 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$π^{*}_{0.6}$: a VLA That Learns From Experience
Nov 19, 2025We study how vision-language-action (VLA) models can improve through real-world deployments via reinforcement learning (RL). We present a general-purpose method, RL with Experience and Corrections via Advantage-conditioned Policies (RECAP), that provides for RL training of VLAs via advantage conditioning. Our method incorporates heterogeneous data into the self-improvement process, including demonstrations, data from on-policy collection, and expert teleoperated interventions provided during autonomous execution. RECAP starts by pre-training a generalist VLA with offline RL, which we call $π^{*}_{0.6}$, that can then be specialized to attain high performance on downstream tasks through on-robot data collection. We show that the $π^{*}_{0.6}$ model trained with the full RECAP method can fold laundry in real homes, reliably assemble boxes, and make espresso drinks using a professional espresso machine. On some of the hardest tasks, RECAP more than doubles task throughput and roughly halves the task failure rate.
$π_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Apr 22, 2025



In order for robots to be useful, they must perform practically relevant tasks in the real world, outside of the lab. While vision-language-action (VLA) models have demonstrated impressive results for end-to-end robot control, it remains an open question how far such models can generalize in the wild. We describe $\pi_{0.5}$, a new model based on $\pi_{0}$ that uses co-training on heterogeneous tasks to enable broad generalization. $\pi_{0.5}$\ uses data from multiple robots, high-level semantic prediction, web data, and other sources to enable broadly generalizable real-world robotic manipulation. Our system uses a combination of co-training and hybrid multi-modal examples that combine image observations, language commands, object detections, semantic subtask prediction, and low-level actions. Our experiments show that this kind of knowledge transfer is essential for effective generalization, and we demonstrate for the first time that an end-to-end learning-enabled robotic system can perform long-horizon and dexterous manipulation skills, such as cleaning a kitchen or bedroom, in entirely new homes.
Hi Robot: Open-Ended Instruction Following with Hierarchical Vision-Language-Action Models
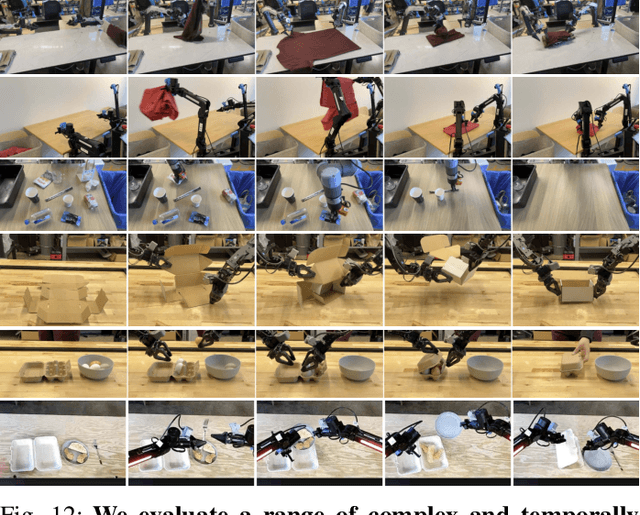
Feb 26, 2025Generalist robots that can perform a range of different tasks in open-world settings must be able to not only reason about the steps needed to accomplish their goals, but also process complex instructions, prompts, and even feedback during task execution. Intricate instructions (e.g., "Could you make me a vegetarian sandwich?" or "I don't like that one") require not just the ability to physically perform the individual steps, but the ability to situate complex commands and feedback in the physical world. In this work, we describe a system that uses vision-language models in a hierarchical structure, first reasoning over complex prompts and user feedback to deduce the most appropriate next step to fulfill the task, and then performing that step with low-level actions. In contrast to direct instruction following methods that can fulfill simple commands ("pick up the cup"), our system can reason through complex prompts and incorporate situated feedback during task execution ("that's not trash"). We evaluate our system across three robotic platforms, including single-arm, dual-arm, and dual-arm mobile robots, demonstrating its ability to handle tasks such as cleaning messy tables, making sandwiches, and grocery shopping.
$π_0$: A Vision-Language-Action Flow Model for General Robot Control
Oct 31, 2024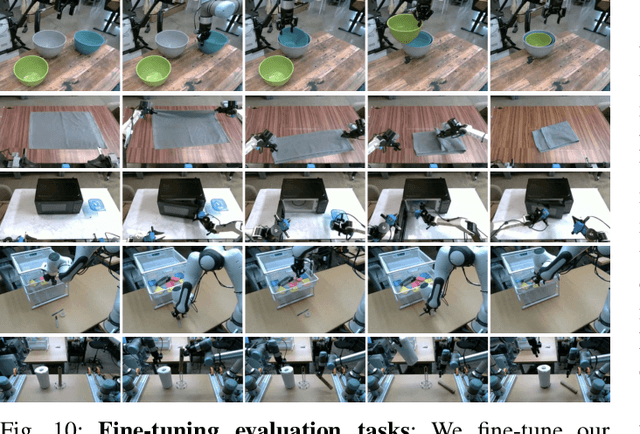
Robot learning holds tremendous promise to unlock the full potential of flexible, general, and dexterous robot systems, as well as to address some of the deepest questions in artificial intelligence. However, bringing robot learning to the level of generality required for effective real-world systems faces major obstacles in terms of data, generalization, and robustness. In this paper, we discuss how generalist robot policies (i.e., robot foundation models) can address these challenges, and how we can design effective generalist robot policies for complex and highly dexterous tasks. We propose a novel flow matching architecture built on top of a pre-trained vision-language model (VLM) to inherit Internet-scale semantic knowledge. We then discuss how this model can be trained on a large and diverse dataset from multiple dexterous robot platforms, including single-arm robots, dual-arm robots, and mobile manipulators. We evaluate our model in terms of its ability to perform tasks in zero shot after pre-training, follow language instructions from people and from a high-level VLM policy, and its ability to acquire new skills via fine-tuning. Our results cover a wide variety of tasks, such as laundry folding, table cleaning, and assembling boxes.
Precise Object Placement Using Force-Torque Feedback
Apr 26, 2024Precise object manipulation and placement is a common problem for household robots, surgery robots, and robots working on in-situ construction. Prior work using computer vision, depth sensors, and reinforcement learning lacks the ability to reactively recover from planning errors, execution errors, or sensor noise. This work introduces a method that uses force-torque sensing to robustly place objects in stable poses, even in adversarial environments. On 46 trials, our method finds success rates of 100% for basic stacking, and 17% for cases requiring adjustment.
Navigation with Large Language Models: Semantic Guesswork as a Heuristic for Planning
Oct 16, 2023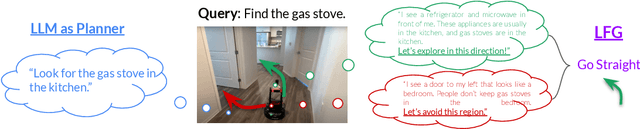
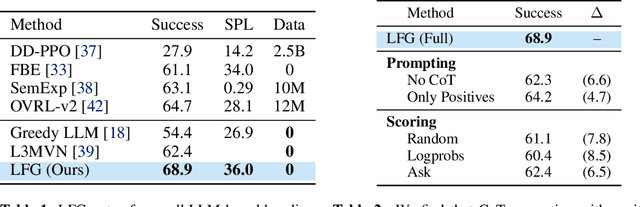
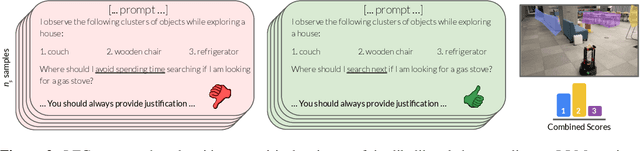
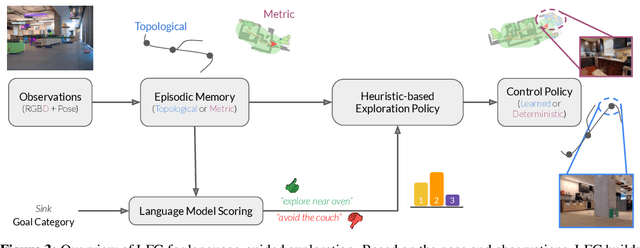
Navigation in unfamiliar environments presents a major challenge for robots: while mapping and planning techniques can be used to build up a representation of the world, quickly discovering a path to a desired goal in unfamiliar settings with such methods often requires lengthy mapping and exploration. Humans can rapidly navigate new environments, particularly indoor environments that are laid out logically, by leveraging semantics -- e.g., a kitchen often adjoins a living room, an exit sign indicates the way out, and so forth. Language models can provide robots with such knowledge, but directly using language models to instruct a robot how to reach some destination can also be impractical: while language models might produce a narrative about how to reach some goal, because they are not grounded in real-world observations, this narrative might be arbitrarily wrong. Therefore, in this paper we study how the ``semantic guesswork'' produced by language models can be utilized as a guiding heuristic for planning algorithms. Our method, Language Frontier Guide (LFG), uses the language model to bias exploration of novel real-world environments by incorporating the semantic knowledge stored in language models as a search heuristic for planning with either topological or metric maps. We evaluate LFG in challenging real-world environments and simulated benchmarks, outperforming uninformed exploration and other ways of using language models.