 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAVQA: A Latency-Aware Visual Question Answering Framework for Shared Autonomy in Self-Driving Vehicles
Nov 14, 2025When uncertainty is high, self-driving vehicles may halt for safety and benefit from the access to remote human operators who can provide high-level guidance. This paradigm, known as {shared autonomy}, enables autonomous vehicle and remote human operators to jointly formulate appropriate responses. To address critical decision timing with variable latency due to wireless network delays and human response time, we present LAVQA, a latency-aware shared autonomy framework that integrates Visual Question Answering (VQA) and spatiotemporal risk visualization. LAVQA augments visual queries with Latency-Induced COllision Map (LICOM), a dynamically evolving map that represents both temporal latency and spatial uncertainty. It enables remote operator to observe as the vehicle safety regions vary over time in the presence of dynamic obstacles and delayed responses. Closed-loop simulations in CARLA, the de-facto standard for autonomous vehicle simulator, suggest that that LAVQA can reduce collision rates by over 8x compared to latency-agnostic baselines.
Robo2VLM: Visual Question Answering from Large-Scale In-the-Wild Robot Manipulation Datasets
May 21, 2025Vision-Language Models (VLMs) acquire real-world knowledge and general reasoning ability through Internet-scale image-text corpora. They can augment robotic systems with scene understanding and task planning, and assist visuomotor policies that are trained on robot trajectory data. We explore the reverse paradigm - using rich, real, multi-modal robot trajectory data to enhance and evaluate VLMs. In this paper, we present Robo2VLM, a Visual Question Answering (VQA) dataset generation framework for VLMs. Given a human tele-operated robot trajectory, Robo2VLM derives ground-truth from non-visual and non-descriptive sensory modalities, such as end-effector pose, gripper aperture, and force sensing. Based on these modalities, it segments the robot trajectory into a sequence of manipulation phases. At each phase, Robo2VLM uses scene and interaction understanding to identify 3D properties of the robot, task goal, and the target object. The properties are used to generate representative VQA queries - images with textural multiple-choice questions - based on spatial, goal-conditioned, and interaction reasoning question templates. We curate Robo2VLM-1, a large-scale in-the-wild dataset with 684,710 questions covering 463 distinct scenes and 3,396 robotic manipulation tasks from 176k real robot trajectories. Results suggest that Robo2VLM-1 can benchmark and improve VLM capabilities in spatial and interaction reasoning.
GrowSplat: Constructing Temporal Digital Twins of Plants with Gaussian Splats
May 16, 2025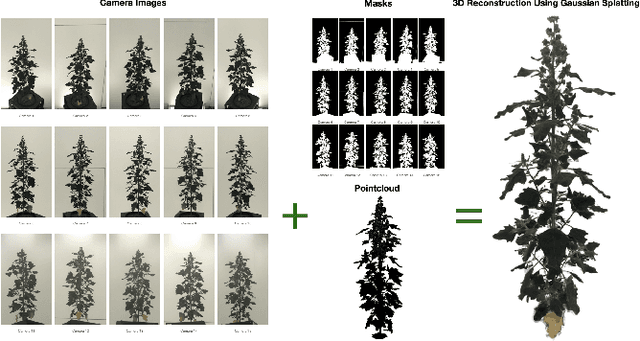

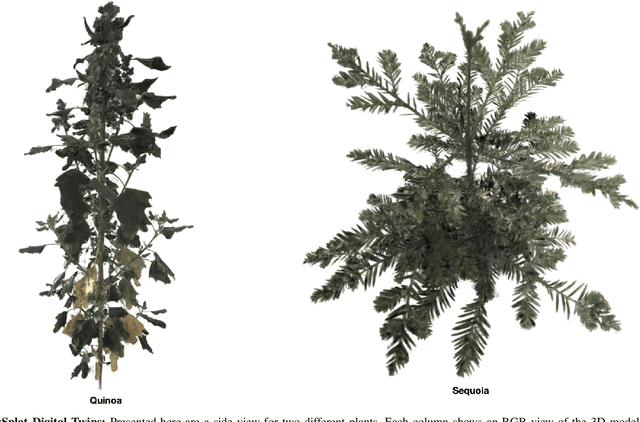
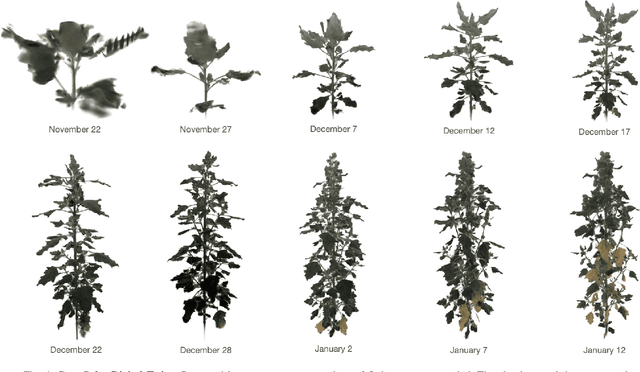
Accurate temporal reconstructions of plant growth are essential for plant phenotyping and breeding, yet remain challenging due to complex geometries, occlusions, and non-rigid deformations of plants. We present a novel framework for building temporal digital twins of plants by combining 3D Gaussian Splatting with a robust sample alignment pipeline. Our method begins by reconstructing Gaussian Splats from multi-view camera data, then leverages a two-stage registration approach: coarse alignment through feature-based matching and Fast Global Registration, followed by fine alignment with Iterative Closest Point. This pipeline yields a consistent 4D model of plant development in discrete time steps. We evaluate the approach on data from the Netherlands Plant Eco-phenotyping Center, demonstrating detailed temporal reconstructions of Sequoia and Quinoa species. Videos and Images can be seen at https://berkeleyautomation.github.io/GrowSplat/
Energy Efficient Planning for Repetitive Heterogeneous Tasks in Precision Agriculture
Apr 04, 2025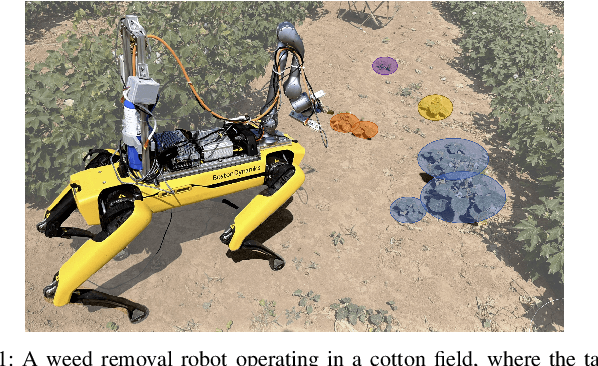



Robotic weed removal in precision agriculture introduces a repetitive heterogeneous task planning (RHTP) challenge for a mobile manipulator. RHTP has two unique characteristics: 1) an observe-first-and-manipulate-later (OFML) temporal constraint that forces a unique ordering of two different tasks for each target and 2) energy savings from efficient task collocation to minimize unnecessary movements. RHTP can be framed as a stochastic renewal process. According to the Renewal Reward Theorem, the expected energy usage per task cycle is the long-run average. Traditional task and motion planning focuses on feasibility rather than optimality due to the unknown object and obstacle position prior to execution. However, the known target/obstacle distribution in precision agriculture allows minimizing the expected energy usage. For each instance in this renewal process, we first compute task space partition, a novel data structure that computes all possibilities of task multiplexing and its probabilities with robot reachability. Then we propose a region-based set-coverage problem to formulate the RHTP as a mixed-integer nonlinear programming. We have implemented and solved RHTP using Branch-and-Bound solver. Compared to a baseline in simulations based on real field data, the results suggest a significant improvement in path length, number of robot stops, overall energy usage, and number of replans.
Can Large Vision Language Models Read Maps Like a Human?
Mar 18, 2025



In this paper, we introduce MapBench-the first dataset specifically designed for human-readable, pixel-based map-based outdoor navigation, curated from complex path finding scenarios. MapBench comprises over 1600 pixel space map path finding problems from 100 diverse maps. In MapBench, LVLMs generate language-based navigation instructions given a map image and a query with beginning and end landmarks. For each map, MapBench provides Map Space Scene Graph (MSSG) as an indexing data structure to convert between natural language and evaluate LVLM-generated results. We demonstrate that MapBench significantly challenges state-of-the-art LVLMs both zero-shot prompting and a Chain-of-Thought (CoT) augmented reasoning framework that decomposes map navigation into sequential cognitive processes. Our evaluation of both open-source and closed-source LVLMs underscores the substantial difficulty posed by MapBench, revealing critical limitations in their spatial reasoning and structured decision-making capabilities. We release all the code and dataset in https://github.com/taco-group/MapBench.
Toward Precise Robotic Weed Flaming Using a Mobile Manipulator with a Flamethrower
Jul 06, 2024


Robotic weed flaming is a new and environmentally friendly approach to weed removal in the agricultural field. Using a mobile manipulator equipped with a flamethrower, we design a new system and algorithm to enable effective weed flaming, which requires robotic manipulation with a soft and deformable end effector, as the thermal coverage of the flame is affected by dynamic or unknown environmental factors such as gravity, wind, atmospheric pressure, fuel tank pressure, and pose of the nozzle. System development includes overall design, hardware integration, and software pipeline. To enable precise weed removal, the greatest challenge is to detect and predict dynamic flame coverage in real time before motion planning, which is quite different from a conventional rigid gripper in grasping or a spray gun in painting. Based on the images from two onboard infrared cameras and the pose information of the flamethrower nozzle on a mobile manipulator, we propose a new dynamic flame coverage model. The flame model uses a center-arc curve with a Gaussian cross-section model to describe the flame coverage in real time. The experiments have demonstrated the working system and shown that our model and algorithm can achieve a mean average precision (mAP) of more than 76\% in the reprojected images during online prediction.
Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture Applications
Sep 28, 2023



A mobile manipulator often finds itself in an application where it needs to take a close-up view before performing a manipulation task. Named this as a coupled active perception and manipulation (CAPM) problem, we model the uncertainty in the perception process and devise a key state/task planning approach that considers reachability conditions as task constraints of both perception and manipulation tasks for the mobile platform. By minimizing the expected energy usage in the body key state planning while satisfying task constraints, our algorithm achieves the best balance between the task success rate and energy usage. We have implemented the algorithm and tested it in both simulation and physical experiments. The results have confirmed that our algorithm has a lower energy consumption compared to a two-stage decoupled approach, while still maintaining a success rate of 100\% for the task.
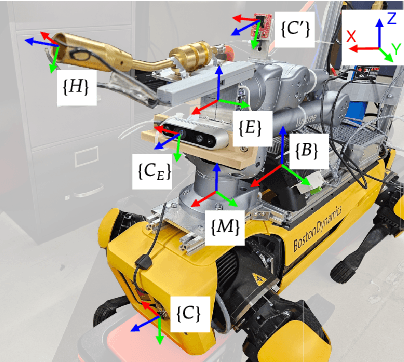
DIME-Net: Neural Network-Based Dynamic Intrinsic Parameter Rectification for Cameras with Optical Image Stabilization System
Mar 20, 2023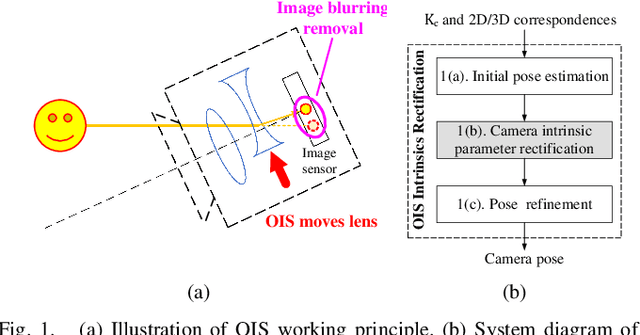
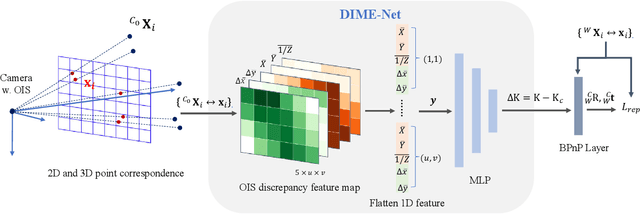
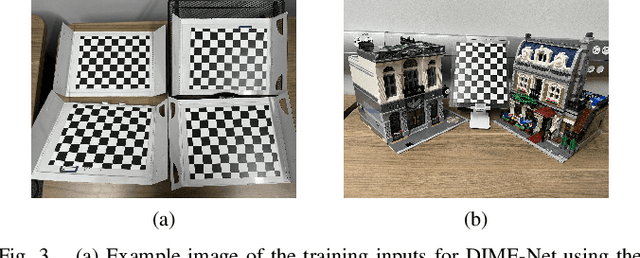
Optical Image Stabilization (OIS) system in mobile devices reduces image blurring by steering lens to compensate for hand jitters. However, OIS changes intrinsic camera parameters (i.e. $\mathrm{K}$ matrix) dynamically which hinders accurate camera pose estimation or 3D reconstruction. Here we propose a novel neural network-based approach that estimates $\mathrm{K}$ matrix in real-time so that pose estimation or scene reconstruction can be run at camera native resolution for the highest accuracy on mobile devices. Our network design takes gratified projection model discrepancy feature and 3D point positions as inputs and employs a Multi-Layer Perceptron (MLP) to approximate $f_{\mathrm{K}}$ manifold. We also design a unique training scheme for this network by introducing a Back propagated PnP (BPnP) layer so that reprojection error can be adopted as the loss function. The training process utilizes precise calibration patterns for capturing accurate $f_{\mathrm{K}}$ manifold but the trained network can be used anywhere. We name the proposed Dynamic Intrinsic Manifold Estimation network as DIME-Net and have it implemented and tested on three different mobile devices. In all cases, DIME-Net can reduce reprojection error by at least $64\%$ indicating that our design is successful.
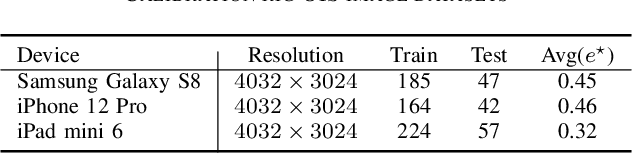
Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training Data
Jun 16, 2021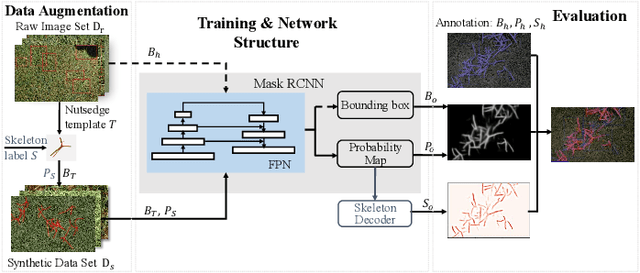
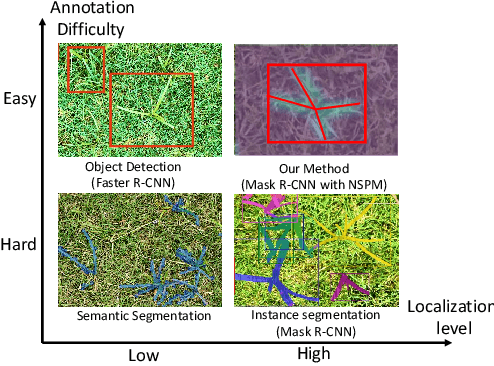
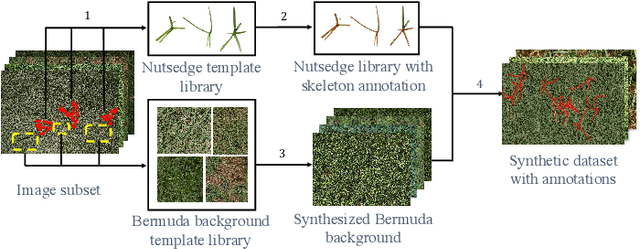
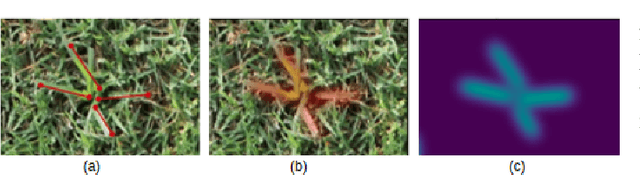
To enable robotic weed control, we develop algorithms to detect nutsedge weed from bermudagrass turf. Due to the similarity between the weed and the background turf, manual data labeling is expensive and error-prone. Consequently, directly applying deep learning methods for object detection cannot generate satisfactory results. Building on an instance detection approach (i.e. Mask R-CNN), we combine synthetic data with raw data to train the network. We propose an algorithm to generate high fidelity synthetic data, adopting different levels of annotations to reduce labeling cost. Moreover, we construct a nutsedge skeleton-based probabilistic map (NSPM) as the neural network input to reduce the reliance on pixel-wise precise labeling. We also modify loss function from cross entropy to Kullback-Leibler divergence which accommodates uncertainty in the labeling process. We implement the proposed algorithm and compare it with both Faster R-CNN and Mask R-CNN. The results show that our design can effectively overcome the impact of imprecise and insufficient training sample issues and significantly outperform the Faster R-CNN counterpart with a false negative rate of only 0.4%. In particular, our approach also reduces labeling time by 95% while achieving better performance if comparing with the original Mask R-CNN approach.