 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Trace and Untangle Semi-planar Knots
Mar 15, 2023



This paper extends prior work on untangling long cables and presents TUSK (Tracing to Untangle Semi-planar Knots), a learned cable-tracing algorithm that resolves over-crossings and undercrossings to recognize the structure of knots and grasp points for untangling from a single RGB image. This work focuses on semi-planar knots, which are knots composed of crossings that each include at most 2 cable segments. We conduct experiments on long cables (3 m in length) with up to 15 semi-planar crossings across 6 different knot types. Crops of crossings from 3 knots (overhand, figure 8, and bowline) of the 6 are seen during training, but none of the full knots are seen during training. This is an improvement from prior work on long cables that can only untangle 2 knot types. Experiments find that in settings with multiple identical cables, TUSK can trace a single cable with 81% accuracy on 7 new knot types. In single-cable images, TUSK can trace and identify the correct knot with 77% success on 3 new knot types. We incorporate TUSK into a bimanual robot system and find that it successfully untangles 64% of cable configurations, including those with new knots unseen during training, across 3 levels of difficulty. Supplementary material, including an annotated dataset of 500 RGB-D images of a knotted cable along with ground-truth traces, can be found at https://sites.google.com/view/tusk-rss.
Learning to Efficiently Plan Robust Frictional Multi-Object Grasps
Oct 13, 2022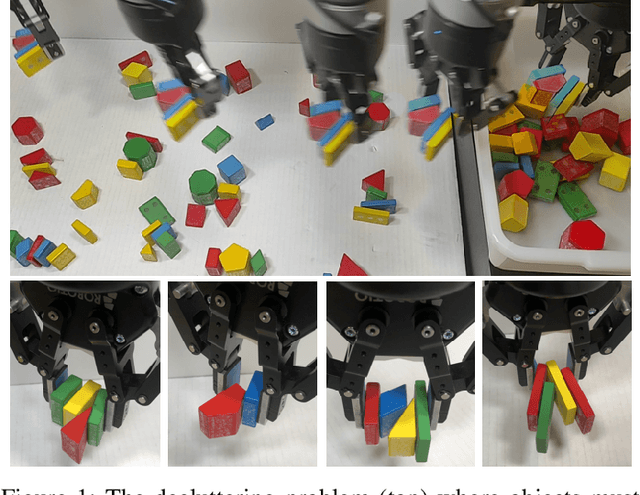

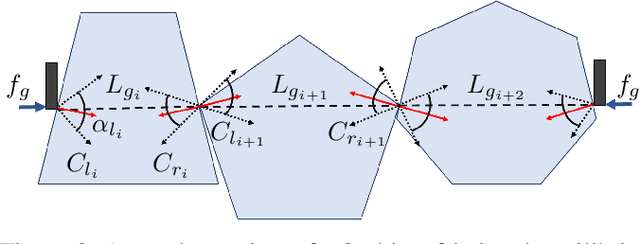
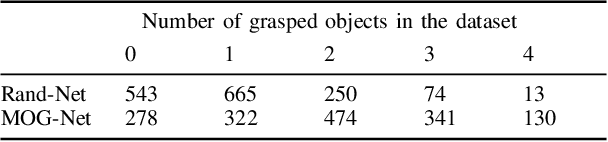
We consider a decluttering problem where multiple rigid convex polygonal objects rest in randomly placed positions and orientations on a planar surface and must be efficiently transported to a packing box using both single and multi-object grasps. Prior work considered frictionless multi-object grasping. In this paper, we introduce friction to increase picks per hour. We train a neural network using real examples to plan robust multi-object grasps. In physical experiments, we find an 11.7% increase in success rates, a 1.7x increase in picks per hour, and an 8.2x decrease in grasp planning time compared to prior work on multi-object grasping. Videos are available at https://youtu.be/pEZpHX5FZIs.