 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomating Deformable Gasket Assembly
Aug 22, 2024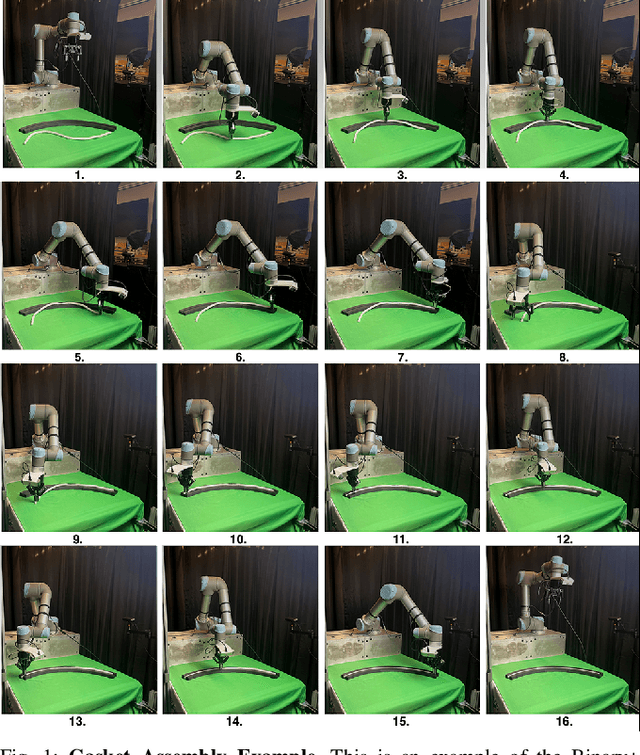
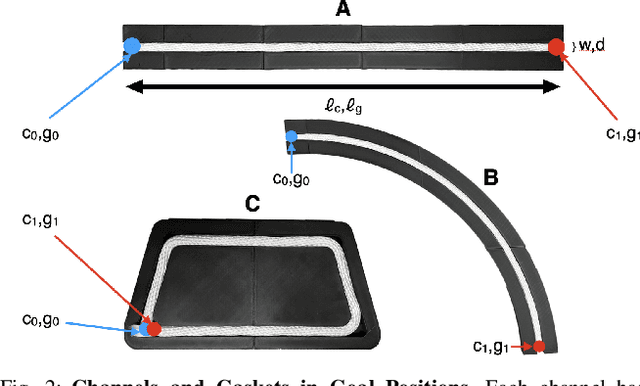
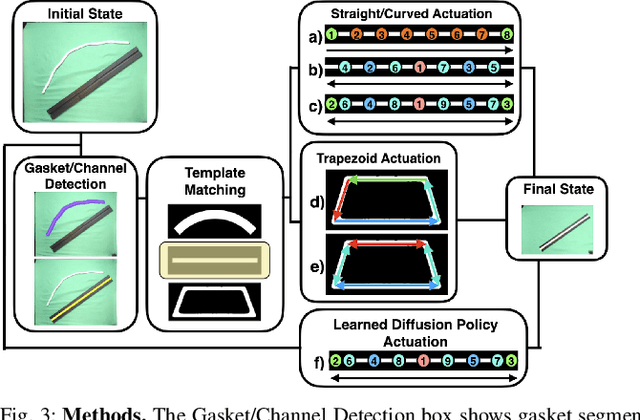
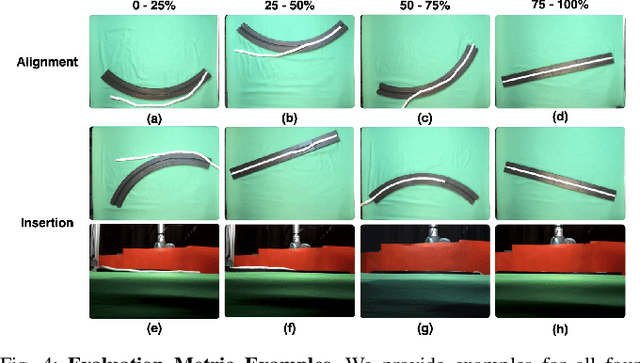
In Gasket Assembly, a deformable gasket must be aligned and pressed into a narrow channel. This task is common for sealing surfaces in the manufacturing of automobiles, appliances, electronics, and other products. Gasket Assembly is a long-horizon, high-precision task and the gasket must align with the channel and be fully pressed in to achieve a secure fit. To compare approaches, we present 4 methods for Gasket Assembly: one policy from deep imitation learning and three procedural algorithms. We evaluate these methods with 100 physical trials. Results suggest that the Binary+ algorithm succeeds in 10/10 on the straight channel whereas the learned policy based on 250 human teleoperated demonstrations succeeds in 8/10 trials and is significantly slower. Code, CAD models, videos, and data can be found at https://berkeleyautomation.github.io/robot-gasket/
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Bagging by Learning to Singulate Layers Using Interactive Perception
Mar 29, 2023Many fabric handling and 2D deformable material tasks in homes and industry require singulating layers of material such as opening a bag or arranging garments for sewing. In contrast to methods requiring specialized sensing or end effectors, we use only visual observations with ordinary parallel jaw grippers. We propose SLIP: Singulating Layers using Interactive Perception, and apply SLIP to the task of autonomous bagging. We develop SLIP-Bagging, a bagging algorithm that manipulates a plastic or fabric bag from an unstructured state, and uses SLIP to grasp the top layer of the bag to open it for object insertion. In physical experiments, a YuMi robot achieves a success rate of 67% to 81% across bags of a variety of materials, shapes, and sizes, significantly improving in success rate and generality over prior work. Experiments also suggest that SLIP can be applied to tasks such as singulating layers of folded cloth and garments. Supplementary material is available at https://sites.google.com/view/slip-bagging/.