 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAll You Need is LUV: Unsupervised Collection of Labeled Images using Invisible UV Fluorescent Indicators
Paper and Code
Mar 13, 2022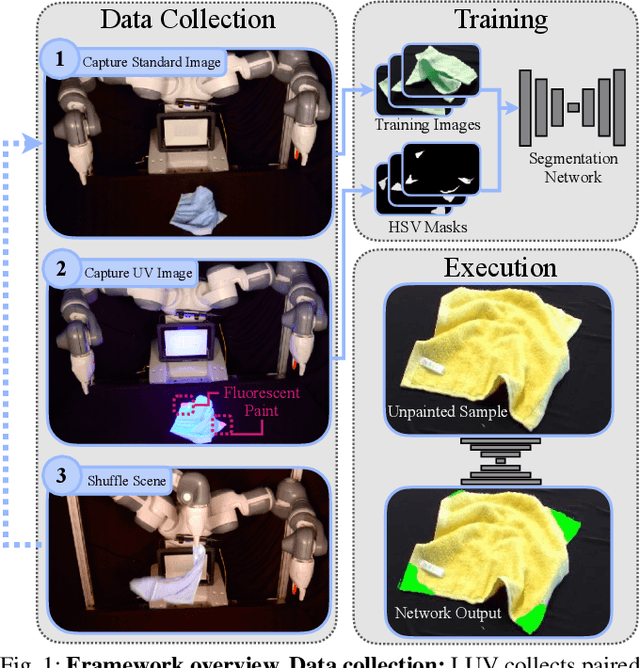
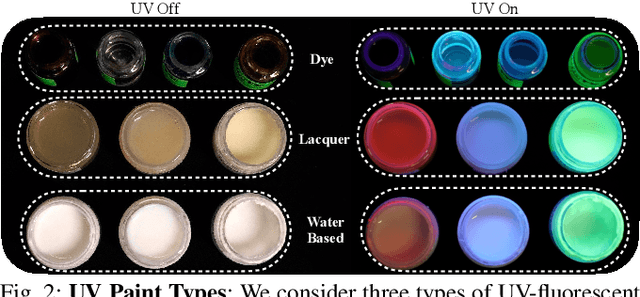
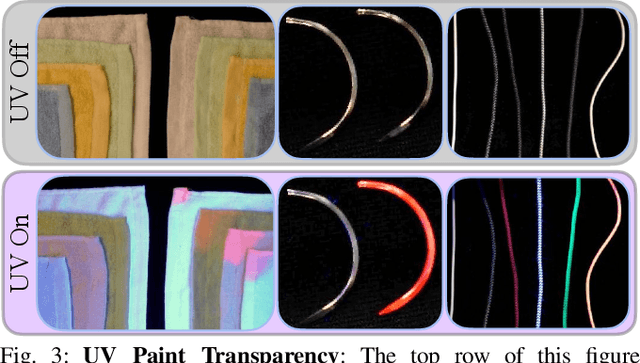
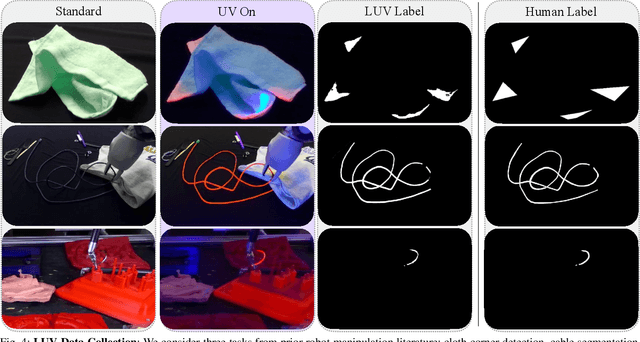
Large-scale semantic image annotation is a significant challenge for learning-based perception systems in robotics. Current approaches often rely on human labelers, which can be expensive, or simulation data, which can visually or physically differ from real data. This paper proposes Labels from UltraViolet (LUV), a novel framework that enables rapid, labeled data collection in real manipulation environments without human labeling. LUV uses transparent, ultraviolet-fluorescent paint with programmable ultraviolet LEDs to collect paired images of a scene in standard lighting and UV lighting to autonomously extract segmentation masks and keypoints via color segmentation. We apply LUV to a suite of diverse robot perception tasks to evaluate its labeling quality, flexibility, and data collection rate. Results suggest that LUV is 180-2500 times faster than a human labeler across the tasks. We show that LUV provides labels consistent with human annotations on unpainted test images. The networks trained on these labels are used to smooth and fold crumpled towels with 83% success rate and achieve 1.7mm position error with respect to human labels on a surgical needle pose estimation task. The low cost of LUV makes it ideal as a lightweight replacement for human labeling systems, with the one-time setup costs at $300 equivalent to the cost of collecting around 200 semantic segmentation labels on Amazon Mechanical Turk. Code, datasets, visualizations, and supplementary material can be found at https://sites.google.com/berkeley.edu/luv