 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Representation Matters: Improving Perception and Exploration for Robotics
Nov 03, 2020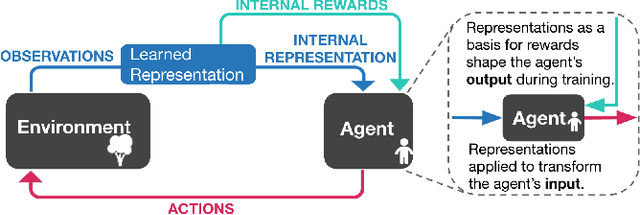
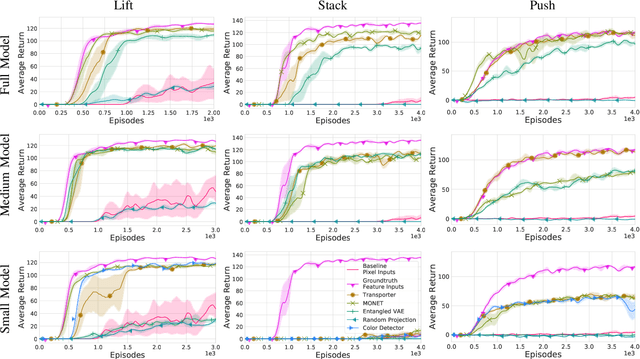
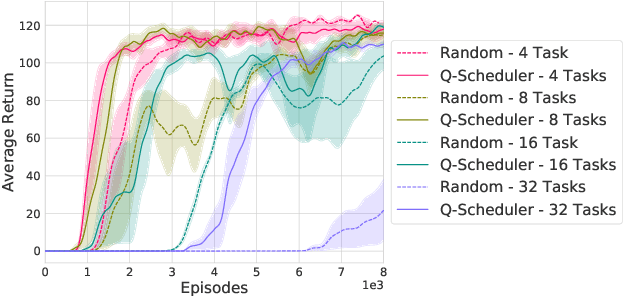
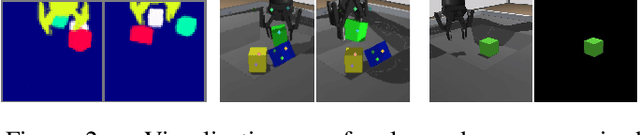
Projecting high-dimensional environment observations into lower-dimensional structured representations can considerably improve data-efficiency for reinforcement learning in domains with limited data such as robotics. Can a single generally useful representation be found? In order to answer this question, it is important to understand how the representation will be used by the agent and what properties such a 'good' representation should have. In this paper we systematically evaluate a number of common learnt and hand-engineered representations in the context of three robotics tasks: lifting, stacking and pushing of 3D blocks. The representations are evaluated in two use-cases: as input to the agent, or as a source of auxiliary tasks. Furthermore, the value of each representation is evaluated in terms of three properties: dimensionality, observability and disentanglement. We can significantly improve performance in both use-cases and demonstrate that some representations can perform commensurate to simulator states as agent inputs. Finally, our results challenge common intuitions by demonstrating that: 1) dimensionality strongly matters for task generation, but is negligible for inputs, 2) observability of task-relevant aspects mostly affects the input representation use-case, and 3) disentanglement leads to better auxiliary tasks, but has only limited benefits for input representations. This work serves as a step towards a more systematic understanding of what makes a 'good' representation for control in robotics, enabling practitioners to make more informed choices for developing new learned or hand-engineered representations.
Disentangled Cumulants Help Successor Representations Transfer to New Tasks
Nov 25, 2019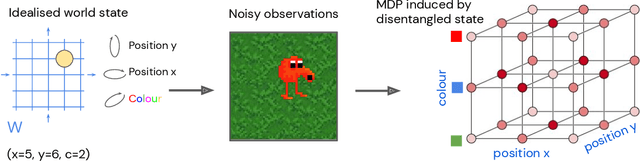
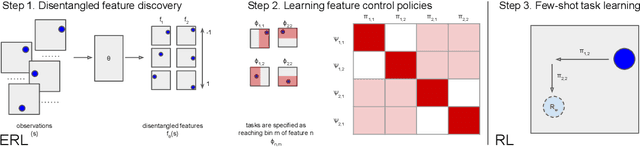
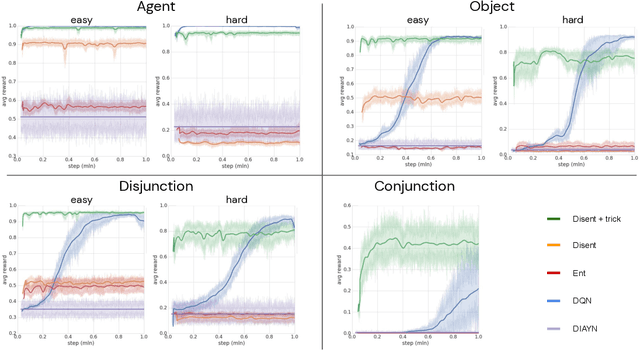
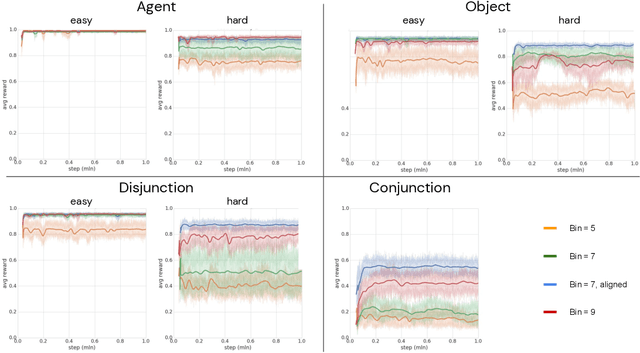
Biological intelligence can learn to solve many diverse tasks in a data efficient manner by re-using basic knowledge and skills from one task to another. Furthermore, many of such skills are acquired without explicit supervision in an intrinsically driven fashion. This is in contrast to the state-of-the-art reinforcement learning agents, which typically start learning each new task from scratch and struggle with knowledge transfer. In this paper we propose a principled way to learn a basis set of policies, which, when recombined through generalised policy improvement, come with guarantees on the coverage of the final task space. In particular, we concentrate on solving goal-based downstream tasks where the execution order of actions is not important. We demonstrate both theoretically and empirically that learning a small number of policies that reach intrinsically specified goal regions in a disentangled latent space can be re-used to quickly achieve a high level of performance on an exponentially larger number of externally specified, often significantly more complex downstream tasks. Our learning pipeline consists of two stages. First, the agent learns to perform intrinsically generated, goal-based tasks in the total absence of environmental rewards. Second, the agent leverages this experience to quickly achieve a high level of performance on numerous diverse externally specified tasks.
The StreetLearn Environment and Dataset
Mar 04, 2019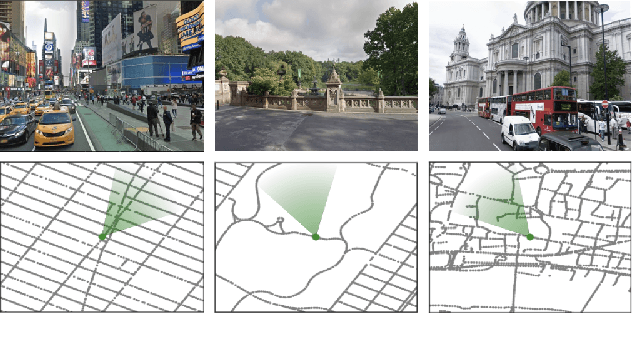

Navigation is a rich and well-grounded problem domain that drives progress in many different areas of research: perception, planning, memory, exploration, and optimisation in particular. Historically these challenges have been separately considered and solutions built that rely on stationary datasets - for example, recorded trajectories through an environment. These datasets cannot be used for decision-making and reinforcement learning, however, and in general the perspective of navigation as an interactive learning task, where the actions and behaviours of a learning agent are learned simultaneously with the perception and planning, is relatively unsupported. Thus, existing navigation benchmarks generally rely on static datasets (Geiger et al., 2013; Kendall et al., 2015) or simulators (Beattie et al., 2016; Shah et al., 2018). To support and validate research in end-to-end navigation, we present StreetLearn: an interactive, first-person, partially-observed visual environment that uses Google Street View for its photographic content and broad coverage, and give performance baselines for a challenging goal-driven navigation task. The environment code, baseline agent code, and the dataset are available at http://streetlearn.cc
Meta-Learning by the Baldwin Effect
Jun 22, 2018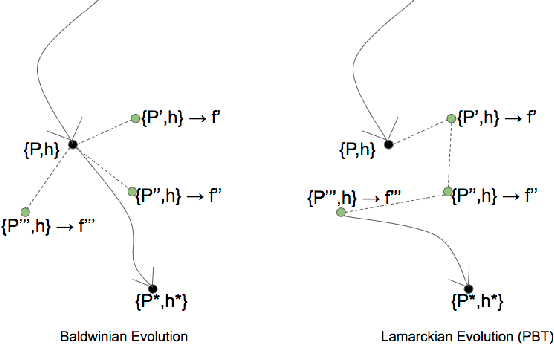
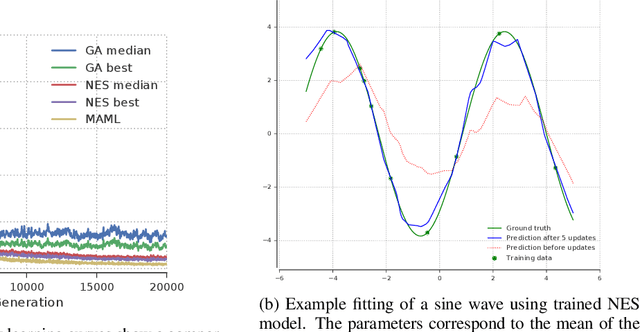
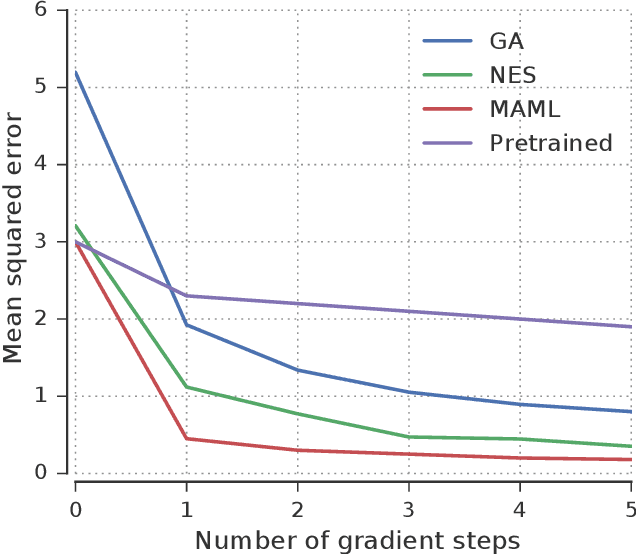
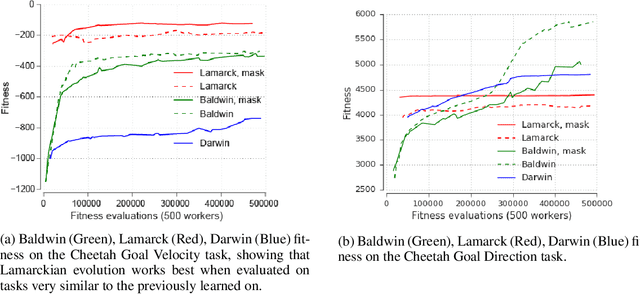
The scope of the Baldwin effect was recently called into question by two papers that closely examined the seminal work of Hinton and Nowlan. To this date there has been no demonstration of its necessity in empirically challenging tasks. Here we show that the Baldwin effect is capable of evolving few-shot supervised and reinforcement learning mechanisms, by shaping the hyperparameters and the initial parameters of deep learning algorithms. Furthermore it can genetically accommodate strong learning biases on the same set of problems as a recent machine learning algorithm called MAML "Model Agnostic Meta-Learning" which uses second-order gradients instead of evolution to learn a set of reference parameters (initial weights) that can allow rapid adaptation to tasks sampled from a distribution. Whilst in simple cases MAML is more data efficient than the Baldwin effect, the Baldwin effect is more general in that it does not require gradients to be backpropagated to the reference parameters or hyperparameters, and permits effectively any number of gradient updates in the inner loop. The Baldwin effect learns strong learning dependent biases, rather than purely genetically accommodating fixed behaviours in a learning independent manner.
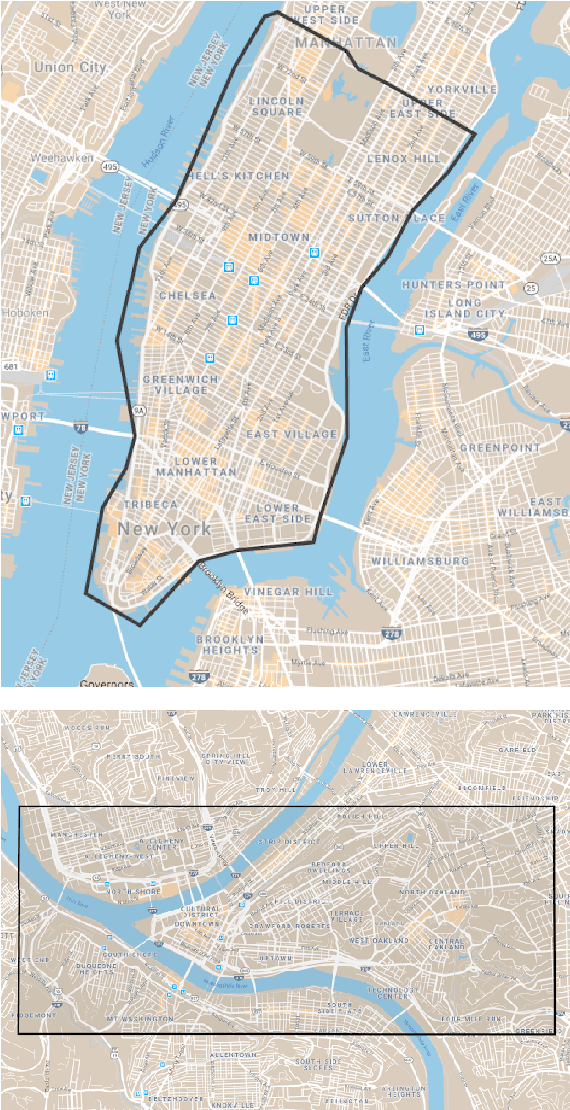
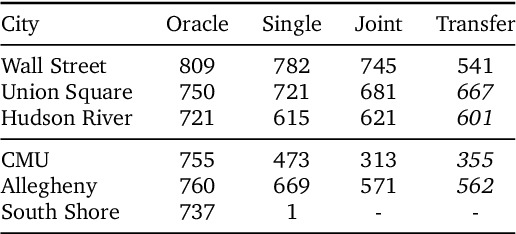
Learning to Navigate in Cities Without a Map
Apr 17, 2018
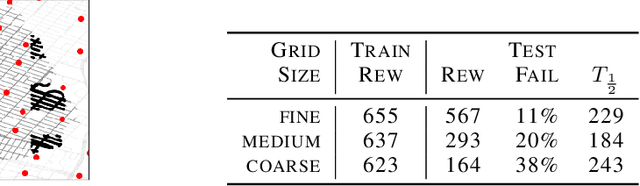

Navigating through unstructured environments is a basic capability of intelligent creatures, and thus is of fundamental interest in the study and development of artificial intelligence. Long-range navigation is a complex cognitive task that relies on developing an internal representation of space, grounded by recognisable landmarks and robust visual processing, that can simultaneously support continuous self-localisation ("I am here") and a representation of the goal ("I am going there"). Building upon recent research that applies deep reinforcement learning to maze navigation problems, we present an end-to-end deep reinforcement learning approach that can be applied on a city scale. Recognising that successful navigation relies on integration of general policies with locale-specific knowledge, we propose a dual pathway architecture that allows locale-specific features to be encapsulated, while still enabling transfer to multiple cities. We present an interactive navigation environment that uses Google StreetView for its photographic content and worldwide coverage, and demonstrate that our learning method allows agents to learn to navigate multiple cities and to traverse to target destinations that may be kilometres away. A video summarizing our research and showing the trained agent in diverse city environments as well as on the transfer task is available at: https://sites.google.com/view/streetlearn.
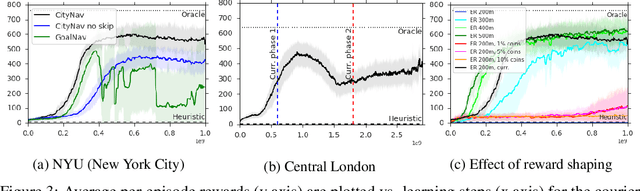
Grounded Language Learning in a Simulated 3D World
Jun 26, 2017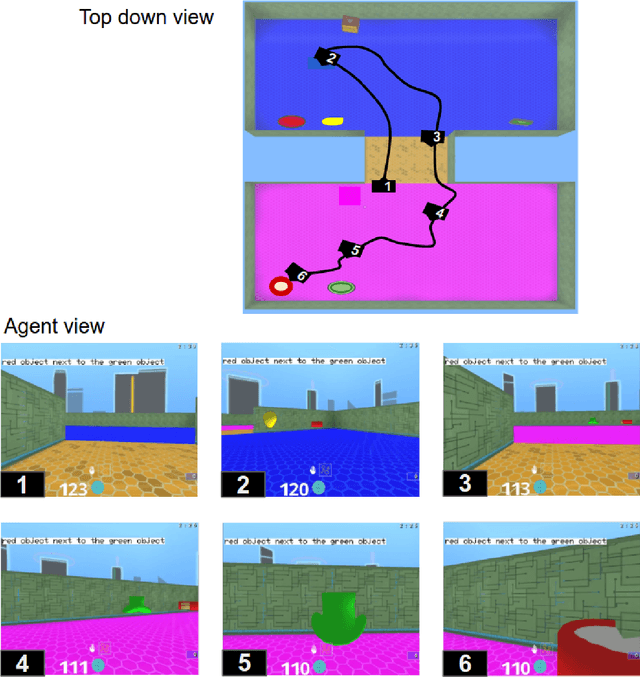
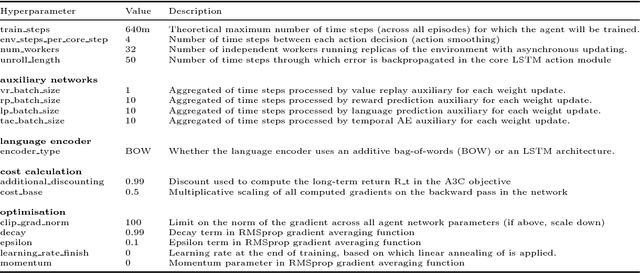
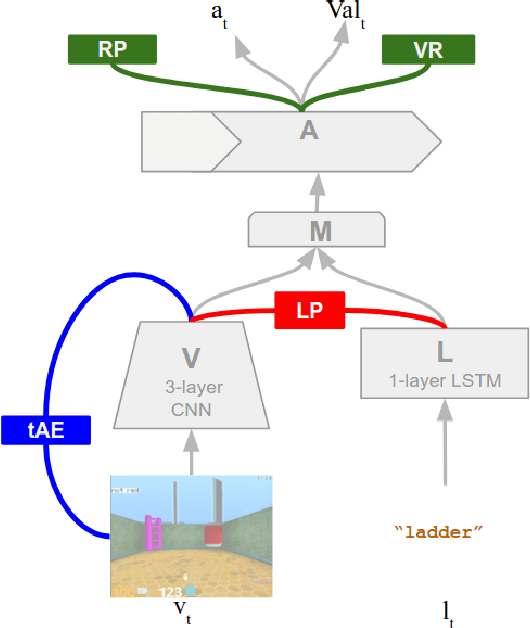
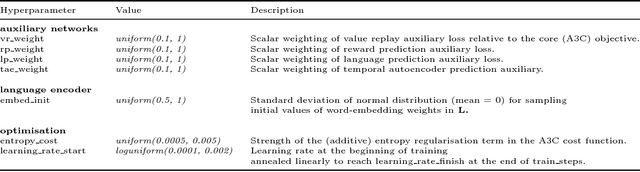
We are increasingly surrounded by artificially intelligent technology that takes decisions and executes actions on our behalf. This creates a pressing need for general means to communicate with, instruct and guide artificial agents, with human language the most compelling means for such communication. To achieve this in a scalable fashion, agents must be able to relate language to the world and to actions; that is, their understanding of language must be grounded and embodied. However, learning grounded language is a notoriously challenging problem in artificial intelligence research. Here we present an agent that learns to interpret language in a simulated 3D environment where it is rewarded for the successful execution of written instructions. Trained via a combination of reinforcement and unsupervised learning, and beginning with minimal prior knowledge, the agent learns to relate linguistic symbols to emergent perceptual representations of its physical surroundings and to pertinent sequences of actions. The agent's comprehension of language extends beyond its prior experience, enabling it to apply familiar language to unfamiliar situations and to interpret entirely novel instructions. Moreover, the speed with which this agent learns new words increases as its semantic knowledge grows. This facility for generalising and bootstrapping semantic knowledge indicates the potential of the present approach for reconciling ambiguous natural language with the complexity of the physical world.
DeepMind Lab
Dec 13, 2016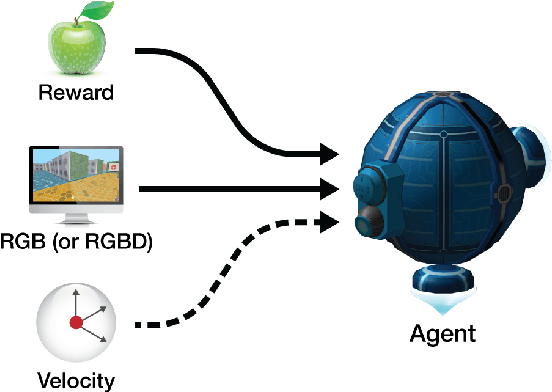
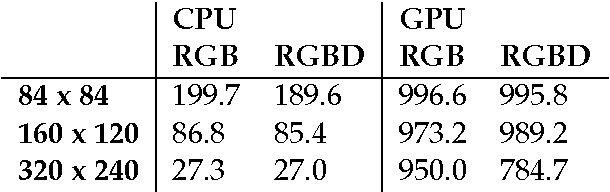
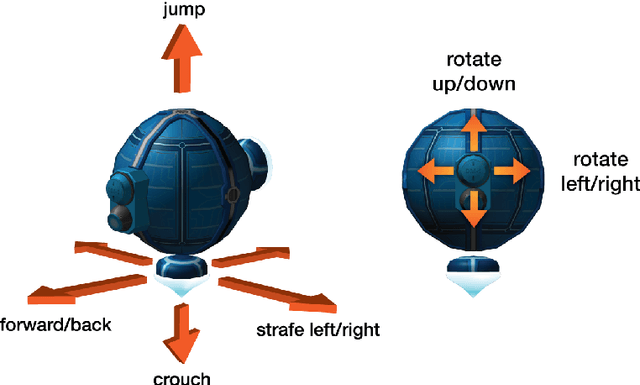
DeepMind Lab is a first-person 3D game platform designed for research and development of general artificial intelligence and machine learning systems. DeepMind Lab can be used to study how autonomous artificial agents may learn complex tasks in large, partially observed, and visually diverse worlds. DeepMind Lab has a simple and flexible API enabling creative task-designs and novel AI-designs to be explored and quickly iterated upon. It is powered by a fast and widely recognised game engine, and tailored for effective use by the research community.