 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe StreetLearn Environment and Dataset
Mar 04, 2019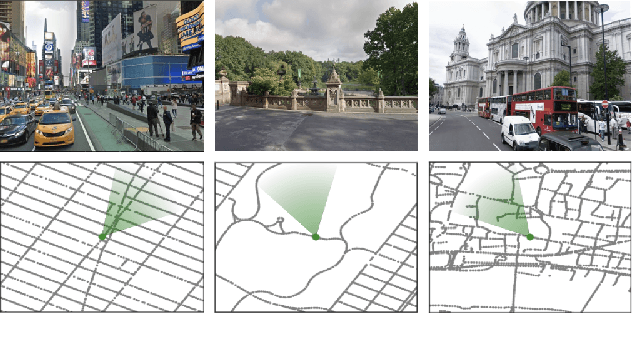

Navigation is a rich and well-grounded problem domain that drives progress in many different areas of research: perception, planning, memory, exploration, and optimisation in particular. Historically these challenges have been separately considered and solutions built that rely on stationary datasets - for example, recorded trajectories through an environment. These datasets cannot be used for decision-making and reinforcement learning, however, and in general the perspective of navigation as an interactive learning task, where the actions and behaviours of a learning agent are learned simultaneously with the perception and planning, is relatively unsupported. Thus, existing navigation benchmarks generally rely on static datasets (Geiger et al., 2013; Kendall et al., 2015) or simulators (Beattie et al., 2016; Shah et al., 2018). To support and validate research in end-to-end navigation, we present StreetLearn: an interactive, first-person, partially-observed visual environment that uses Google Street View for its photographic content and broad coverage, and give performance baselines for a challenging goal-driven navigation task. The environment code, baseline agent code, and the dataset are available at http://streetlearn.cc
Learning To Follow Directions in Street View
Mar 01, 2019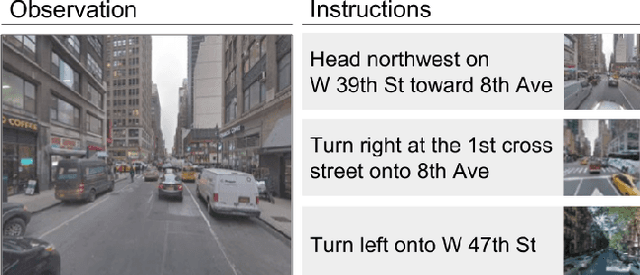

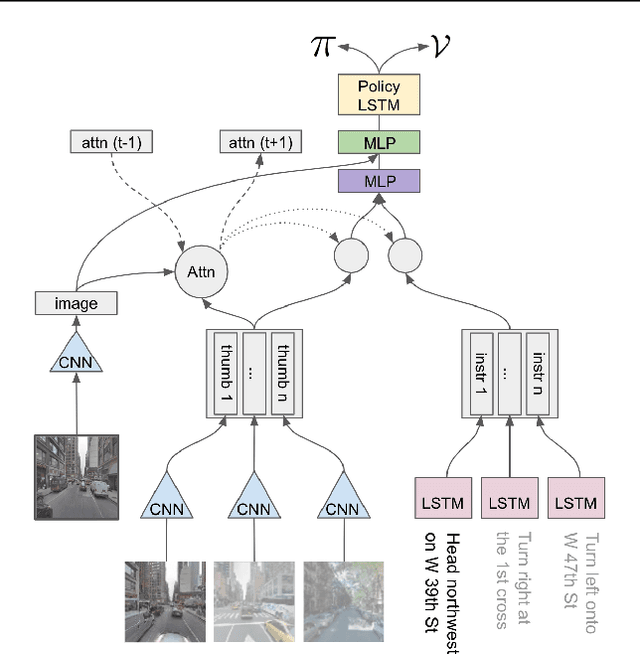
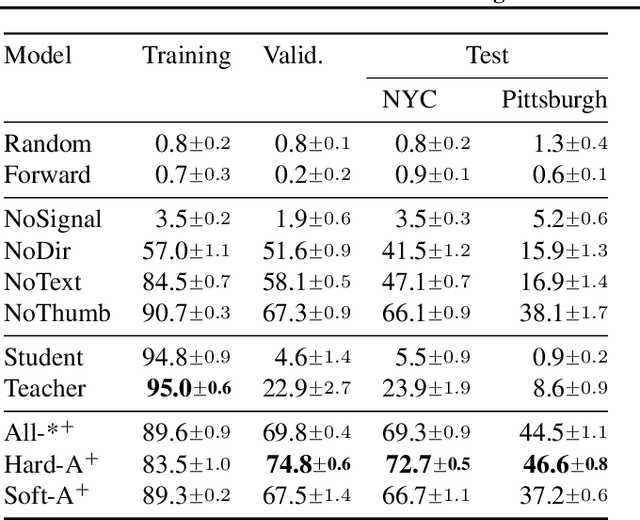
Navigating and understanding the real world remains a key challenge in machine learning and inspires a great variety of research in areas such as language grounding, planning, navigation and computer vision. We propose an instruction-following task that requires all of the above, and which combines the practicality of simulated environments with the challenges of ambiguous, noisy real world data. StreetNav is built on top of Google Street View and provides visually accurate environments representing real places. Agents are given driving instructions which they must learn to interpret in order to successfully navigate in this environment. Since humans equipped with driving instructions can readily navigate in previously unseen cities, we set a high bar and test our trained agents for similar cognitive capabilities. Although deep reinforcement learning (RL) methods are frequently evaluated only on data that closely follow the training distribution, our dataset extends to multiple cities and has a clean train/test separation. This allows for thorough testing of generalisation ability. This paper presents the StreetNav environment and tasks, a set of novel models that establish strong baselines, and analysis of the task and the trained agents.
Pushing the bounds of dropout
Sep 27, 2018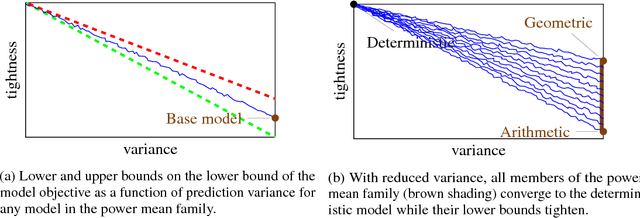

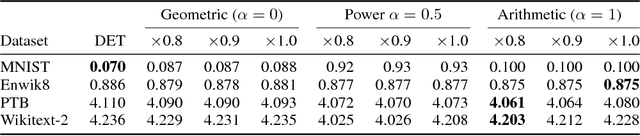
We show that dropout training is best understood as performing MAP estimation concurrently for a family of conditional models whose objectives are themselves lower bounded by the original dropout objective. This discovery allows us to pick any model from this family after training, which leads to a substantial improvement on regularisation-heavy language modelling. The family includes models that compute a power mean over the sampled dropout masks, and their less stochastic subvariants with tighter and higher lower bounds than the fully stochastic dropout objective. We argue that since the deterministic subvariant's bound is equal to its objective, and the highest amongst these models, the predominant view of it as a good approximation to MC averaging is misleading. Rather, deterministic dropout is the best available approximation to the true objective.
Encoding Spatial Relations from Natural Language
Jul 05, 2018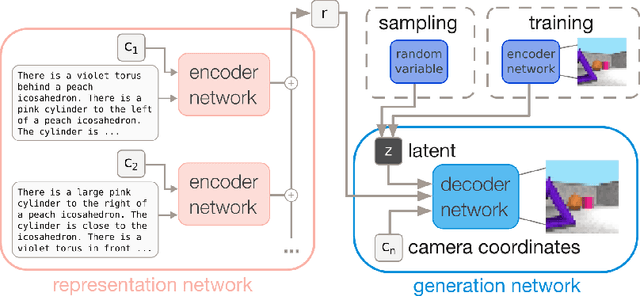
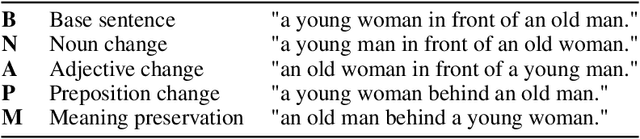
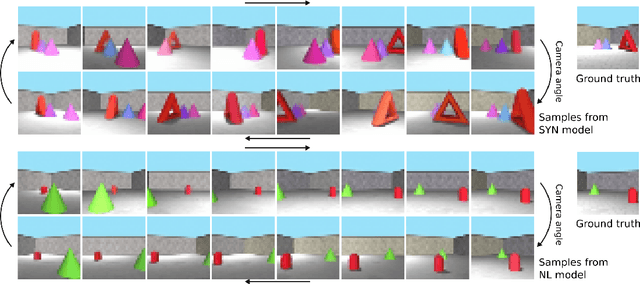
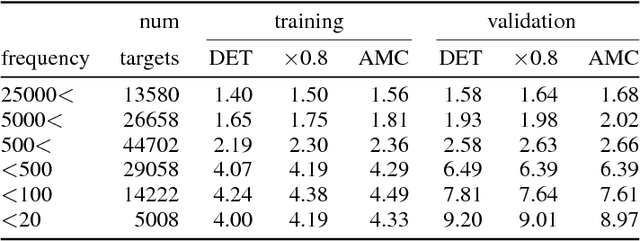
Natural language processing has made significant inroads into learning the semantics of words through distributional approaches, however representations learnt via these methods fail to capture certain kinds of information implicit in the real world. In particular, spatial relations are encoded in a way that is inconsistent with human spatial reasoning and lacking invariance to viewpoint changes. We present a system capable of capturing the semantics of spatial relations such as behind, left of, etc from natural language. Our key contributions are a novel multi-modal objective based on generating images of scenes from their textual descriptions, and a new dataset on which to train it. We demonstrate that internal representations are robust to meaning preserving transformations of descriptions (paraphrase invariance), while viewpoint invariance is an emergent property of the system.
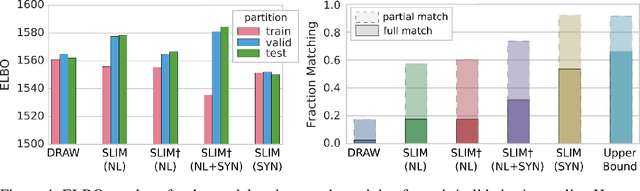
Hyperbolic Attention Networks
May 24, 2018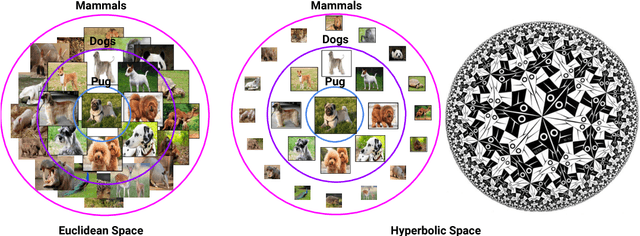
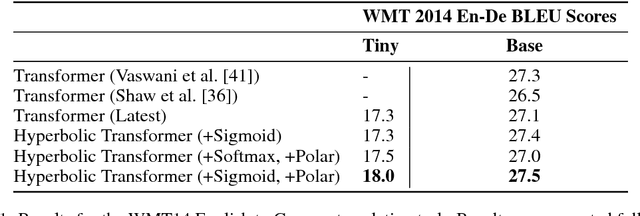
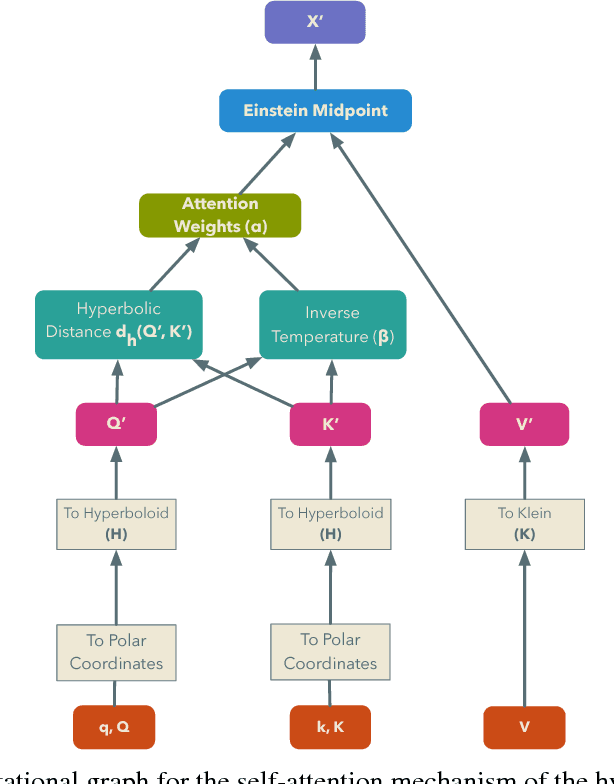
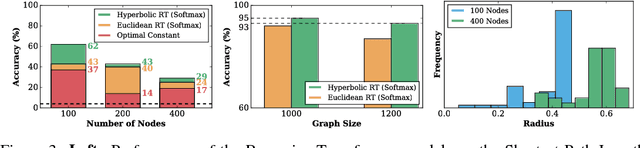
We introduce hyperbolic attention networks to endow neural networks with enough capacity to match the complexity of data with hierarchical and power-law structure. A few recent approaches have successfully demonstrated the benefits of imposing hyperbolic geometry on the parameters of shallow networks. We extend this line of work by imposing hyperbolic geometry on the activations of neural networks. This allows us to exploit hyperbolic geometry to reason about embeddings produced by deep networks. We achieve this by re-expressing the ubiquitous mechanism of soft attention in terms of operations defined for hyperboloid and Klein models. Our method shows improvements in terms of generalization on neural machine translation, learning on graphs and visual question answering tasks while keeping the neural representations compact.
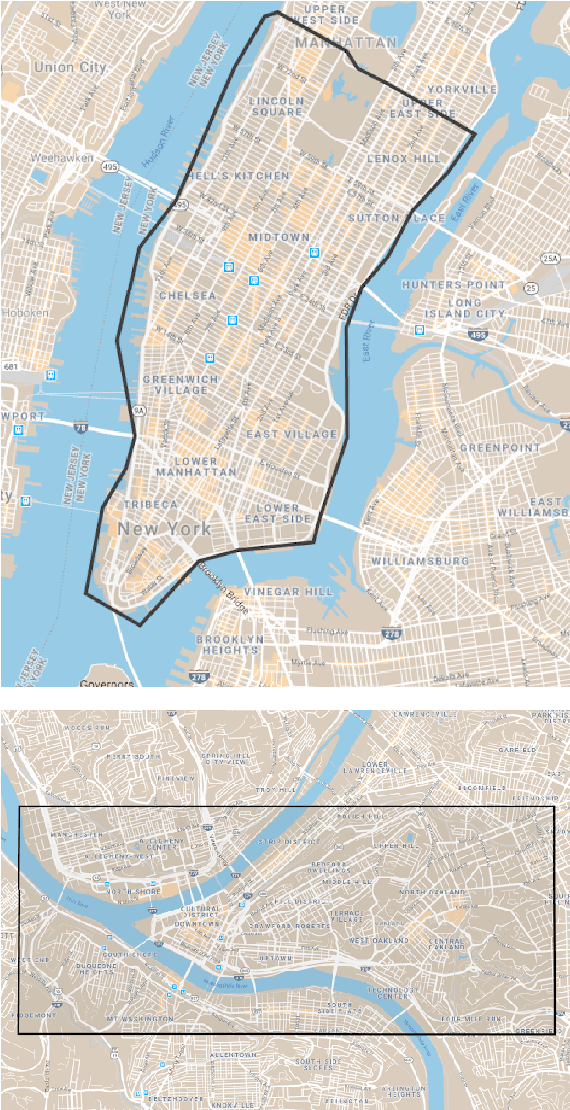
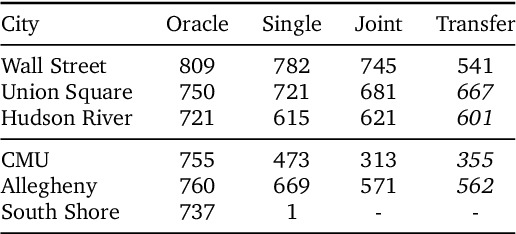
Learning to Navigate in Cities Without a Map
Apr 17, 2018
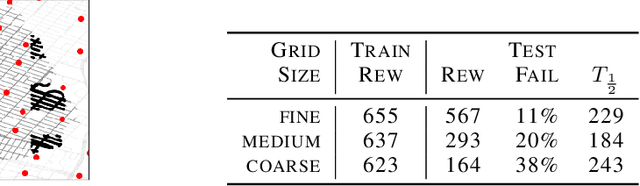

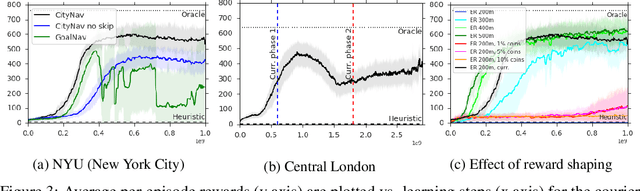
Navigating through unstructured environments is a basic capability of intelligent creatures, and thus is of fundamental interest in the study and development of artificial intelligence. Long-range navigation is a complex cognitive task that relies on developing an internal representation of space, grounded by recognisable landmarks and robust visual processing, that can simultaneously support continuous self-localisation ("I am here") and a representation of the goal ("I am going there"). Building upon recent research that applies deep reinforcement learning to maze navigation problems, we present an end-to-end deep reinforcement learning approach that can be applied on a city scale. Recognising that successful navigation relies on integration of general policies with locale-specific knowledge, we propose a dual pathway architecture that allows locale-specific features to be encapsulated, while still enabling transfer to multiple cities. We present an interactive navigation environment that uses Google StreetView for its photographic content and worldwide coverage, and demonstrate that our learning method allows agents to learn to navigate multiple cities and to traverse to target destinations that may be kilometres away. A video summarizing our research and showing the trained agent in diverse city environments as well as on the transfer task is available at: https://sites.google.com/view/streetlearn.
Emergence of Linguistic Communication from Referential Games with Symbolic and Pixel Input
Apr 11, 2018

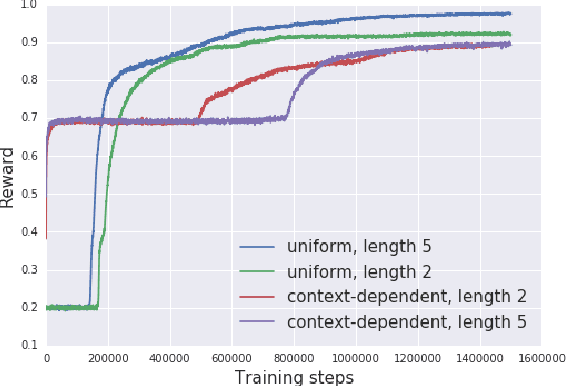

The ability of algorithms to evolve or learn (compositional) communication protocols has traditionally been studied in the language evolution literature through the use of emergent communication tasks. Here we scale up this research by using contemporary deep learning methods and by training reinforcement-learning neural network agents on referential communication games. We extend previous work, in which agents were trained in symbolic environments, by developing agents which are able to learn from raw pixel data, a more challenging and realistic input representation. We find that the degree of structure found in the input data affects the nature of the emerged protocols, and thereby corroborate the hypothesis that structured compositional language is most likely to emerge when agents perceive the world as being structured.
The NarrativeQA Reading Comprehension Challenge
Dec 19, 2017Reading comprehension (RC)---in contrast to information retrieval---requires integrating information and reasoning about events, entities, and their relations across a full document. Question answering is conventionally used to assess RC ability, in both artificial agents and children learning to read. However, existing RC datasets and tasks are dominated by questions that can be solved by selecting answers using superficial information (e.g., local context similarity or global term frequency); they thus fail to test for the essential integrative aspect of RC. To encourage progress on deeper comprehension of language, we present a new dataset and set of tasks in which the reader must answer questions about stories by reading entire books or movie scripts. These tasks are designed so that successfully answering their questions requires understanding the underlying narrative rather than relying on shallow pattern matching or salience. We show that although humans solve the tasks easily, standard RC models struggle on the tasks presented here. We provide an analysis of the dataset and the challenges it presents.
Understanding Grounded Language Learning Agents
Oct 26, 2017


Neural network-based systems can now learn to locate the referents of words and phrases in images, answer questions about visual scenes, and even execute symbolic instructions as first-person actors in partially-observable worlds. To achieve this so-called grounded language learning, models must overcome certain well-studied learning challenges that are also fundamental to infants learning their first words. While it is notable that models with no meaningful prior knowledge overcome these learning obstacles, AI researchers and practitioners currently lack a clear understanding of exactly how they do so. Here we address this question as a way of achieving a clearer general understanding of grounded language learning, both to inform future research and to improve confidence in model predictions. For maximum control and generality, we focus on a simple neural network-based language learning agent trained via policy-gradient methods to interpret synthetic linguistic instructions in a simulated 3D world. We apply experimental paradigms from developmental psychology to this agent, exploring the conditions under which established human biases and learning effects emerge. We further propose a novel way to visualise and analyse semantic representation in grounded language learning agents that yields a plausible computational account of the observed effects.
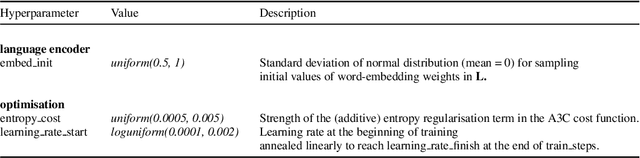
Grounded Language Learning in a Simulated 3D World
Jun 26, 2017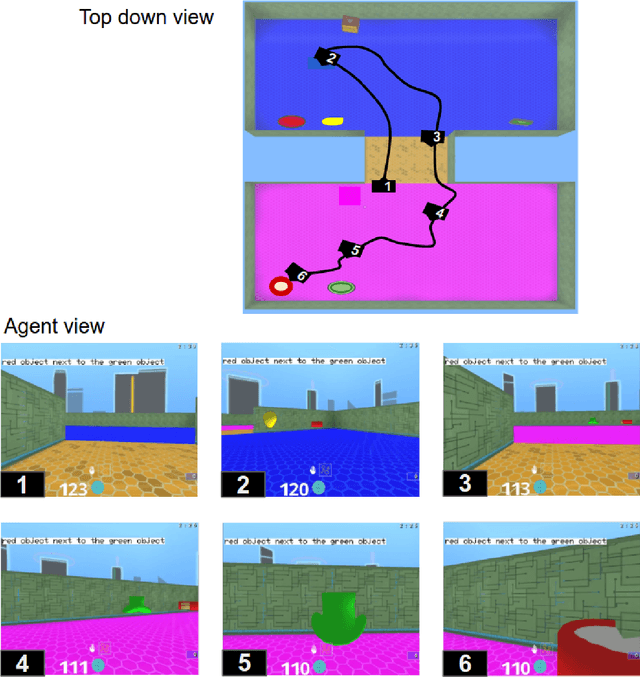
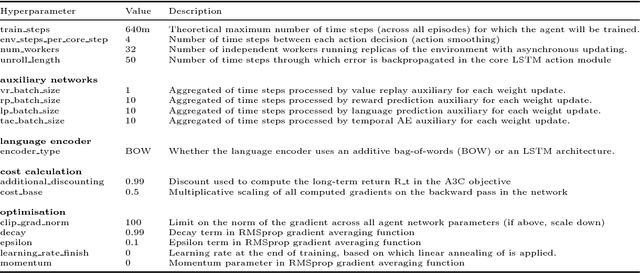
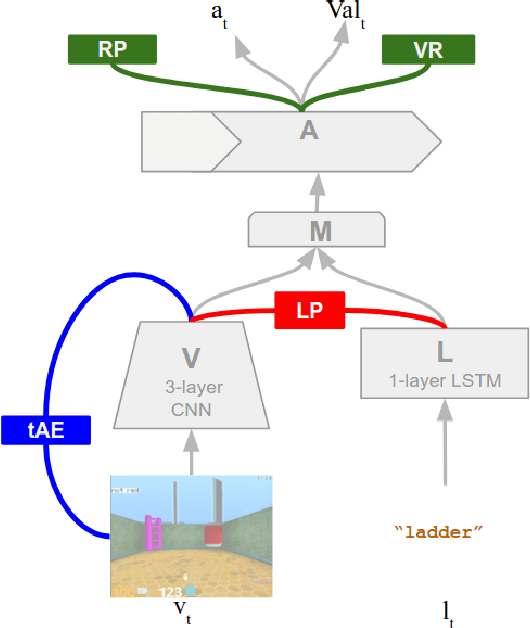
We are increasingly surrounded by artificially intelligent technology that takes decisions and executes actions on our behalf. This creates a pressing need for general means to communicate with, instruct and guide artificial agents, with human language the most compelling means for such communication. To achieve this in a scalable fashion, agents must be able to relate language to the world and to actions; that is, their understanding of language must be grounded and embodied. However, learning grounded language is a notoriously challenging problem in artificial intelligence research. Here we present an agent that learns to interpret language in a simulated 3D environment where it is rewarded for the successful execution of written instructions. Trained via a combination of reinforcement and unsupervised learning, and beginning with minimal prior knowledge, the agent learns to relate linguistic symbols to emergent perceptual representations of its physical surroundings and to pertinent sequences of actions. The agent's comprehension of language extends beyond its prior experience, enabling it to apply familiar language to unfamiliar situations and to interpret entirely novel instructions. Moreover, the speed with which this agent learns new words increases as its semantic knowledge grows. This facility for generalising and bootstrapping semantic knowledge indicates the potential of the present approach for reconciling ambiguous natural language with the complexity of the physical world.