 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan foundation models actively gather information in interactive environments to test hypotheses?
Dec 09, 2024



While problem solving is a standard evaluation task for foundation models, a crucial component of problem solving -- actively and strategically gathering information to test hypotheses -- has not been closely investigated. To assess the information gathering abilities of foundation models in interactive environments, we introduce a framework in which a model must determine the factors influencing a hidden reward function by iteratively reasoning about its previously gathered information and proposing its next exploratory action to maximize information gain at each step. We implement this framework in both a text-based environment, which offers a tightly controlled setting and enables high-throughput parameter sweeps, and in an embodied 3D environment, which requires addressing complexities of multi-modal interaction more relevant to real-world applications. We further investigate whether approaches such as self-correction and increased inference time improve information gathering efficiency. In a relatively simple task that requires identifying a single rewarding feature, we find that LLM's information gathering capability is close to optimal. However, when the model must identify a conjunction of rewarding features, performance is suboptimal. The hit in performance is due partly to the model translating task description to a policy and partly to the model's effectiveness in using its in-context memory. Performance is comparable in both text and 3D embodied environments, although imperfect visual object recognition reduces its accuracy in drawing conclusions from gathered information in the 3D embodied case. For single-feature-based rewards, we find that smaller models curiously perform better; for conjunction-based rewards, incorporating self correction into the model improves performance.
Hierarchical Reinforcement Learning in Complex 3D Environments
Feb 28, 2023



Hierarchical Reinforcement Learning (HRL) agents have the potential to demonstrate appealing capabilities such as planning and exploration with abstraction, transfer, and skill reuse. Recent successes with HRL across different domains provide evidence that practical, effective HRL agents are possible, even if existing agents do not yet fully realize the potential of HRL. Despite these successes, visually complex partially observable 3D environments remained a challenge for HRL agents. We address this issue with Hierarchical Hybrid Offline-Online (H2O2), a hierarchical deep reinforcement learning agent that discovers and learns to use options from scratch using its own experience. We show that H2O2 is competitive with a strong non-hierarchical Muesli baseline in the DeepMind Hard Eight tasks and we shed new light on the problem of learning hierarchical agents in complex environments. Our empirical study of H2O2 reveals previously unnoticed practical challenges and brings new perspective to the current understanding of hierarchical agents in complex domains.
V-MPO: On-Policy Maximum a Posteriori Policy Optimization for Discrete and Continuous Control
Sep 26, 2019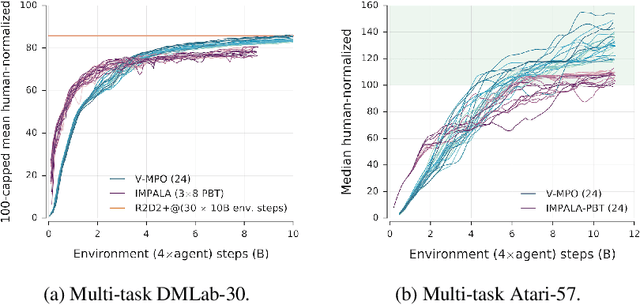
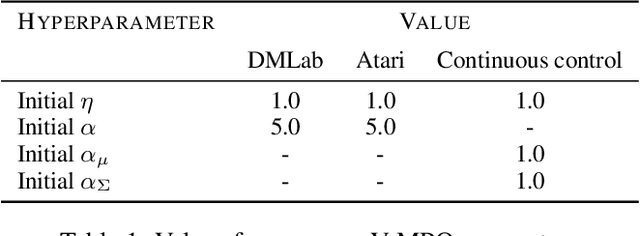
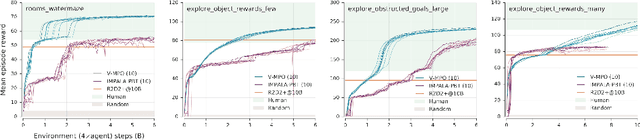
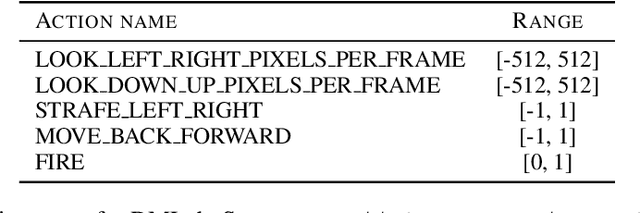
Some of the most successful applications of deep reinforcement learning to challenging domains in discrete and continuous control have used policy gradient methods in the on-policy setting. However, policy gradients can suffer from large variance that may limit performance, and in practice require carefully tuned entropy regularization to prevent policy collapse. As an alternative to policy gradient algorithms, we introduce V-MPO, an on-policy adaptation of Maximum a Posteriori Policy Optimization (MPO) that performs policy iteration based on a learned state-value function. We show that V-MPO surpasses previously reported scores for both the Atari-57 and DMLab-30 benchmark suites in the multi-task setting, and does so reliably without importance weighting, entropy regularization, or population-based tuning of hyperparameters. On individual DMLab and Atari levels, the proposed algorithm can achieve scores that are substantially higher than has previously been reported. V-MPO is also applicable to problems with high-dimensional, continuous action spaces, which we demonstrate in the context of learning to control simulated humanoids with 22 degrees of freedom from full state observations and 56 degrees of freedom from pixel observations, as well as example OpenAI Gym tasks where V-MPO achieves substantially higher asymptotic scores than previously reported.
Making Efficient Use of Demonstrations to Solve Hard Exploration Problems
Sep 03, 2019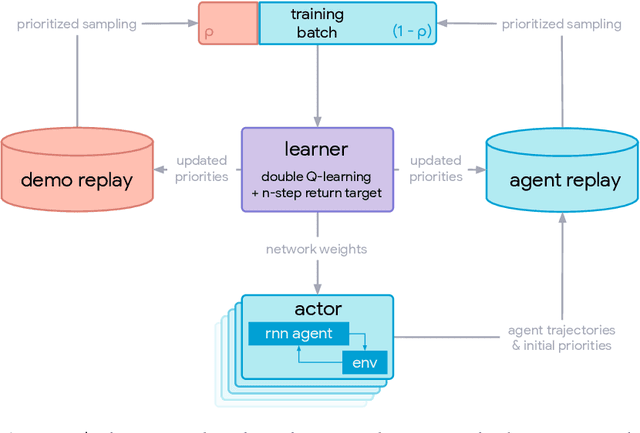
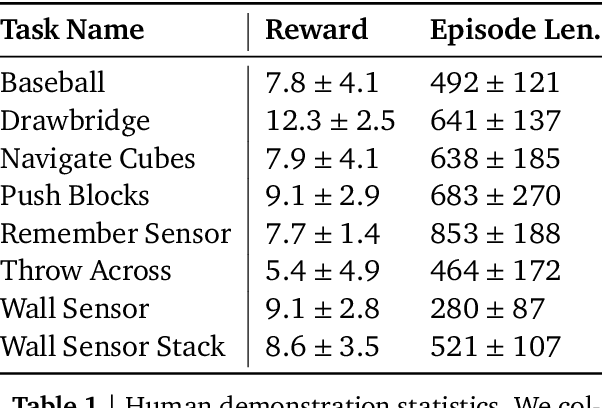
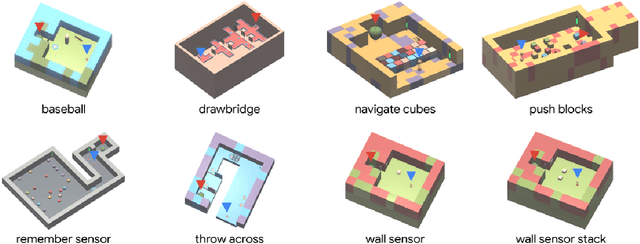
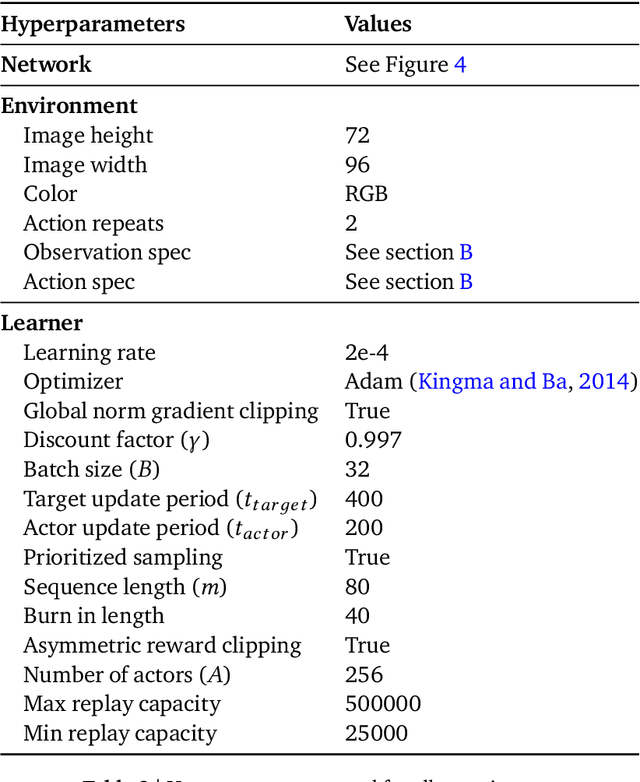
This paper introduces R2D3, an agent that makes efficient use of demonstrations to solve hard exploration problems in partially observable environments with highly variable initial conditions. We also introduce a suite of eight tasks that combine these three properties, and show that R2D3 can solve several of the tasks where other state of the art methods (both with and without demonstrations) fail to see even a single successful trajectory after tens of billions of steps of exploration.
Multi-task Deep Reinforcement Learning with PopArt
Sep 12, 2018
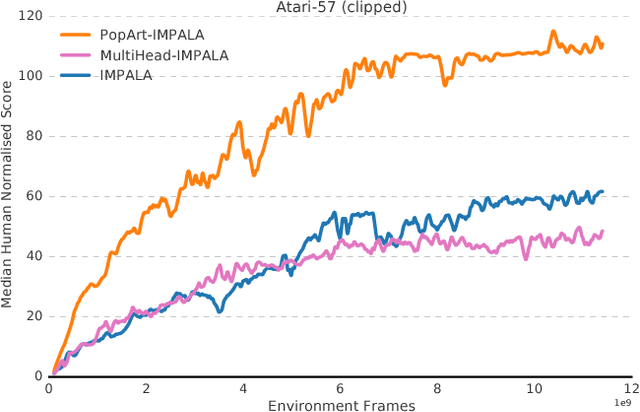
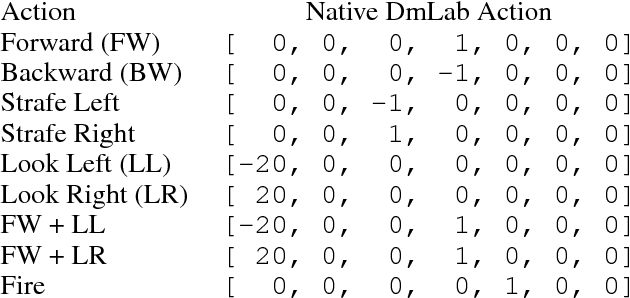
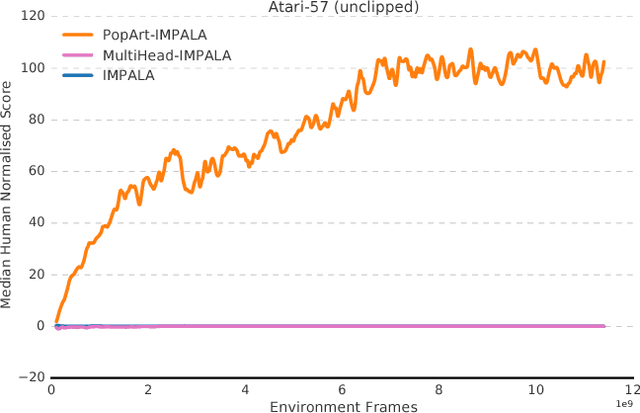
The reinforcement learning community has made great strides in designing algorithms capable of exceeding human performance on specific tasks. These algorithms are mostly trained one task at the time, each new task requiring to train a brand new agent instance. This means the learning algorithm is general, but each solution is not; each agent can only solve the one task it was trained on. In this work, we study the problem of learning to master not one but multiple sequential-decision tasks at once. A general issue in multi-task learning is that a balance must be found between the needs of multiple tasks competing for the limited resources of a single learning system. Many learning algorithms can get distracted by certain tasks in the set of tasks to solve. Such tasks appear more salient to the learning process, for instance because of the density or magnitude of the in-task rewards. This causes the algorithm to focus on those salient tasks at the expense of generality. We propose to automatically adapt the contribution of each task to the agent's updates, so that all tasks have a similar impact on the learning dynamics. This resulted in state of the art performance on learning to play all games in a set of 57 diverse Atari games. Excitingly, our method learned a single trained policy - with a single set of weights - that exceeds median human performance. To our knowledge, this was the first time a single agent surpassed human-level performance on this multi-task domain. The same approach also demonstrated state of the art performance on a set of 30 tasks in the 3D reinforcement learning platform DeepMind Lab.
IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures
Jun 28, 2018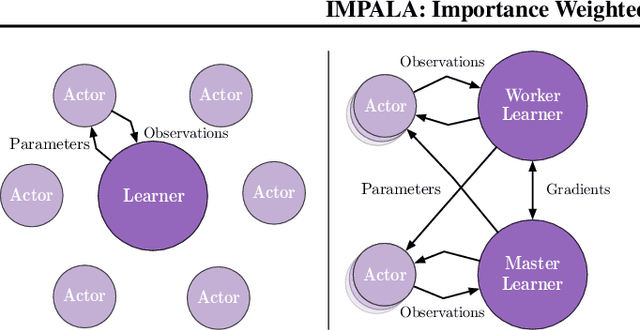
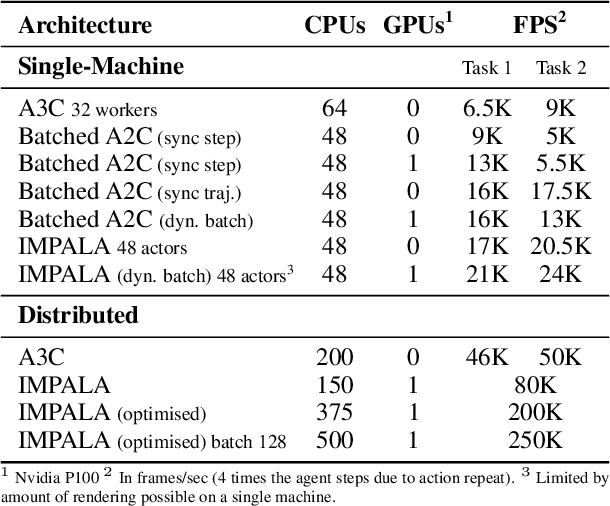
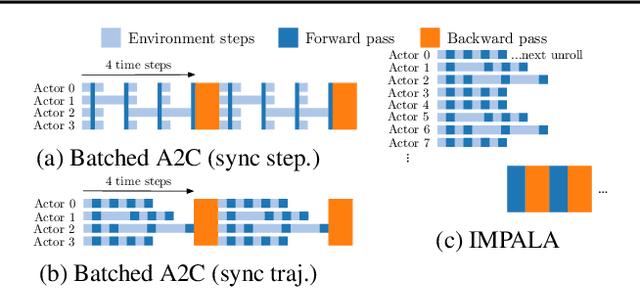
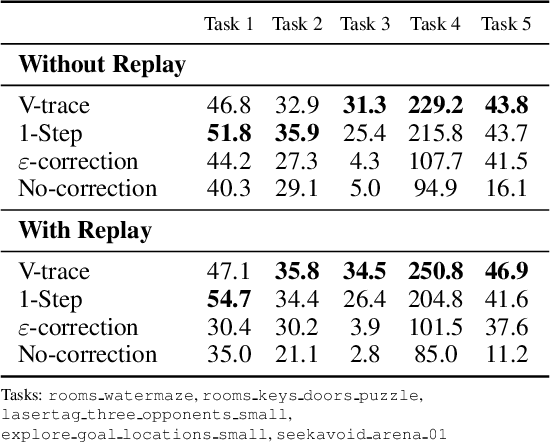
In this work we aim to solve a large collection of tasks using a single reinforcement learning agent with a single set of parameters. A key challenge is to handle the increased amount of data and extended training time. We have developed a new distributed agent IMPALA (Importance Weighted Actor-Learner Architecture) that not only uses resources more efficiently in single-machine training but also scales to thousands of machines without sacrificing data efficiency or resource utilisation. We achieve stable learning at high throughput by combining decoupled acting and learning with a novel off-policy correction method called V-trace. We demonstrate the effectiveness of IMPALA for multi-task reinforcement learning on DMLab-30 (a set of 30 tasks from the DeepMind Lab environment (Beattie et al., 2016)) and Atari-57 (all available Atari games in Arcade Learning Environment (Bellemare et al., 2013a)). Our results show that IMPALA is able to achieve better performance than previous agents with less data, and crucially exhibits positive transfer between tasks as a result of its multi-task approach.
Low-pass Recurrent Neural Networks - A memory architecture for longer-term correlation discovery
May 13, 2018
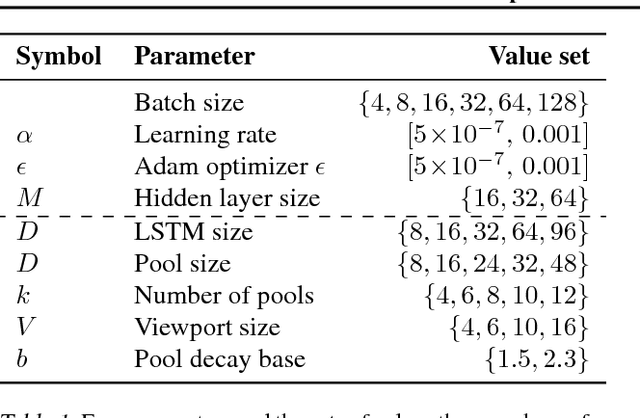
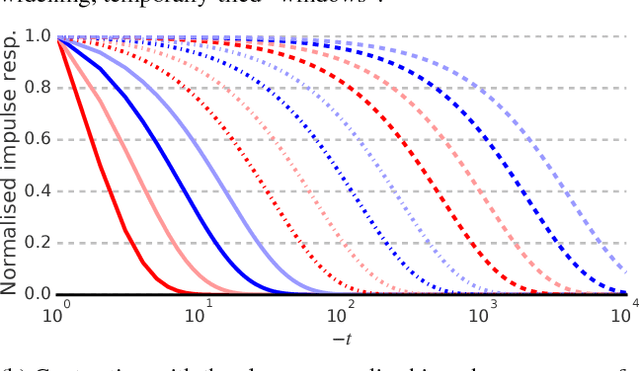
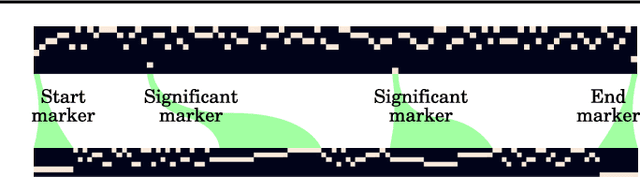
Reinforcement learning (RL) agents performing complex tasks must be able to remember observations and actions across sizable time intervals. This is especially true during the initial learning stages, when exploratory behaviour can increase the delay between specific actions and their effects. Many new or popular approaches for learning these distant correlations employ backpropagation through time (BPTT), but this technique requires storing observation traces long enough to span the interval between cause and effect. Besides memory demands, learning dynamics like vanishing gradients and slow convergence due to infrequent weight updates can reduce BPTT's practicality; meanwhile, although online recurrent network learning is a developing topic, most approaches are not efficient enough to use as replacements. We propose a simple, effective memory strategy that can extend the window over which BPTT can learn without requiring longer traces. We explore this approach empirically on a few tasks and discuss its implications.
Grounded Language Learning in a Simulated 3D World
Jun 26, 2017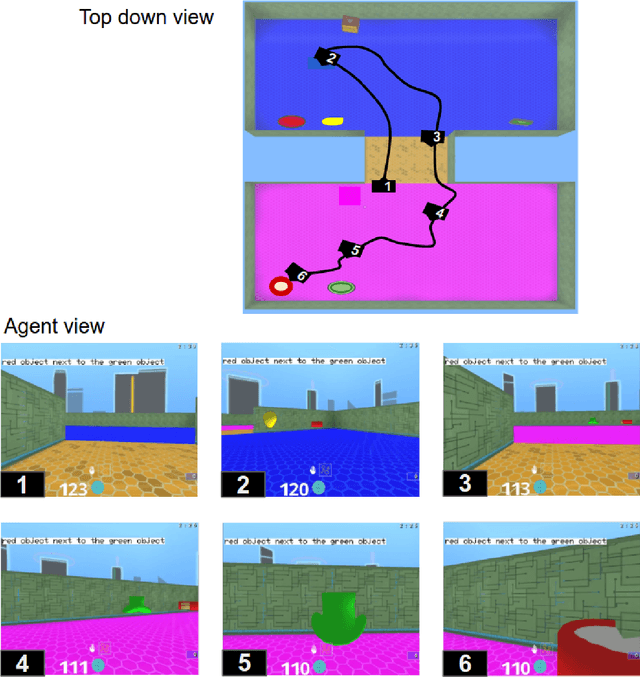
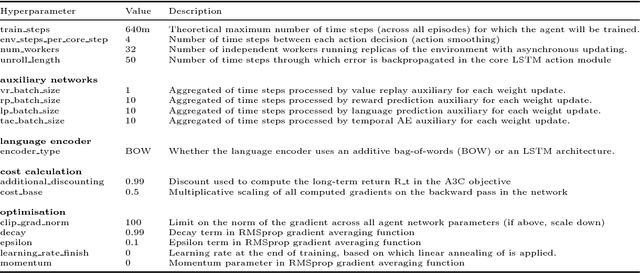
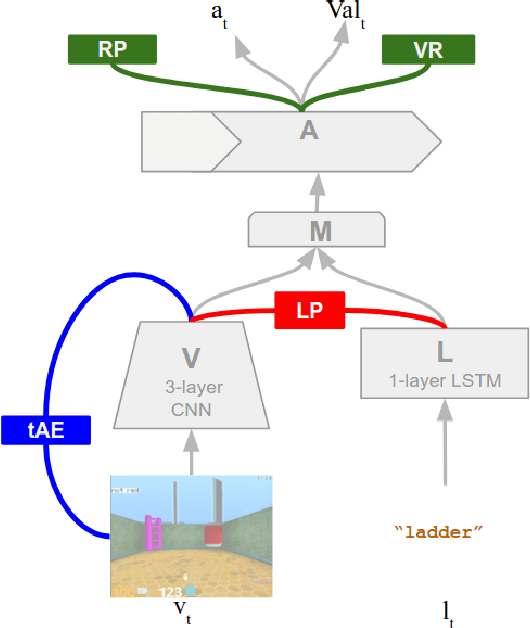
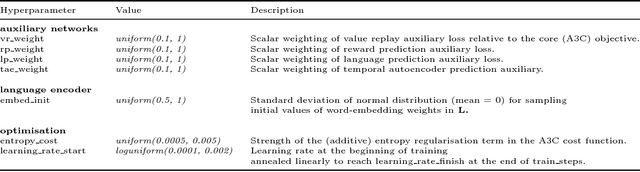
We are increasingly surrounded by artificially intelligent technology that takes decisions and executes actions on our behalf. This creates a pressing need for general means to communicate with, instruct and guide artificial agents, with human language the most compelling means for such communication. To achieve this in a scalable fashion, agents must be able to relate language to the world and to actions; that is, their understanding of language must be grounded and embodied. However, learning grounded language is a notoriously challenging problem in artificial intelligence research. Here we present an agent that learns to interpret language in a simulated 3D environment where it is rewarded for the successful execution of written instructions. Trained via a combination of reinforcement and unsupervised learning, and beginning with minimal prior knowledge, the agent learns to relate linguistic symbols to emergent perceptual representations of its physical surroundings and to pertinent sequences of actions. The agent's comprehension of language extends beyond its prior experience, enabling it to apply familiar language to unfamiliar situations and to interpret entirely novel instructions. Moreover, the speed with which this agent learns new words increases as its semantic knowledge grows. This facility for generalising and bootstrapping semantic knowledge indicates the potential of the present approach for reconciling ambiguous natural language with the complexity of the physical world.
Learning to reinforcement learn
Jan 23, 2017
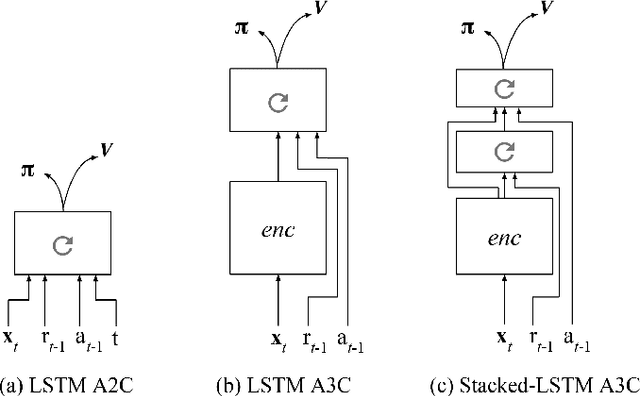
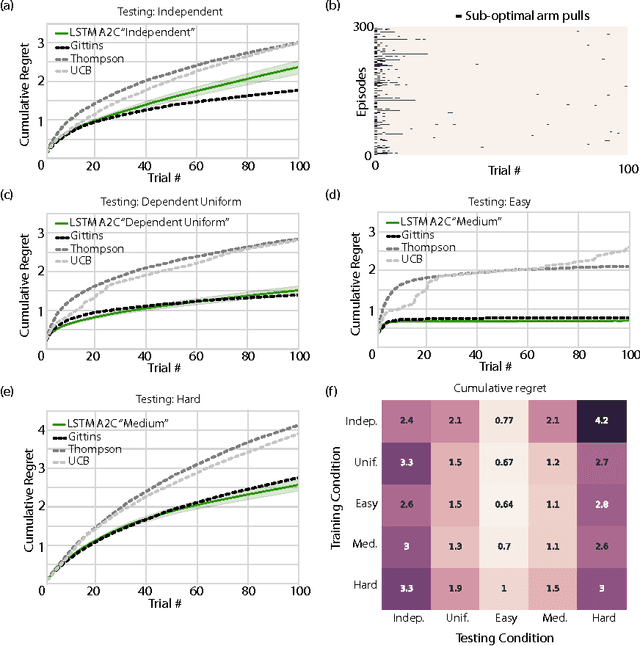
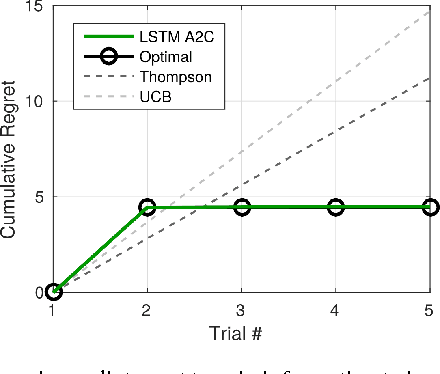
In recent years deep reinforcement learning (RL) systems have attained superhuman performance in a number of challenging task domains. However, a major limitation of such applications is their demand for massive amounts of training data. A critical present objective is thus to develop deep RL methods that can adapt rapidly to new tasks. In the present work we introduce a novel approach to this challenge, which we refer to as deep meta-reinforcement learning. Previous work has shown that recurrent networks can support meta-learning in a fully supervised context. We extend this approach to the RL setting. What emerges is a system that is trained using one RL algorithm, but whose recurrent dynamics implement a second, quite separate RL procedure. This second, learned RL algorithm can differ from the original one in arbitrary ways. Importantly, because it is learned, it is configured to exploit structure in the training domain. We unpack these points in a series of seven proof-of-concept experiments, each of which examines a key aspect of deep meta-RL. We consider prospects for extending and scaling up the approach, and also point out some potentially important implications for neuroscience.
Learning to Navigate in Complex Environments
Jan 13, 2017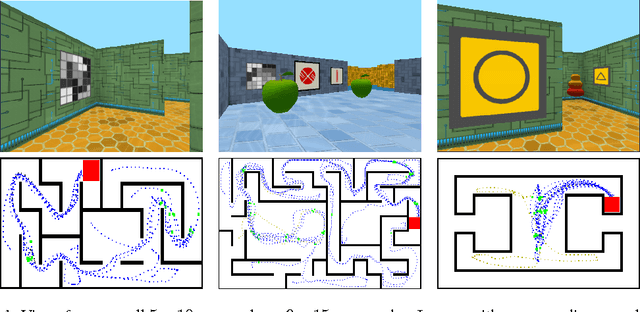
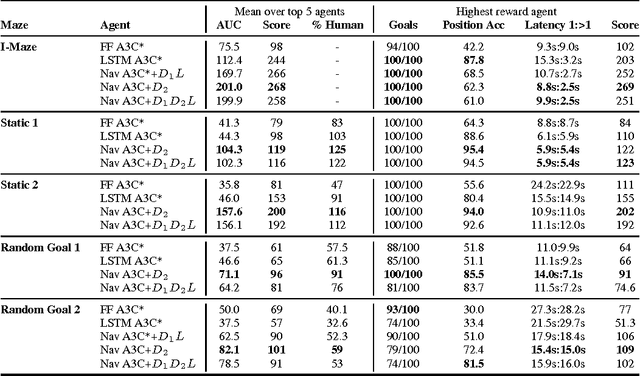
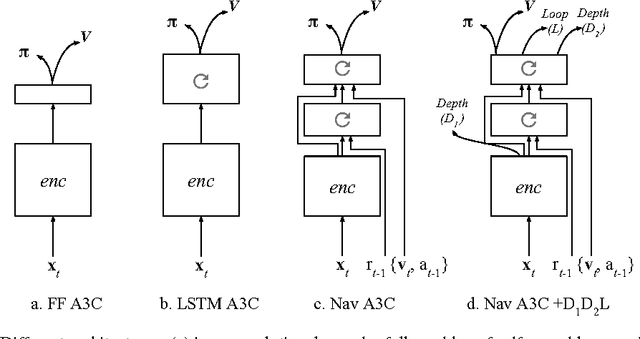
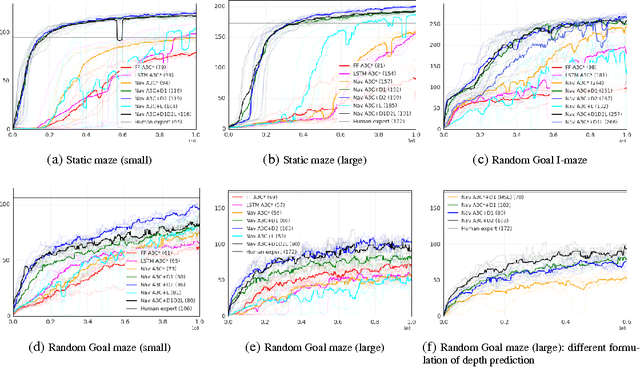
Learning to navigate in complex environments with dynamic elements is an important milestone in developing AI agents. In this work we formulate the navigation question as a reinforcement learning problem and show that data efficiency and task performance can be dramatically improved by relying on additional auxiliary tasks leveraging multimodal sensory inputs. In particular we consider jointly learning the goal-driven reinforcement learning problem with auxiliary depth prediction and loop closure classification tasks. This approach can learn to navigate from raw sensory input in complicated 3D mazes, approaching human-level performance even under conditions where the goal location changes frequently. We provide detailed analysis of the agent behaviour, its ability to localise, and its network activity dynamics, showing that the agent implicitly learns key navigation abilities.