 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChoreographing a World of Dynamic Objects
Jan 07, 2026Dynamic objects in our physical 4D (3D + time) world are constantly evolving, deforming, and interacting with other objects, leading to diverse 4D scene dynamics. In this paper, we present a universal generative pipeline, CHORD, for CHOReographing Dynamic objects and scenes and synthesizing this type of phenomena. Traditional rule-based graphics pipelines to create these dynamics are based on category-specific heuristics, yet are labor-intensive and not scalable. Recent learning-based methods typically demand large-scale datasets, which may not cover all object categories in interest. Our approach instead inherits the universality from the video generative models by proposing a distillation-based pipeline to extract the rich Lagrangian motion information hidden in the Eulerian representations of 2D videos. Our method is universal, versatile, and category-agnostic. We demonstrate its effectiveness by conducting experiments to generate a diverse range of multi-body 4D dynamics, show its advantage compared to existing methods, and demonstrate its applicability in generating robotics manipulation policies. Project page: https://yanzhelyu.github.io/chord
Dream2Flow: Bridging Video Generation and Open-World Manipulation with 3D Object Flow
Dec 31, 2025Generative video modeling has emerged as a compelling tool to zero-shot reason about plausible physical interactions for open-world manipulation. Yet, it remains a challenge to translate such human-led motions into the low-level actions demanded by robotic systems. We observe that given an initial image and task instruction, these models excel at synthesizing sensible object motions. Thus, we introduce Dream2Flow, a framework that bridges video generation and robotic control through 3D object flow as an intermediate representation. Our method reconstructs 3D object motions from generated videos and formulates manipulation as object trajectory tracking. By separating the state changes from the actuators that realize those changes, Dream2Flow overcomes the embodiment gap and enables zero-shot guidance from pre-trained video models to manipulate objects of diverse categories-including rigid, articulated, deformable, and granular. Through trajectory optimization or reinforcement learning, Dream2Flow converts reconstructed 3D object flow into executable low-level commands without task-specific demonstrations. Simulation and real-world experiments highlight 3D object flow as a general and scalable interface for adapting video generation models to open-world robotic manipulation. Videos and visualizations are available at https://dream2flow.github.io/.
BOMP: Bin-Optimized Motion Planning
Oct 31, 2024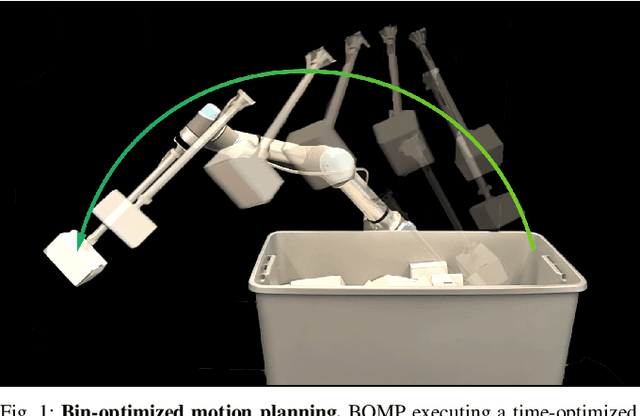
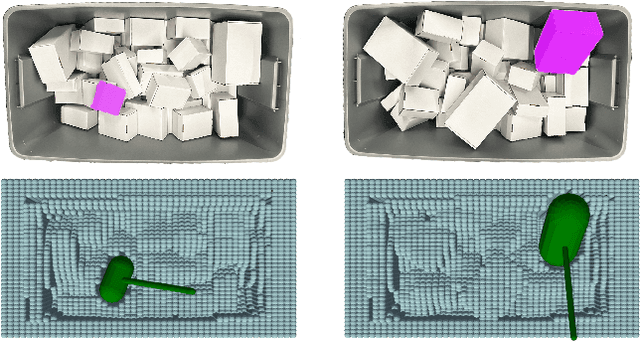
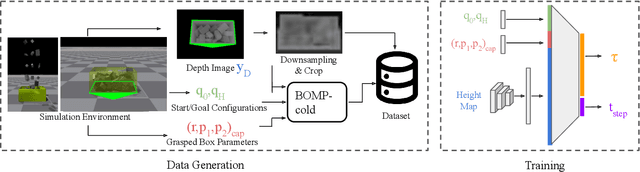
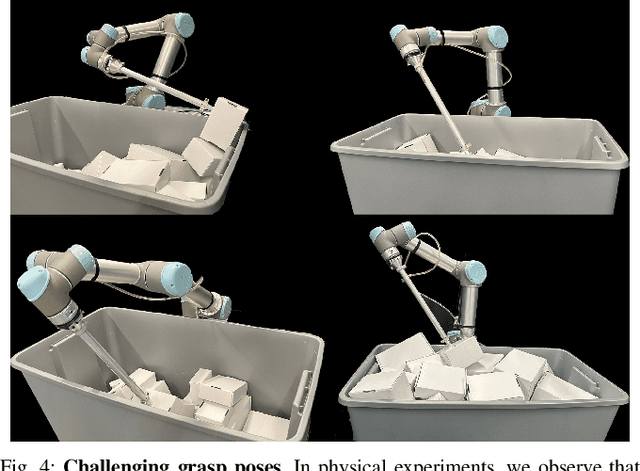
In logistics, the ability to quickly compute and execute pick-and-place motions from bins is critical to increasing productivity. We present Bin-Optimized Motion Planning (BOMP), a motion planning framework that plans arm motions for a six-axis industrial robot with a long-nosed suction tool to remove boxes from deep bins. BOMP considers robot arm kinematics, actuation limits, the dimensions of a grasped box, and a varying height map of a bin environment to rapidly generate time-optimized, jerk-limited, and collision-free trajectories. The optimization is warm-started using a deep neural network trained offline in simulation with 25,000 scenes and corresponding trajectories. Experiments with 96 simulated and 15 physical environments suggest that BOMP generates collision-free trajectories that are up to 58 % faster than baseline sampling-based planners and up to 36 % faster than an industry-standard Up-Over-Down algorithm, which has an extremely low 15 % success rate in this context. BOMP also generates jerk-limited trajectories while baselines do not. Website: https://sites.google.com/berkeley.edu/bomp.
RoVi-Aug: Robot and Viewpoint Augmentation for Cross-Embodiment Robot Learning
Sep 05, 2024



Scaling up robot learning requires large and diverse datasets, and how to efficiently reuse collected data and transfer policies to new embodiments remains an open question. Emerging research such as the Open-X Embodiment (OXE) project has shown promise in leveraging skills by combining datasets including different robots. However, imbalances in the distribution of robot types and camera angles in many datasets make policies prone to overfit. To mitigate this issue, we propose RoVi-Aug, which leverages state-of-the-art image-to-image generative models to augment robot data by synthesizing demonstrations with different robots and camera views. Through extensive physical experiments, we show that, by training on robot- and viewpoint-augmented data, RoVi-Aug can zero-shot deploy on an unseen robot with significantly different camera angles. Compared to test-time adaptation algorithms such as Mirage, RoVi-Aug requires no extra processing at test time, does not assume known camera angles, and allows policy fine-tuning. Moreover, by co-training on both the original and augmented robot datasets, RoVi-Aug can learn multi-robot and multi-task policies, enabling more efficient transfer between robots and skills and improving success rates by up to 30%.
ORBIT-Surgical: An Open-Simulation Framework for Learning Surgical Augmented Dexterity
Apr 24, 2024



Physics-based simulations have accelerated progress in robot learning for driving, manipulation, and locomotion. Yet, a fast, accurate, and robust surgical simulation environment remains a challenge. In this paper, we present ORBIT-Surgical, a physics-based surgical robot simulation framework with photorealistic rendering in NVIDIA Omniverse. We provide 14 benchmark surgical tasks for the da Vinci Research Kit (dVRK) and Smart Tissue Autonomous Robot (STAR) which represent common subtasks in surgical training. ORBIT-Surgical leverages GPU parallelization to train reinforcement learning and imitation learning algorithms to facilitate study of robot learning to augment human surgical skills. ORBIT-Surgical also facilitates realistic synthetic data generation for active perception tasks. We demonstrate ORBIT-Surgical sim-to-real transfer of learned policies onto a physical dVRK robot. Project website: orbit-surgical.github.io
STITCH: Augmented Dexterity for Suture Throws Including Thread Coordination and Handoffs
Apr 08, 2024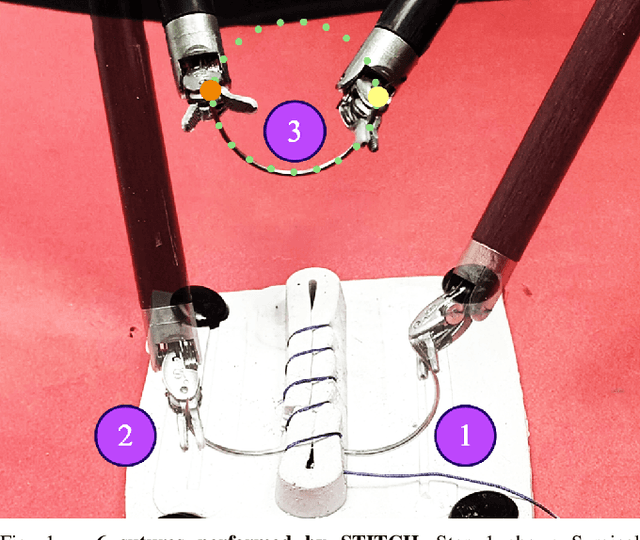
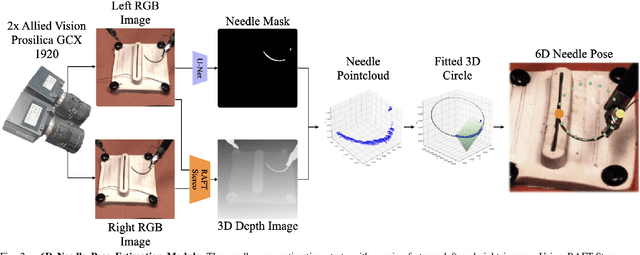
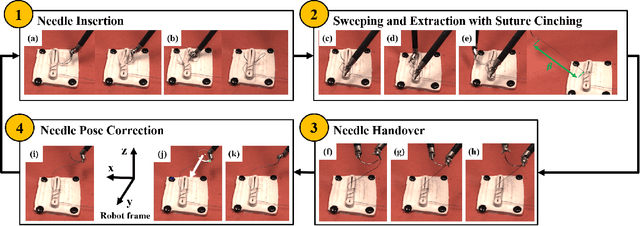
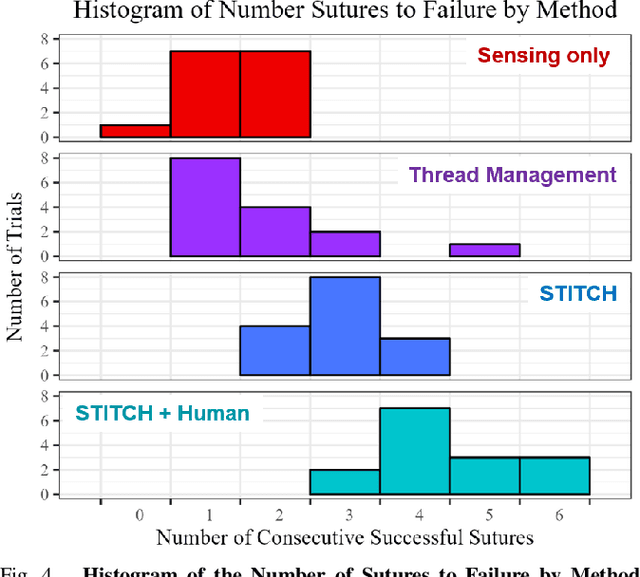
We present STITCH: an augmented dexterity pipeline that performs Suture Throws Including Thread Coordination and Handoffs. STITCH iteratively performs needle insertion, thread sweeping, needle extraction, suture cinching, needle handover, and needle pose correction with failure recovery policies. We introduce a novel visual 6D needle pose estimation framework using a stereo camera pair and new suturing motion primitives. We compare STITCH to baselines, including a proprioception-only and a policy without visual servoing. In physical experiments across 15 trials, STITCH achieves an average of 2.93 sutures without human intervention and 4.47 sutures with human intervention. See https://sites.google.com/berkeley.edu/stitch for code and supplemental materials.
Mirage: Cross-Embodiment Zero-Shot Policy Transfer with Cross-Painting
Feb 29, 2024



The ability to reuse collected data and transfer trained policies between robots could alleviate the burden of additional data collection and training. While existing approaches such as pretraining plus finetuning and co-training show promise, they do not generalize to robots unseen in training. Focusing on common robot arms with similar workspaces and 2-jaw grippers, we investigate the feasibility of zero-shot transfer. Through simulation studies on 8 manipulation tasks, we find that state-based Cartesian control policies can successfully zero-shot transfer to a target robot after accounting for forward dynamics. To address robot visual disparities for vision-based policies, we introduce Mirage, which uses "cross-painting"--masking out the unseen target robot and inpainting the seen source robot--during execution in real time so that it appears to the policy as if the trained source robot were performing the task. Despite its simplicity, our extensive simulation and physical experiments provide strong evidence that Mirage can successfully zero-shot transfer between different robot arms and grippers with only minimal performance degradation on a variety of manipulation tasks such as picking, stacking, and assembly, significantly outperforming a generalist policy. Project website: https://robot-mirage.github.io/
FogROS2-Sky: Optimizing Latency and Cost for Multi-Cloud Robot Applications
Nov 09, 2023This paper studies the cost-performance tradeoffs in cloud robotics with heterogeneous cloud service providers, which have complex pricing models and varying application requirements. We present FogROS2-Sky, a cost-efficient open source robotics platform that offloads unmodified ROS2 applications to multiple cloud providers and enables fine-grained cost analysis for ROS2 applications' communication with multiple cloud providers. As each provider offers different options for CPU, GPU, memory, and latency, it can be very difficult for users to decide which to choose. FogROS2-Sky includes an optimization algorithm, which either finds the best available hardware specification that fulfills the user's latency and cost constraints or reports that such a specification does not exist. We use FogROS2-Sky to perform time-cost analysis on three robotics applications: visual SLAM, grasp planning, and motion planning. We are able to sample different hardware setups at nearly half the cost while still create cost and latency functions suitable for the optimizer. We also evaluate the optimizer's efficacy for these applications with the Pareto frontier and show that the optimizer selects efficient hardware configurations to balance cost and latency. Videos and code are available on the website https://sites.google.com/view/fogros2-sky
FogROS2-SGC: A ROS2 Cloud Robotics Platform for Secure Global Connectivity
Jun 29, 2023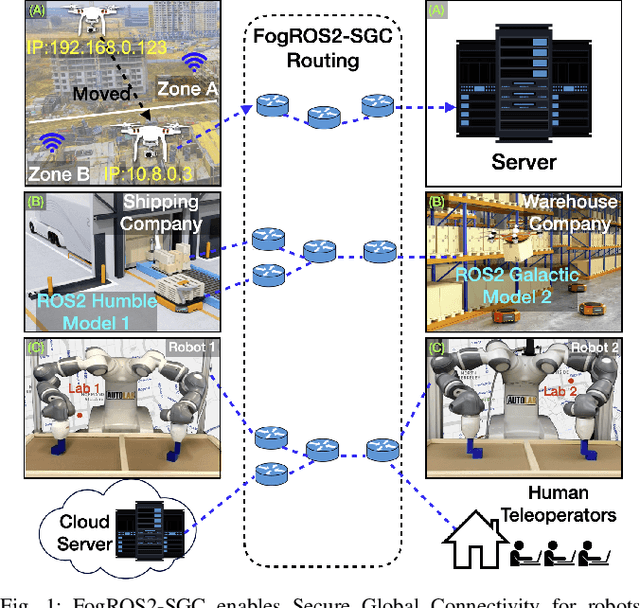
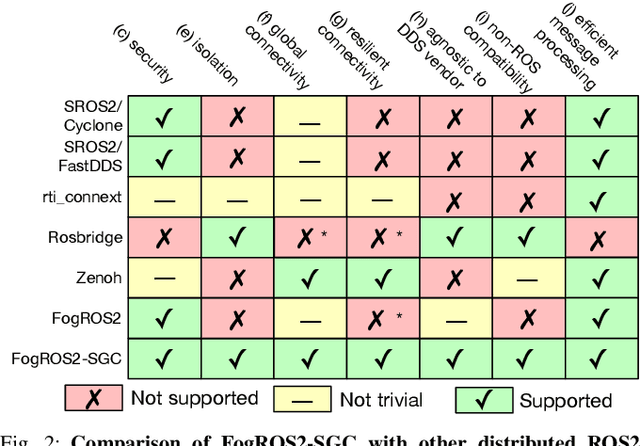
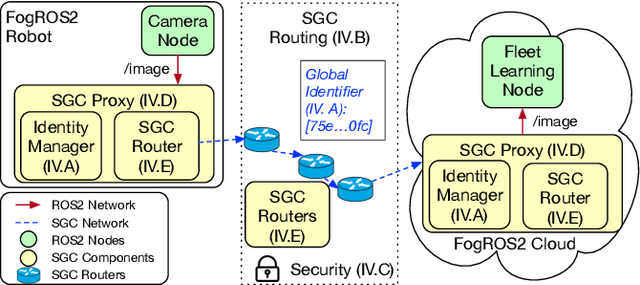
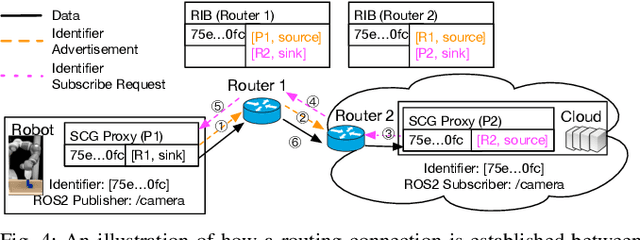
The Robot Operating System (ROS2) is the most widely used software platform for building robotics applications. FogROS2 extends ROS2 to allow robots to access cloud computing on demand. However, ROS2 and FogROS2 assume that all robots are locally connected and that each robot has full access and control of the other robots. With applications like distributed multi-robot systems, remote robot control, and mobile robots, robotics increasingly involves the global Internet and complex trust management. Existing approaches for connecting disjoint ROS2 networks lack key features such as security, compatibility, efficiency, and ease of use. We introduce FogROS2-SGC, an extension of FogROS2 that can effectively connect robot systems across different physical locations, networks, and Data Distribution Services (DDS). With globally unique and location-independent identifiers, FogROS2-SGC securely and efficiently routes data between robotics components around the globe. FogROS2-SGC is agnostic to the ROS2 distribution and configuration, is compatible with non-ROS2 software, and seamlessly extends existing ROS2 applications without any code modification. Experiments suggest FogROS2-SGC is 19x faster than rosbridge (a ROS2 package with comparable features, but lacking security). We also apply FogROS2-SGC to 4 robots and compute nodes that are 3600km apart. Videos and code are available on the project website https://sites.google.com/view/fogros2-sgc.
Automating Vascular Shunt Insertion with the dVRK Surgical Robot
Nov 04, 2022Vascular shunt insertion is a fundamental surgical procedure used to temporarily restore blood flow to tissues. It is often performed in the field after major trauma. We formulate a problem of automated vascular shunt insertion and propose a pipeline to perform Automated Vascular Shunt Insertion (AVSI) using a da Vinci Research Kit. The pipeline uses a learned visual model to estimate the locus of the vessel rim, plans a grasp on the rim, and moves to grasp at that point. The first robot gripper then pulls the rim to stretch open the vessel with a dilation motion. The second robot gripper then proceeds to insert a shunt into the vessel phantom (a model of the blood vessel) with a chamfer tilt followed by a screw motion. Results suggest that AVSI achieves a high success rate even with tight tolerances and varying vessel orientations up to 30{\deg}. Supplementary material, dataset, videos, and visualizations can be found at https://sites.google.com/berkeley.edu/autolab-avsi.