 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Precise Robotic Weed Flaming Using a Mobile Manipulator with a Flamethrower
Jul 06, 2024


Robotic weed flaming is a new and environmentally friendly approach to weed removal in the agricultural field. Using a mobile manipulator equipped with a flamethrower, we design a new system and algorithm to enable effective weed flaming, which requires robotic manipulation with a soft and deformable end effector, as the thermal coverage of the flame is affected by dynamic or unknown environmental factors such as gravity, wind, atmospheric pressure, fuel tank pressure, and pose of the nozzle. System development includes overall design, hardware integration, and software pipeline. To enable precise weed removal, the greatest challenge is to detect and predict dynamic flame coverage in real time before motion planning, which is quite different from a conventional rigid gripper in grasping or a spray gun in painting. Based on the images from two onboard infrared cameras and the pose information of the flamethrower nozzle on a mobile manipulator, we propose a new dynamic flame coverage model. The flame model uses a center-arc curve with a Gaussian cross-section model to describe the flame coverage in real time. The experiments have demonstrated the working system and shown that our model and algorithm can achieve a mean average precision (mAP) of more than 76\% in the reprojected images during online prediction.
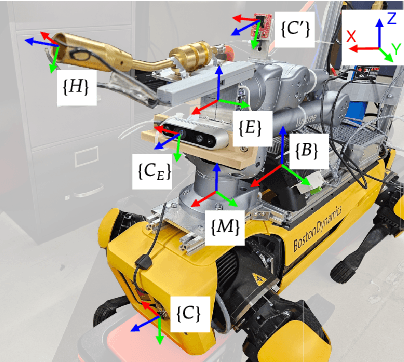
Coupled Active Perception and Manipulation Planning for a Mobile Manipulator in Precision Agriculture Applications
Sep 28, 2023



A mobile manipulator often finds itself in an application where it needs to take a close-up view before performing a manipulation task. Named this as a coupled active perception and manipulation (CAPM) problem, we model the uncertainty in the perception process and devise a key state/task planning approach that considers reachability conditions as task constraints of both perception and manipulation tasks for the mobile platform. By minimizing the expected energy usage in the body key state planning while satisfying task constraints, our algorithm achieves the best balance between the task success rate and energy usage. We have implemented the algorithm and tested it in both simulation and physical experiments. The results have confirmed that our algorithm has a lower energy consumption compared to a two-stage decoupled approach, while still maintaining a success rate of 100\% for the task.
Multi-growth stage plant recognition: a case study of Palmer amaranth in cotton
Jul 28, 2023Many advanced, image-based precision agricultural technologies for plant breeding, field crop research, and site-specific crop management hinge on the reliable detection and phenotyping of plants across highly variable morphological growth stages. Convolutional neural networks (CNNs) have shown promise for image-based plant phenotyping and weed recognition, but their ability to recognize growth stages, often with stark differences in appearance, is uncertain. Amaranthus palmeri (Palmer amaranth) is a particularly challenging weed plant in cotton (Gossypium hirsutum) production, exhibiting highly variable plant morphology both across growth stages over a growing season, as well as between plants at a given growth stage due to high genetic diversity. In this paper, we investigate eight-class growth stage recognition of A. palmeri in cotton as a challenging model for You Only Look Once (YOLO) architectures. We compare 26 different architecture variants from YOLO v3, v5, v6, v6 3.0, v7, and v8 on an eight-class growth stage dataset of A. palmeri. The highest mAP@[0.5:0.95] for recognition of all growth stage classes was 47.34% achieved by v8-X, with inter-class confusion across visually similar growth stages. With all growth stages grouped as a single class, performance increased, with a maximum mean average precision (mAP@[0.5:0.95]) of 67.05% achieved by v7-Original. Single class recall of up to 81.42% was achieved by v5-X, and precision of up to 89.72% was achieved by v8-X. Class activation maps (CAM) were used to understand model attention on the complex dataset. Fewer classes, grouped by visual or size features improved performance over the ground-truth eight-class dataset. Successful growth stage detection highlights the substantial opportunity for improving plant phenotyping and weed recognition technologies with open-source object detection architectures.
Toward Robotic Weed Control: Detection of Nutsedge Weed in Bermudagrass Turf Using Inaccurate and Insufficient Training Data
Jun 16, 2021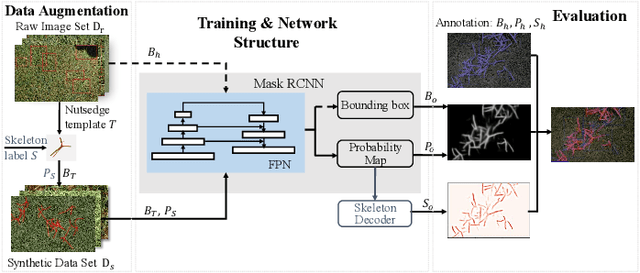
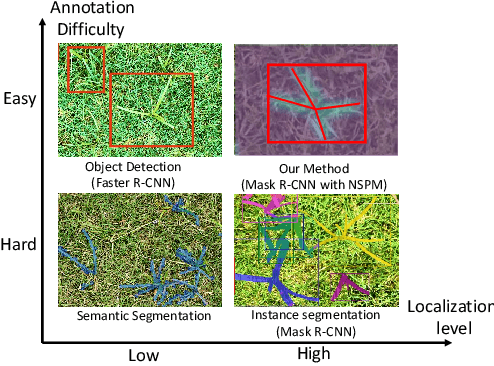
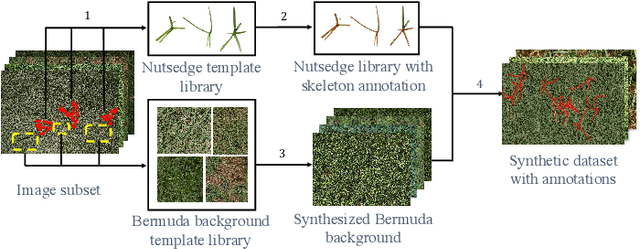
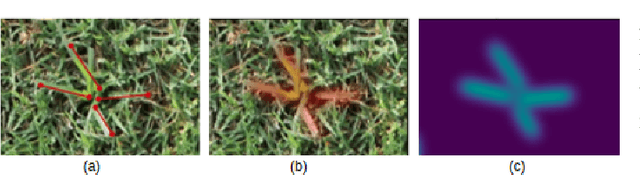
To enable robotic weed control, we develop algorithms to detect nutsedge weed from bermudagrass turf. Due to the similarity between the weed and the background turf, manual data labeling is expensive and error-prone. Consequently, directly applying deep learning methods for object detection cannot generate satisfactory results. Building on an instance detection approach (i.e. Mask R-CNN), we combine synthetic data with raw data to train the network. We propose an algorithm to generate high fidelity synthetic data, adopting different levels of annotations to reduce labeling cost. Moreover, we construct a nutsedge skeleton-based probabilistic map (NSPM) as the neural network input to reduce the reliance on pixel-wise precise labeling. We also modify loss function from cross entropy to Kullback-Leibler divergence which accommodates uncertainty in the labeling process. We implement the proposed algorithm and compare it with both Faster R-CNN and Mask R-CNN. The results show that our design can effectively overcome the impact of imprecise and insufficient training sample issues and significantly outperform the Faster R-CNN counterpart with a false negative rate of only 0.4%. In particular, our approach also reduces labeling time by 95% while achieving better performance if comparing with the original Mask R-CNN approach.