 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGentleHumanoid: Learning Upper-body Compliance for Contact-rich Human and Object Interaction
Nov 06, 2025Humanoid robots are expected to operate in human-centered environments where safe and natural physical interaction is essential. However, most recent reinforcement learning (RL) policies emphasize rigid tracking and suppress external forces. Existing impedance-augmented approaches are typically restricted to base or end-effector control and focus on resisting extreme forces rather than enabling compliance. We introduce GentleHumanoid, a framework that integrates impedance control into a whole-body motion tracking policy to achieve upper-body compliance. At its core is a unified spring-based formulation that models both resistive contacts (restoring forces when pressing against surfaces) and guiding contacts (pushes or pulls sampled from human motion data). This formulation ensures kinematically consistent forces across the shoulder, elbow, and wrist, while exposing the policy to diverse interaction scenarios. Safety is further supported through task-adjustable force thresholds. We evaluate our approach in both simulation and on the Unitree G1 humanoid across tasks requiring different levels of compliance, including gentle hugging, sit-to-stand assistance, and safe object manipulation. Compared to baselines, our policy consistently reduces peak contact forces while maintaining task success, resulting in smoother and more natural interactions. These results highlight a step toward humanoid robots that can safely and effectively collaborate with humans and handle objects in real-world environments.
Bagging by Learning to Singulate Layers Using Interactive Perception
Mar 29, 2023Many fabric handling and 2D deformable material tasks in homes and industry require singulating layers of material such as opening a bag or arranging garments for sewing. In contrast to methods requiring specialized sensing or end effectors, we use only visual observations with ordinary parallel jaw grippers. We propose SLIP: Singulating Layers using Interactive Perception, and apply SLIP to the task of autonomous bagging. We develop SLIP-Bagging, a bagging algorithm that manipulates a plastic or fabric bag from an unstructured state, and uses SLIP to grasp the top layer of the bag to open it for object insertion. In physical experiments, a YuMi robot achieves a success rate of 67% to 81% across bags of a variety of materials, shapes, and sizes, significantly improving in success rate and generality over prior work. Experiments also suggest that SLIP can be applied to tasks such as singulating layers of folded cloth and garments. Supplementary material is available at https://sites.google.com/view/slip-bagging/.
Automating Vascular Shunt Insertion with the dVRK Surgical Robot
Nov 04, 2022Vascular shunt insertion is a fundamental surgical procedure used to temporarily restore blood flow to tissues. It is often performed in the field after major trauma. We formulate a problem of automated vascular shunt insertion and propose a pipeline to perform Automated Vascular Shunt Insertion (AVSI) using a da Vinci Research Kit. The pipeline uses a learned visual model to estimate the locus of the vessel rim, plans a grasp on the rim, and moves to grasp at that point. The first robot gripper then pulls the rim to stretch open the vessel with a dilation motion. The second robot gripper then proceeds to insert a shunt into the vessel phantom (a model of the blood vessel) with a chamfer tilt followed by a screw motion. Results suggest that AVSI achieves a high success rate even with tight tolerances and varying vessel orientations up to 30{\deg}. Supplementary material, dataset, videos, and visualizations can be found at https://sites.google.com/berkeley.edu/autolab-avsi.
AutoBag: Learning to Open Plastic Bags and Insert Objects
Oct 31, 2022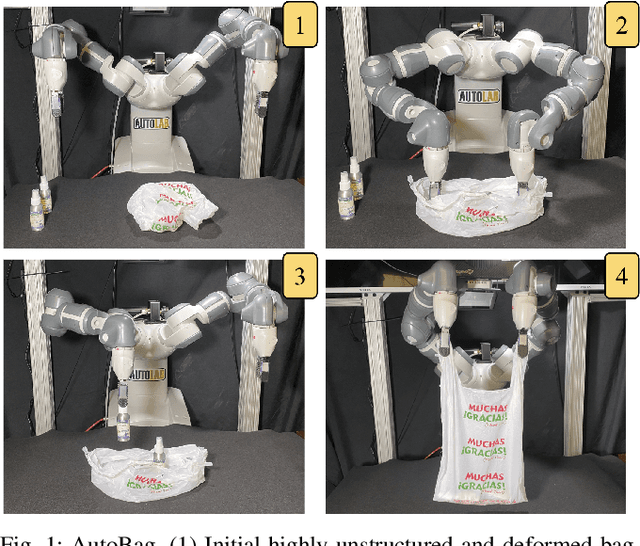
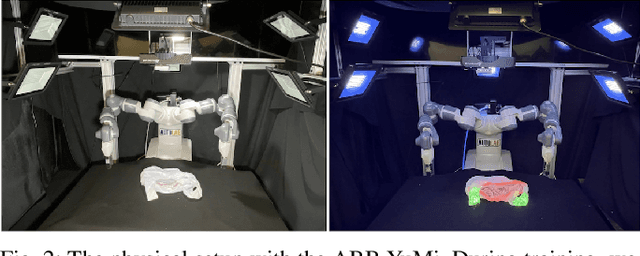

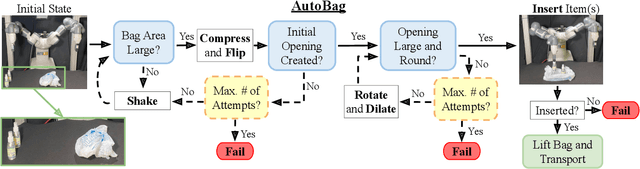
Thin plastic bags are ubiquitous in retail stores, healthcare, food handling, recycling, homes, and school lunchrooms. They are challenging both for perception (due to specularities and occlusions) and for manipulation (due to the dynamics of their 3D deformable structure). We formulate the task of manipulating common plastic shopping bags with two handles from an unstructured initial state to a state where solid objects can be inserted into the bag for transport. We propose a self-supervised learning framework where a dual-arm robot learns to recognize the handles and rim of plastic bags using UV-fluorescent markings; at execution time, the robot does not use UV markings or UV light. We propose Autonomous Bagging (AutoBag), where the robot uses the learned perception model to open plastic bags through iterative manipulation. We present novel metrics to evaluate the quality of a bag state and new motion primitives for reorienting and opening bags from visual observations. In physical experiments, a YuMi robot using AutoBag is able to open bags and achieve a success rate of 16/30 for inserting at least one item across a variety of initial bag configurations. Supplementary material is available at https://sites.google.com/view/autobag .