 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBOMP: Bin-Optimized Motion Planning
Oct 31, 2024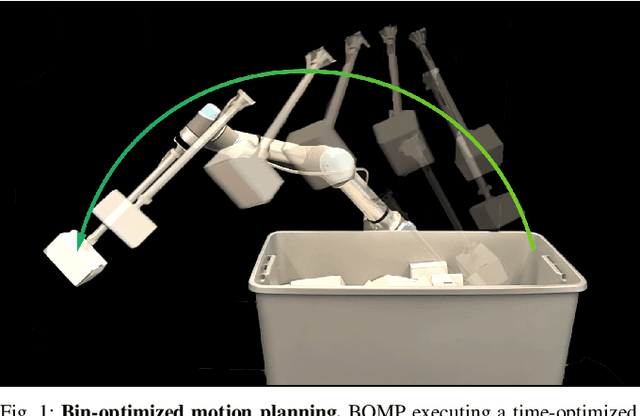
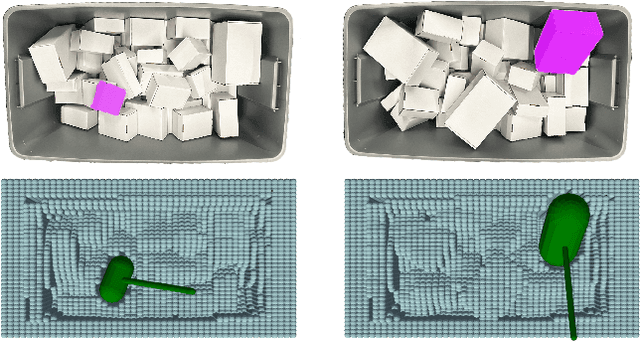
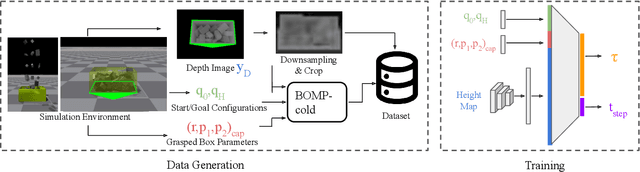
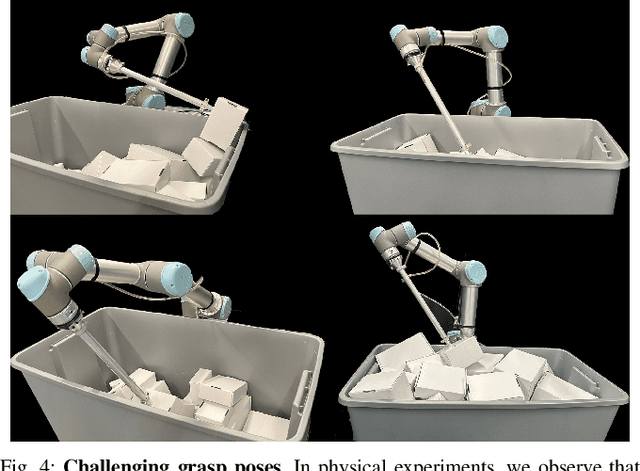
In logistics, the ability to quickly compute and execute pick-and-place motions from bins is critical to increasing productivity. We present Bin-Optimized Motion Planning (BOMP), a motion planning framework that plans arm motions for a six-axis industrial robot with a long-nosed suction tool to remove boxes from deep bins. BOMP considers robot arm kinematics, actuation limits, the dimensions of a grasped box, and a varying height map of a bin environment to rapidly generate time-optimized, jerk-limited, and collision-free trajectories. The optimization is warm-started using a deep neural network trained offline in simulation with 25,000 scenes and corresponding trajectories. Experiments with 96 simulated and 15 physical environments suggest that BOMP generates collision-free trajectories that are up to 58 % faster than baseline sampling-based planners and up to 36 % faster than an industry-standard Up-Over-Down algorithm, which has an extremely low 15 % success rate in this context. BOMP also generates jerk-limited trajectories while baselines do not. Website: https://sites.google.com/berkeley.edu/bomp.
Precise Object Placement Using Force-Torque Feedback
Apr 26, 2024Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Mechanical Search on Shelves with Efficient Stacking and Destacking of Objects
Jul 05, 2022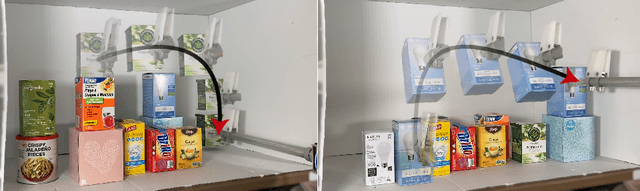
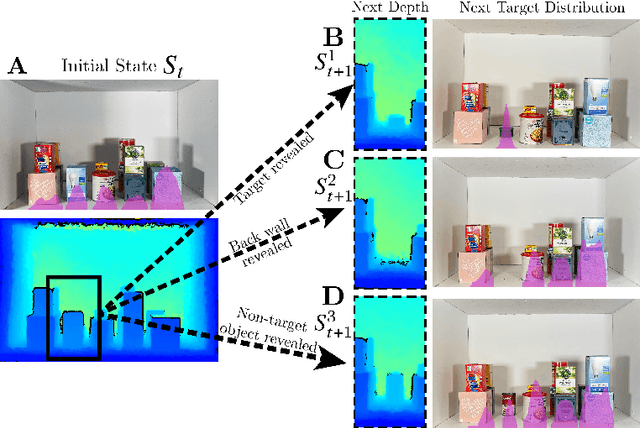
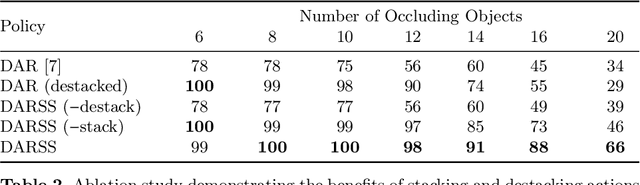
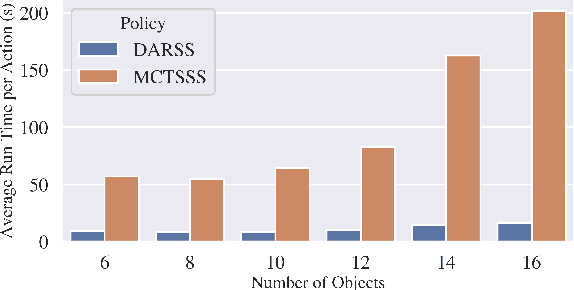
Stacking increases storage efficiency in shelves, but the lack of visibility and accessibility makes the mechanical search problem of revealing and extracting target objects difficult for robots. In this paper, we extend the lateral-access mechanical search problem to shelves with stacked items and introduce two novel policies -- Distribution Area Reduction for Stacked Scenes (DARSS) and Monte Carlo Tree Search for Stacked Scenes (MCTSSS) -- that use destacking and restacking actions. MCTSSS improves on prior lookahead policies by considering future states after each potential action. Experiments in 1200 simulated and 18 physical trials with a Fetch robot equipped with a blade and suction cup suggest that destacking and restacking actions can reveal the target object with 82--100% success in simulation and 66--100% in physical experiments, and are critical for searching densely packed shelves. In the simulation experiments, both policies outperform a baseline and achieve similar success rates but take more steps compared with an oracle policy that has full state information. In simulation and physical experiments, DARSS outperforms MCTSSS in median number of steps to reveal the target, but MCTSSS has a higher success rate in physical experiments, suggesting robustness to perception noise. See https://sites.google.com/berkeley.edu/stax-ray for supplementary material.
Mechanical Search on Shelves using a Novel "Bluction" Tool
Jan 22, 2022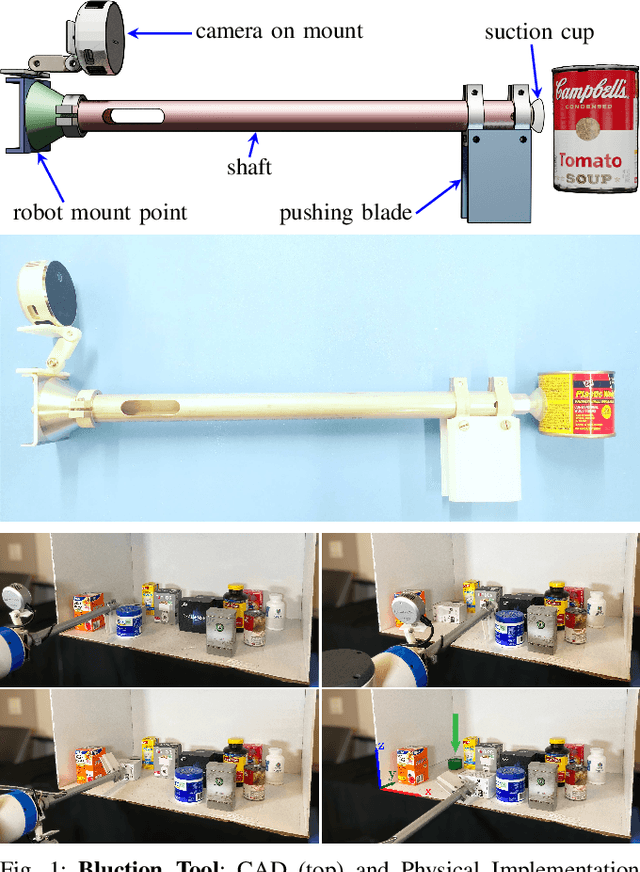
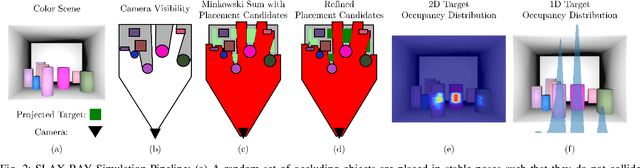
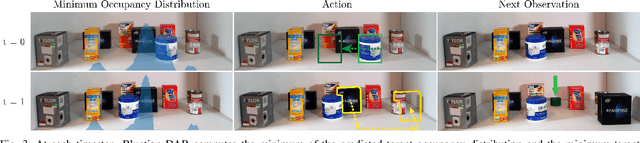
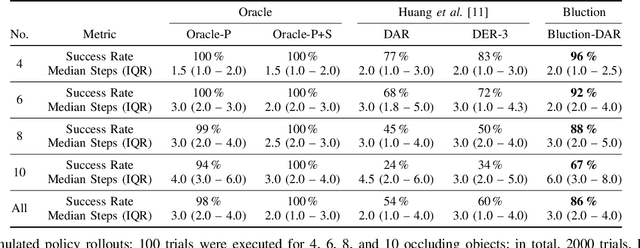
Shelves are common in homes, warehouses, and commercial settings due to their storage efficiency. However, this efficiency comes at the cost of reduced visibility and accessibility. When looking from a side (lateral) view of a shelf, most objects will be fully occluded, resulting in a constrained lateral-access mechanical search problem. To address this problem, we introduce: (1) a novel bluction tool, which combines a thin pushing blade and suction cup gripper, (2) an improved LAX-RAY simulation pipeline and perception model that combines ray-casting with 2D Minkowski sums to efficiently generate target occupancy distributions, and (3) a novel SLAX-RAY search policy, which optimally reduces target object distribution support area using the bluction tool. Experimental data from 2000 simulated shelf trials and 18 trials with a physical Fetch robot equipped with the bluction tool suggest that using suction grasping actions improves the success rate over the highest performing push-only policy by 26% in simulation and 67% in physical environments.