 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBoltzmann State-Dependent Rationality
Apr 26, 2024This paper expands on existing learned models of human behavior via a measured step in structured irrationality. Specifically, by replacing the suboptimality constant $\beta$ in a Boltzmann rationality model with a function over states $\beta(s)$, we gain natural expressivity in a computationally tractable manner. This paper discusses relevant mathematical theory, sets up several experimental designs, presents limited preliminary results, and proposes future investigations.
Precise Object Placement Using Force-Torque Feedback
Apr 26, 2024Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Natural Gradient Deep Q-learning
Mar 20, 2018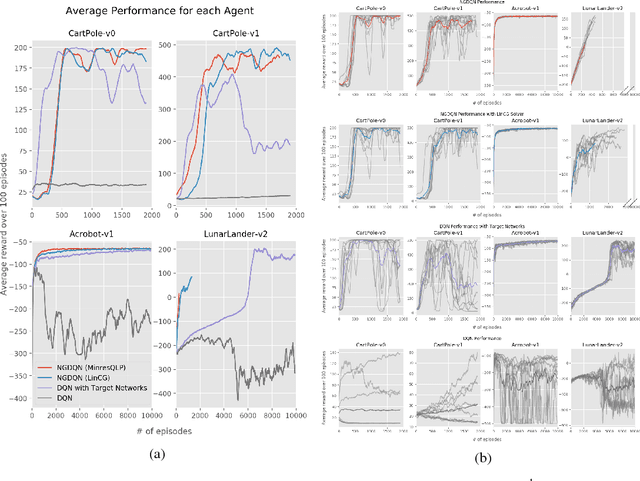



This paper presents findings for training a Q-learning reinforcement learning agent using natural gradient techniques. We compare the original deep Q-network (DQN) algorithm to its natural gradient counterpart (NGDQN), measuring NGDQN and DQN performance on classic controls environments without target networks. We find that NGDQN performs favorably relative to DQN, converging to significantly better policies faster and more frequently. These results indicate that natural gradient could be used for value function optimization in reinforcement learning to accelerate and stabilize training.