 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBreathless: An 8-hour Performance Contrasting Human and Robot Expressiveness
Nov 19, 2024



This paper describes the robot technology behind an original performance that pairs a human dancer (Cuan) with an industrial robot arm for an eight-hour dance that unfolds over the timespan of an American workday. To control the robot arm, we combine a range of sinusoidal motions with varying amplitude, frequency and offset at each joint to evoke human motions common in physical labor such as stirring, digging, and stacking. More motions were developed using deep learning techniques for video-based human-pose tracking and extraction. We combine these pre-recorded motions with improvised robot motions created live by putting the robot into teach-mode and triggering force sensing from the robot joints onstage. All motions are combined with commercial and original music using a custom suite of python software with AppleScript, Keynote, and Zoom to facilitate on-stage communication with the dancer. The resulting performance contrasts the expressivity of the human body with the precision of robot machinery. Video, code and data are available on the project website: https://sites.google.com/playing.studio/breathless
Automating Deformable Gasket Assembly
Aug 22, 2024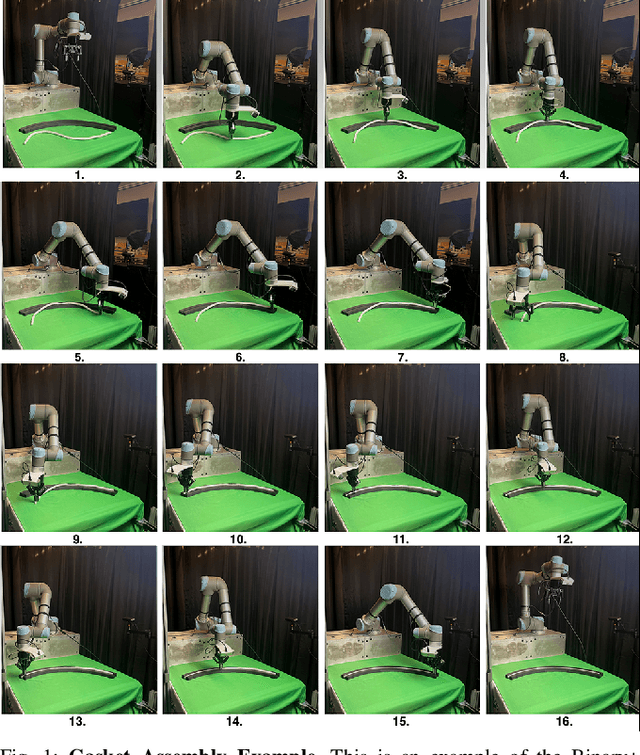
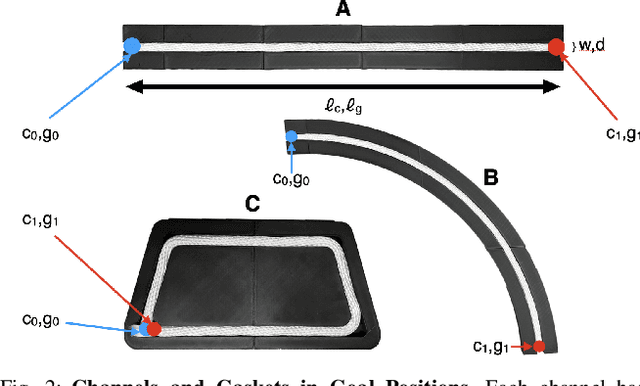
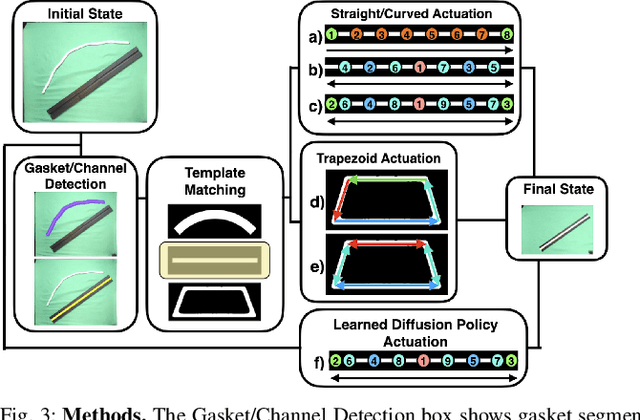
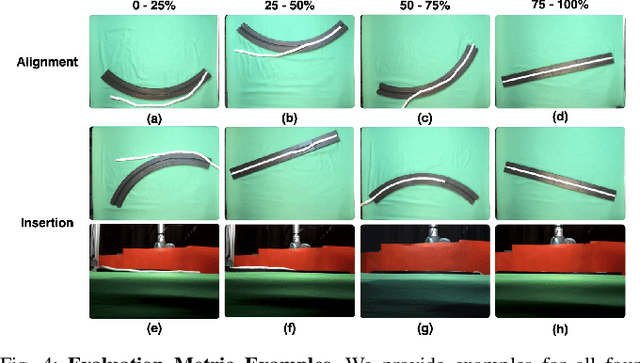
In Gasket Assembly, a deformable gasket must be aligned and pressed into a narrow channel. This task is common for sealing surfaces in the manufacturing of automobiles, appliances, electronics, and other products. Gasket Assembly is a long-horizon, high-precision task and the gasket must align with the channel and be fully pressed in to achieve a secure fit. To compare approaches, we present 4 methods for Gasket Assembly: one policy from deep imitation learning and three procedural algorithms. We evaluate these methods with 100 physical trials. Results suggest that the Binary+ algorithm succeeds in 10/10 on the straight channel whereas the learned policy based on 250 human teleoperated demonstrations succeeds in 8/10 trials and is significantly slower. Code, CAD models, videos, and data can be found at https://berkeleyautomation.github.io/robot-gasket/
STITCH: Augmented Dexterity for Suture Throws Including Thread Coordination and Handoffs
Apr 08, 2024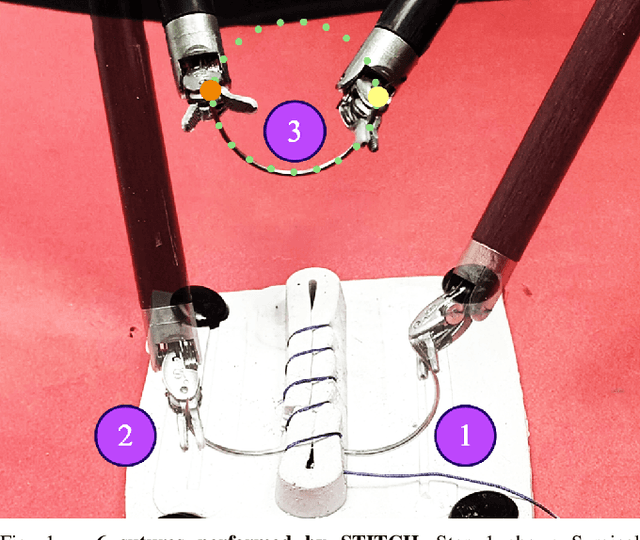
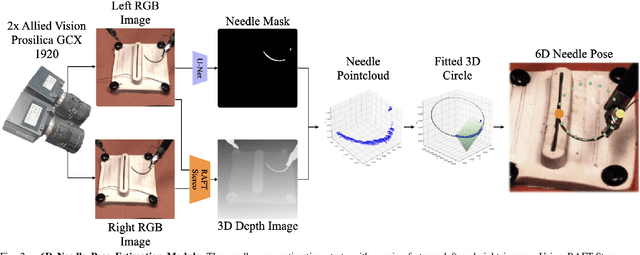
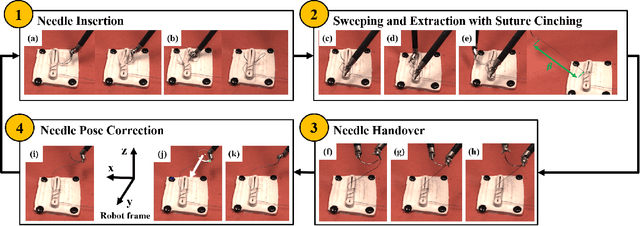
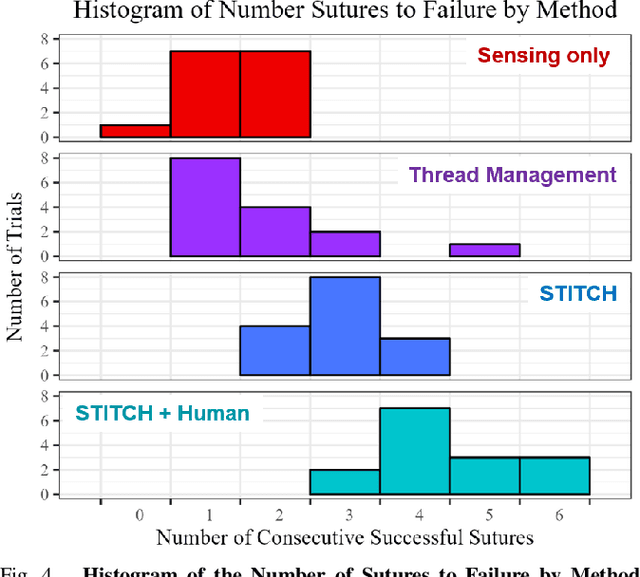
We present STITCH: an augmented dexterity pipeline that performs Suture Throws Including Thread Coordination and Handoffs. STITCH iteratively performs needle insertion, thread sweeping, needle extraction, suture cinching, needle handover, and needle pose correction with failure recovery policies. We introduce a novel visual 6D needle pose estimation framework using a stereo camera pair and new suturing motion primitives. We compare STITCH to baselines, including a proprioception-only and a policy without visual servoing. In physical experiments across 15 trials, STITCH achieves an average of 2.93 sutures without human intervention and 4.47 sutures with human intervention. See https://sites.google.com/berkeley.edu/stitch for code and supplemental materials.
The Busboy Problem: Efficient Tableware Decluttering Using Consolidation and Multi-Object Grasps
Jul 08, 2023



We present the "Busboy Problem": automating an efficient decluttering of cups, bowls, and silverware from a planar surface. As grasping and transporting individual items is highly inefficient, we propose policies to generate grasps for multiple items. We introduce the metric of Objects per Trip (OpT) carried by the robot to the collection bin to analyze the improvement seen as a result of our policies. In physical experiments with singulated items, we find that consolidation and multi-object grasps resulted in an 1.8x improvement in OpT, compared to methods without multi-object grasps. See https://sites.google.com/berkeley.edu/busboyproblem for code and supplemental materials.