 trials and is significantly slower. Code, CAD models, videos, and data can be found at https://berkeleyautomation.github.io/robot-gasket/
FogROS2-Sky: Optimizing Latency and Cost for Multi-Cloud Robot Applications
Nov 09, 2023This paper studies the cost-performance tradeoffs in cloud robotics with heterogeneous cloud service providers, which have complex pricing models and varying application requirements. We present FogROS2-Sky, a cost-efficient open source robotics platform that offloads unmodified ROS2 applications to multiple cloud providers and enables fine-grained cost analysis for ROS2 applications' communication with multiple cloud providers. As each provider offers different options for CPU, GPU, memory, and latency, it can be very difficult for users to decide which to choose. FogROS2-Sky includes an optimization algorithm, which either finds the best available hardware specification that fulfills the user's latency and cost constraints or reports that such a specification does not exist. We use FogROS2-Sky to perform time-cost analysis on three robotics applications: visual SLAM, grasp planning, and motion planning. We are able to sample different hardware setups at nearly half the cost while still create cost and latency functions suitable for the optimizer. We also evaluate the optimizer's efficacy for these applications with the Pareto frontier and show that the optimizer selects efficient hardware configurations to balance cost and latency. Videos and code are available on the website https://sites.google.com/view/fogros2-sky
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
FogROS2-SGC: A ROS2 Cloud Robotics Platform for Secure Global Connectivity
Jun 29, 2023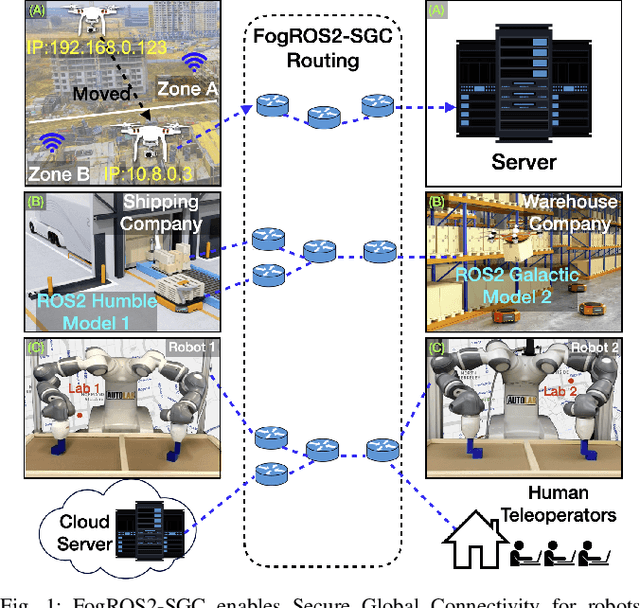
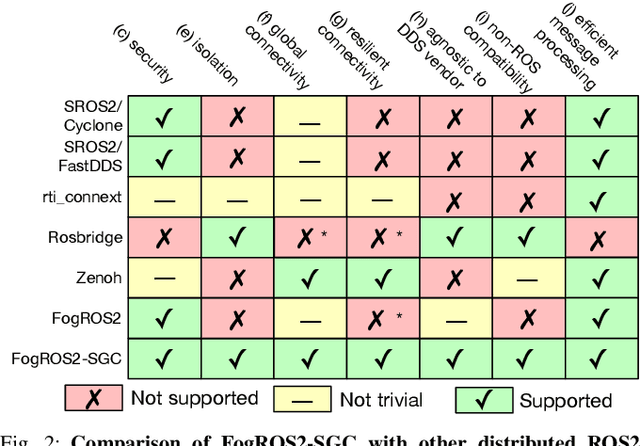
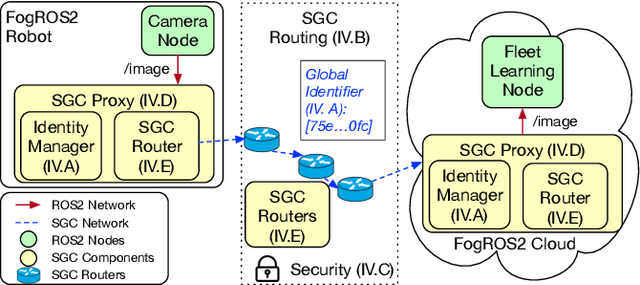
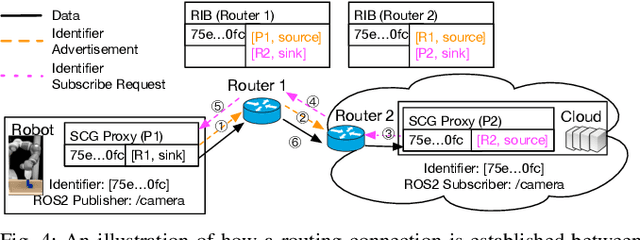
The Robot Operating System (ROS2) is the most widely used software platform for building robotics applications. FogROS2 extends ROS2 to allow robots to access cloud computing on demand. However, ROS2 and FogROS2 assume that all robots are locally connected and that each robot has full access and control of the other robots. With applications like distributed multi-robot systems, remote robot control, and mobile robots, robotics increasingly involves the global Internet and complex trust management. Existing approaches for connecting disjoint ROS2 networks lack key features such as security, compatibility, efficiency, and ease of use. We introduce FogROS2-SGC, an extension of FogROS2 that can effectively connect robot systems across different physical locations, networks, and Data Distribution Services (DDS). With globally unique and location-independent identifiers, FogROS2-SGC securely and efficiently routes data between robotics components around the globe. FogROS2-SGC is agnostic to the ROS2 distribution and configuration, is compatible with non-ROS2 software, and seamlessly extends existing ROS2 applications without any code modification. Experiments suggest FogROS2-SGC is 19x faster than rosbridge (a ROS2 package with comparable features, but lacking security). We also apply FogROS2-SGC to 4 robots and compute nodes that are 3600km apart. Videos and code are available on the project website https://sites.google.com/view/fogros2-sgc.
Can Machines Garden? Systematically Comparing the AlphaGarden vs. Professional Horticulturalists
Jun 29, 2023



The AlphaGarden is an automated testbed for indoor polyculture farming which combines a first-order plant simulator, a gantry robot, a seed planting algorithm, plant phenotyping and tracking algorithms, irrigation sensors and algorithms, and custom pruning tools and algorithms. In this paper, we systematically compare the performance of the AlphaGarden to professional horticulturalists on the staff of the UC Berkeley Oxford Tract Greenhouse. The humans and the machine tend side-by-side polyculture gardens with the same seed arrangement. We compare performance in terms of canopy coverage, plant diversity, and water consumption. Results from two 60-day cycles suggest that the automated AlphaGarden performs comparably to professional horticulturalists in terms of coverage and diversity, and reduces water consumption by as much as 44%. Code, videos, and datasets are available at https://sites.google.com/berkeley.edu/systematiccomparison.
DEFT: Diverse Ensembles for Fast Transfer in Reinforcement Learning
Sep 26, 2022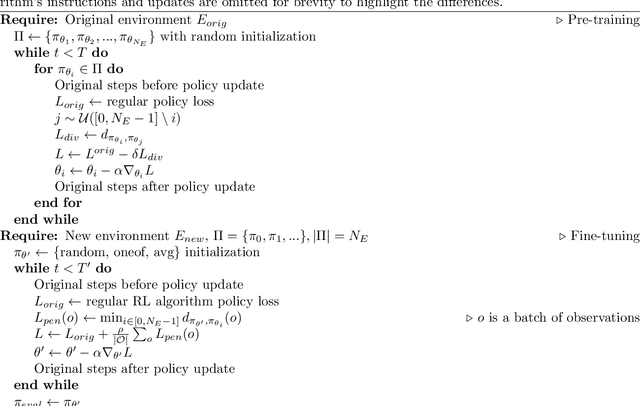
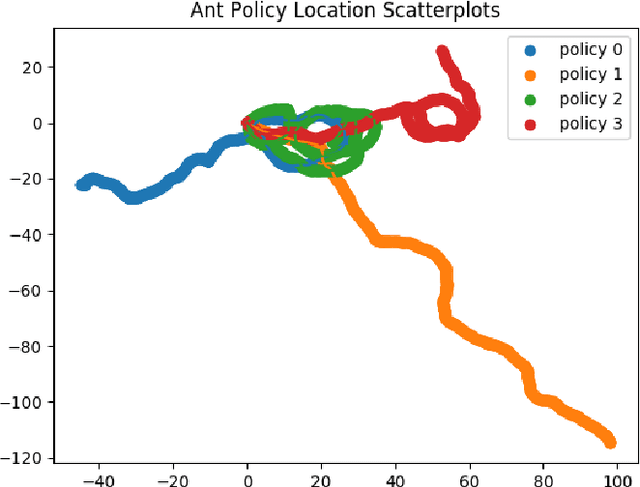
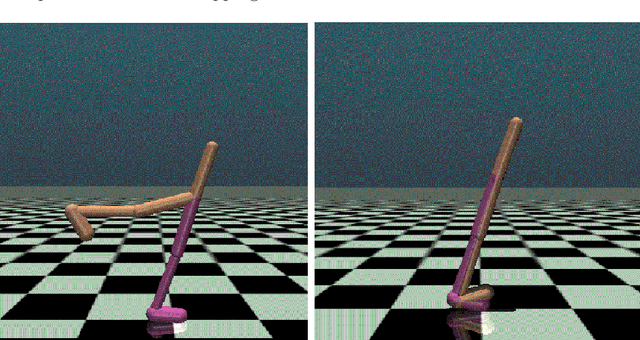
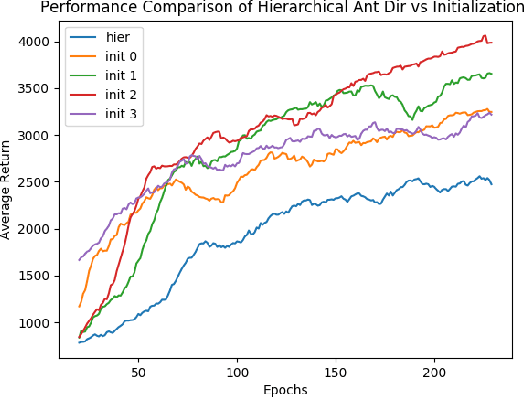
Deep ensembles have been shown to extend the positive effect seen in typical ensemble learning to neural networks and to reinforcement learning (RL). However, there is still much to be done to improve the efficiency of such ensemble models. In this work, we present Diverse Ensembles for Fast Transfer in RL (DEFT), a new ensemble-based method for reinforcement learning in highly multimodal environments and improved transfer to unseen environments. The algorithm is broken down into two main phases: training of ensemble members, and synthesis (or fine-tuning) of the ensemble members into a policy that works in a new environment. The first phase of the algorithm involves training regular policy gradient or actor-critic agents in parallel but adding a term to the loss that encourages these policies to differ from each other. This causes the individual unimodal agents to explore the space of optimal policies and capture more of the multimodality of the environment than a single actor could. The second phase of DEFT involves synthesizing the component policies into a new policy that works well in a modified environment in one of two ways. To evaluate the performance of DEFT, we start with a base version of the Proximal Policy Optimization (PPO) algorithm and extend it with the modifications for DEFT. Our results show that the pretraining phase is effective in producing diverse policies in multimodal environments. DEFT often converges to a high reward significantly faster than alternatives, such as random initialization without DEFT and fine-tuning of ensemble members. While there is certainly more work to be done to analyze DEFT theoretically and extend it to be even more robust, we believe it provides a strong framework for capturing multimodality in environments while still using RL methods with simple policy representations.
Automated Pruning of Polyculture Plants
Aug 22, 2022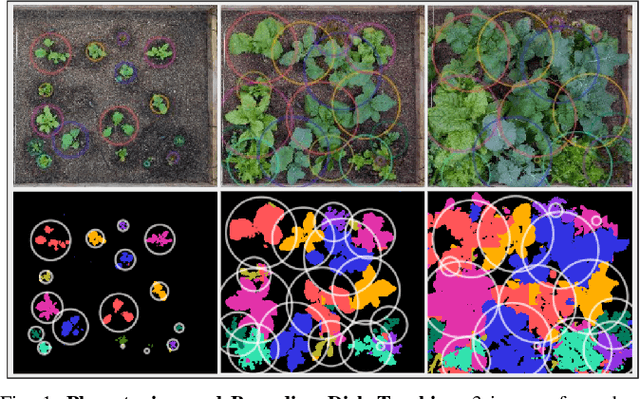
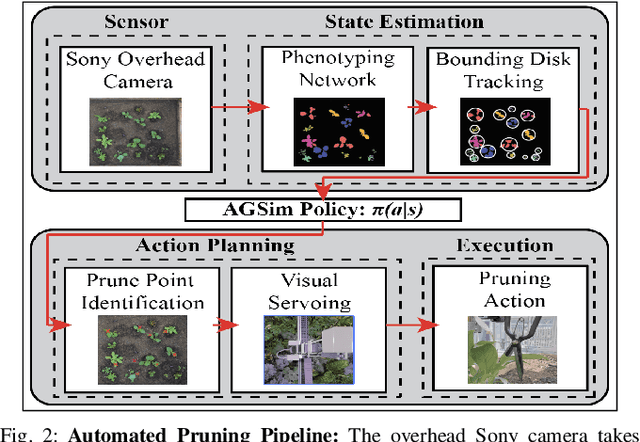
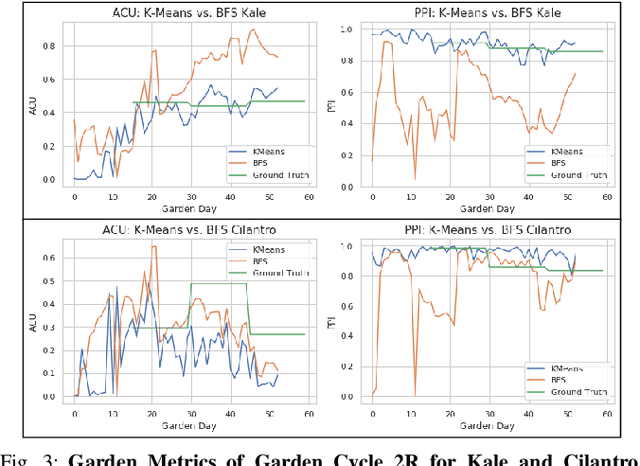

Polyculture farming has environmental advantages but requires substantially more pruning than monoculture farming. We present novel hardware and algorithms for automated pruning. Using an overhead camera to collect data from a physical scale garden testbed, the autonomous system utilizes a learned Plant Phenotyping convolutional neural network and a Bounding Disk Tracking algorithm to evaluate the individual plant distribution and estimate the state of the garden each day. From this garden state, AlphaGardenSim selects plants to autonomously prune. A trained neural network detects and targets specific prune points on the plant. Two custom-designed pruning tools, compatible with a FarmBot gantry system, are experimentally evaluated and execute autonomous cuts through controlled algorithms. We present results for four 60-day garden cycles. Results suggest the system can autonomously achieve 0.94 normalized plant diversity with pruning shears while maintaining an average canopy coverage of 0.84 by the end of the cycles. For code, videos, and datasets, see https://sites.google.com/berkeley.edu/pruningpolyculture.
FogROS 2: An Adaptive and Extensible Platform for Cloud and Fog Robotics Using ROS 2
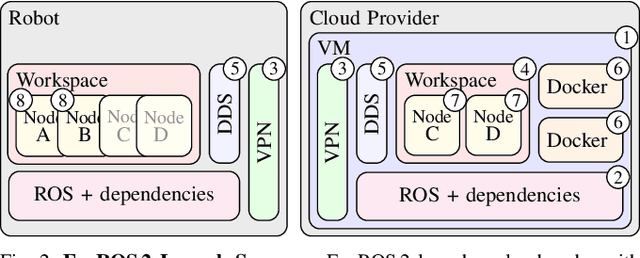
May 19, 2022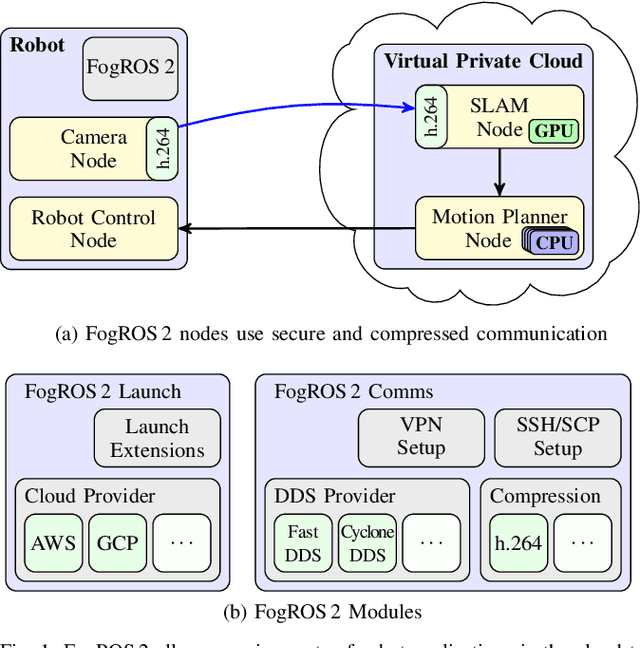
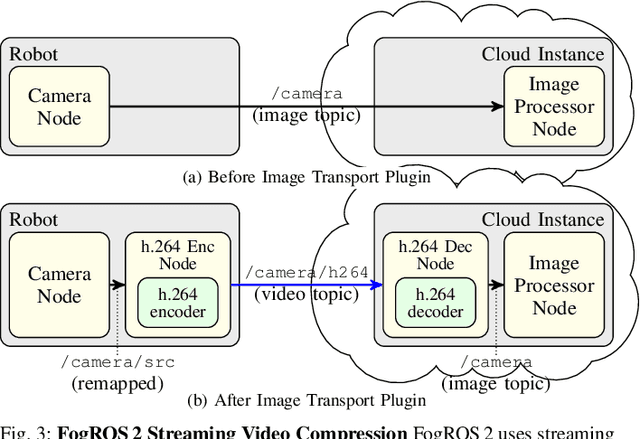
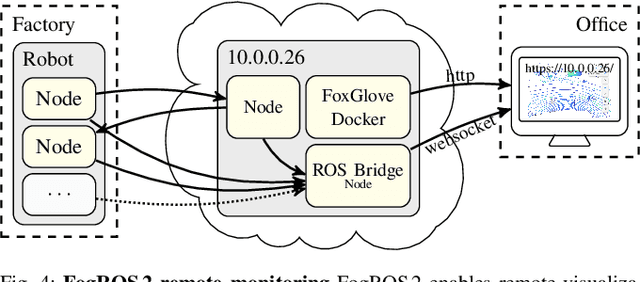
Mobility, power, and price points often dictate that robots do not have sufficient computing power on board to run modern robot algorithms at desired rates. Cloud computing providers such as AWS, GCP, and Azure offer immense computing power on demand, but tapping into that power from a robot is non-trivial. In this paper, we present FogROS 2, an easy-to-use, open-source platform to facilitate cloud and fog robotics compatible with the emerging ROS 2 standard, extending the open-source Robot Operating System (ROS). FogROS 2 provisions a cloud computer, deploys and launches ROS 2 nodes to the cloud computer, sets up secure networking between the robot and cloud, and starts the application running. FogROS 2 is completely redesigned and distinct from its predecessor to support ROS 2 applications, transparent video compression and communication, improved performance and security, support for multiple cloud-computing providers, and remote monitoring and visualization. We demonstrate in example applications that the performance gained by using cloud computers can overcome the network latency to significantly speed up robot performance. In examples, FogROS 2 reduces SLAM latency by 50%, reduces grasp planning time from 14s to 1.2s, and speeds up motion planning 28x. When compared to alternatives, FogROS 2 reduces network utilization by up to 3.8x. FogROS 2, source, examples, and documentation is available at https://github.com/BerkeleyAutomation/FogROS2 .