 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCalibration System and Algorithm Design for a Soft Hinged Micro Scanning Mirror with a Triaxial Hall Effect Sensor
Nov 24, 2023



Micro scanning mirrors (MSM) extend the range and field of view of LiDARs, medical imaging devices, and laser projectors. However, a new class of soft-hinged MSMs contains out-of-plane translation in addition to the 2 degree-of-freedom rotations, which presents a cabliration challenge. We report a new calibration system and algorithm design to address the challenge. In the calibration system, a new low-cost calibration rig design employs a minimal 2-laser beam approach. The new new algorithm builds on the reflection principle and an optimization approach to precisely measure MSM poses. To establish the mapping between Hall sensor readings and MSM poses, we propose a self-synchronizing periodicity-based model fitting calibration approach. We achieve an MSM poses estimation accuracy of 0.020{\deg} with a standard deviation of 0.011{\deg}.
DIME-Net: Neural Network-Based Dynamic Intrinsic Parameter Rectification for Cameras with Optical Image Stabilization System
Mar 20, 2023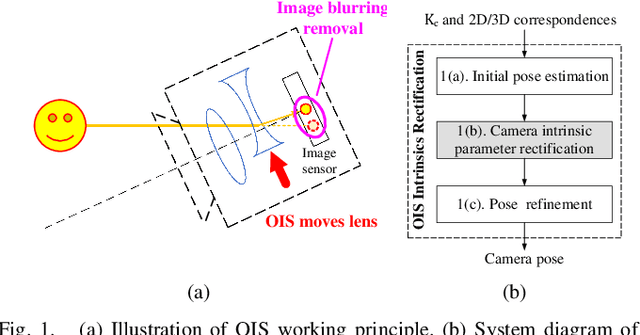
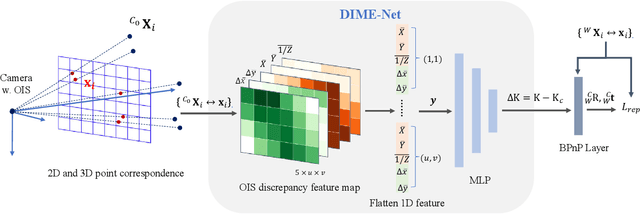
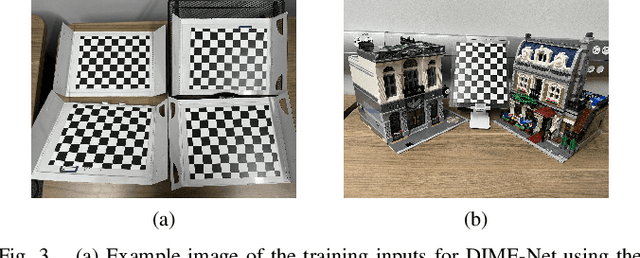
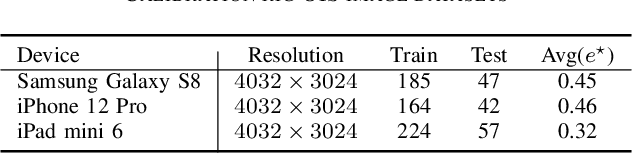
Optical Image Stabilization (OIS) system in mobile devices reduces image blurring by steering lens to compensate for hand jitters. However, OIS changes intrinsic camera parameters (i.e. $\mathrm{K}$ matrix) dynamically which hinders accurate camera pose estimation or 3D reconstruction. Here we propose a novel neural network-based approach that estimates $\mathrm{K}$ matrix in real-time so that pose estimation or scene reconstruction can be run at camera native resolution for the highest accuracy on mobile devices. Our network design takes gratified projection model discrepancy feature and 3D point positions as inputs and employs a Multi-Layer Perceptron (MLP) to approximate $f_{\mathrm{K}}$ manifold. We also design a unique training scheme for this network by introducing a Back propagated PnP (BPnP) layer so that reprojection error can be adopted as the loss function. The training process utilizes precise calibration patterns for capturing accurate $f_{\mathrm{K}}$ manifold but the trained network can be used anywhere. We name the proposed Dynamic Intrinsic Manifold Estimation network as DIME-Net and have it implemented and tested on three different mobile devices. In all cases, DIME-Net can reduce reprojection error by at least $64\%$ indicating that our design is successful.
Model Quality Aware RANSAC: A Robust Camera Motion Estimator
Nov 27, 2019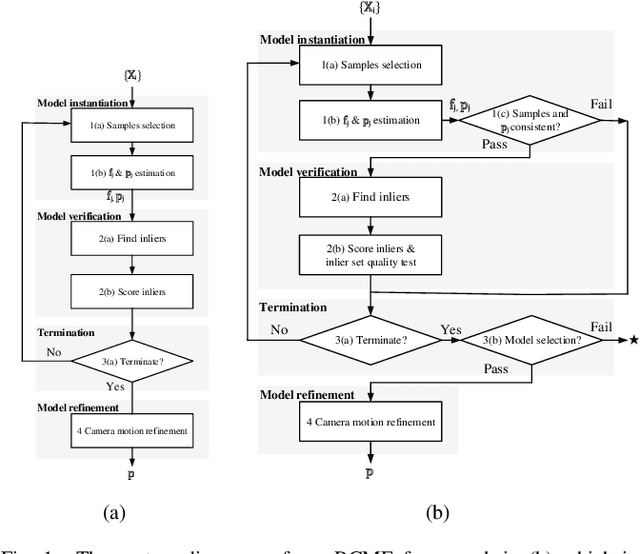
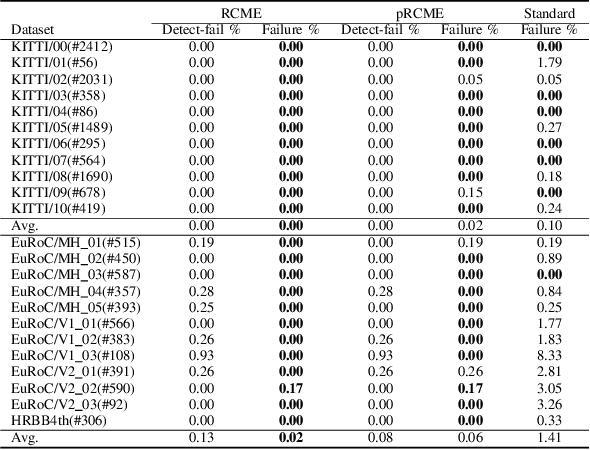
Robust estimation of camera motion under the presence of outlier noise is a fundamental problem in robotics and computer vision. Despite existing efforts that focus on detecting motion and scene degeneracies, the best existing approach that builds on Random Consensus Sampling (RANSAC) still has non-negligible failure rate. Since a single failure can lead to the failure of the entire visual simultaneous localization and mapping, it is important to further improve robust estimation algorithm. We propose a new robust camera motion estimator (RCME) by incorporating two main changes: model-sample consistence test at model instantiation step and inlier set quality test that verifies model-inlier consistence using differential entropy. We have implemented our RCME algorithm and tested it under many public datasets. The results have shown consistent reduction in failure rate when comparing to RANSAC-based Gold Standard approach. More specifically, the overall failure rate for indoor environments has reduced from 1.41% to 0.02%.