 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgedm_control: Software and Tasks for Continuous Control
Jun 22, 2020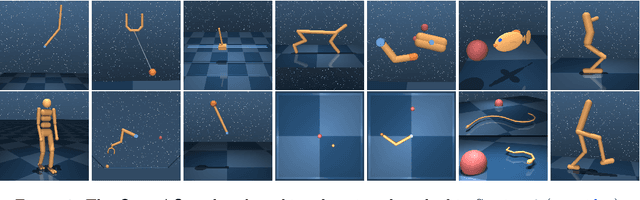
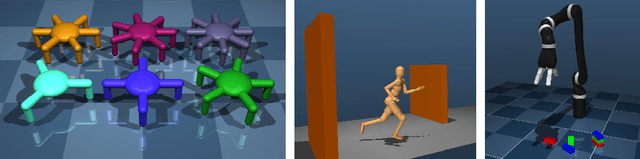
The dm_control software package is a collection of Python libraries and task suites for reinforcement learning agents in an articulated-body simulation. A MuJoCo wrapper provides convenient bindings to functions and data structures. The PyMJCF and Composer libraries enable procedural model manipulation and task authoring. The Control Suite is a fixed set of tasks with standardised structure, intended to serve as performance benchmarks. The Locomotion framework provides high-level abstractions and examples of locomotion tasks. A set of configurable manipulation tasks with a robot arm and snap-together bricks is also included. dm_control is publicly available at https://www.github.com/deepmind/dm_control
Transformation-based Adversarial Video Prediction on Large-Scale Data
Mar 09, 2020
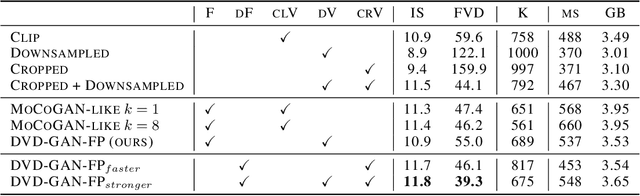
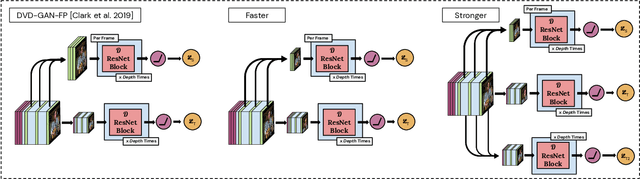
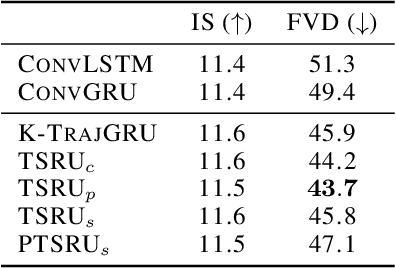
Recent breakthroughs in adversarial generative modeling have led to models capable of producing video samples of high quality, even on large and complex datasets of real-world video. In this work, we focus on the task of video prediction, where given a sequence of frames extracted from a video, the goal is to generate a plausible future sequence. We first improve the state of the art by performing a systematic empirical study of discriminator decompositions and proposing an architecture that yields faster convergence and higher performance than previous approaches. We then analyze recurrent units in the generator, and propose a novel recurrent unit which transforms its past hidden state according to predicted motion-like features, and refines it to to handle dis-occlusions, scene changes and other complex behavior. We show that this recurrent unit consistently outperforms previous designs. Our final model leads to a leap in the state-of-the-art performance, obtaining a test set Frechet Video Distance of 25.7, down from 69.2, on the large-scale Kinetics-600 dataset.
Behaviour Suite for Reinforcement Learning
Aug 13, 2019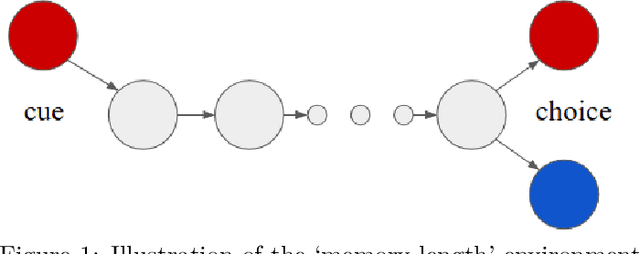
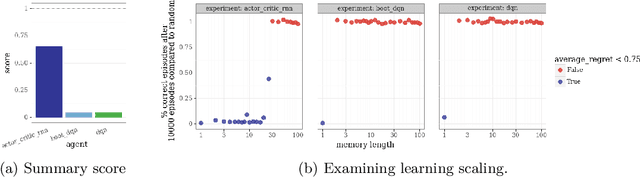
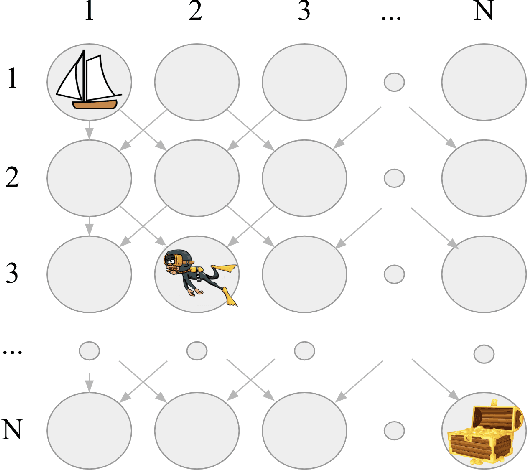
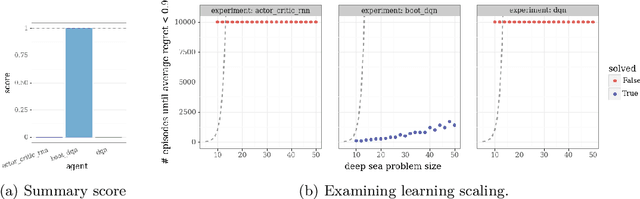
This paper introduces the Behaviour Suite for Reinforcement Learning, or bsuite for short. bsuite is a collection of carefully-designed experiments that investigate core capabilities of reinforcement learning (RL) agents with two objectives. First, to collect clear, informative and scalable problems that capture key issues in the design of general and efficient learning algorithms. Second, to study agent behaviour through their performance on these shared benchmarks. To complement this effort, we open source github.com/deepmind/bsuite, which automates evaluation and analysis of any agent on bsuite. This library facilitates reproducible and accessible research on the core issues in RL, and ultimately the design of superior learning algorithms. Our code is Python, and easy to use within existing projects. We include examples with OpenAI Baselines, Dopamine as well as new reference implementations. Going forward, we hope to incorporate more excellent experiments from the research community, and commit to a periodic review of bsuite from a committee of prominent researchers.
Deep Reinforcement Learning and the Deadly Triad
Dec 06, 2018
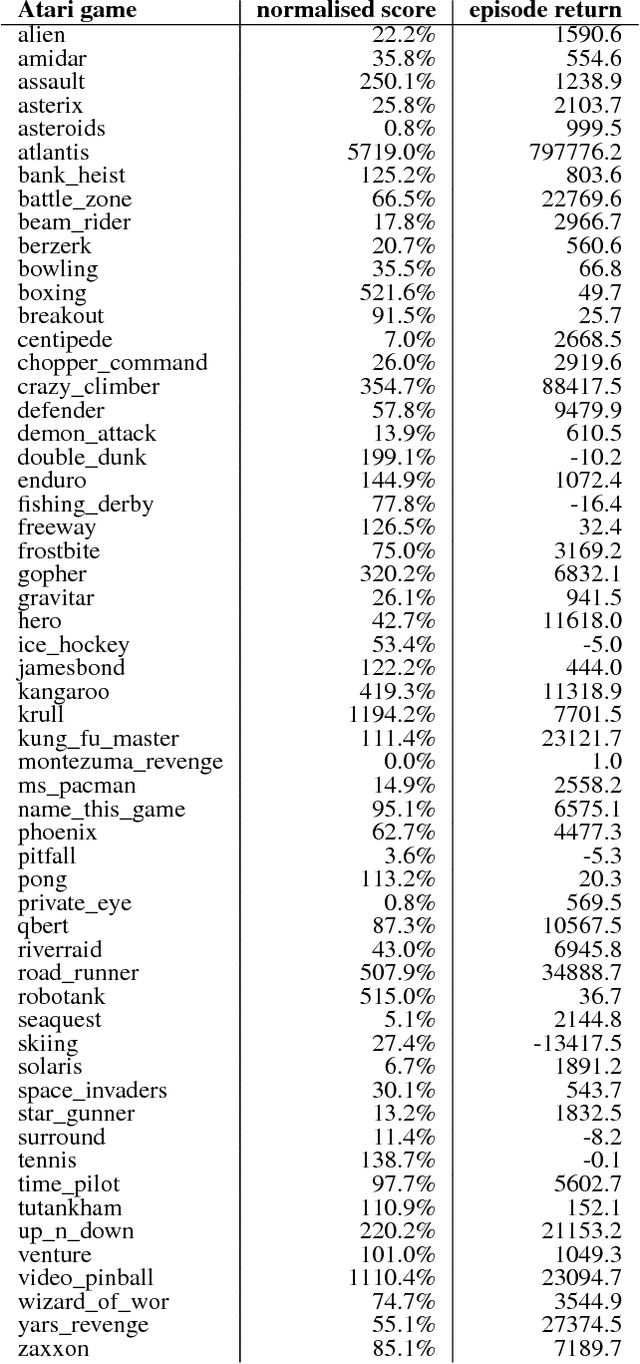
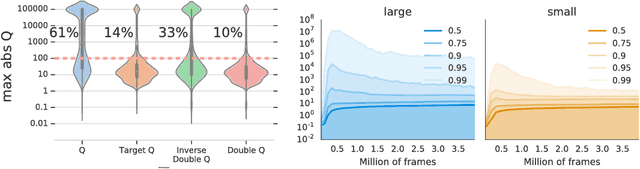
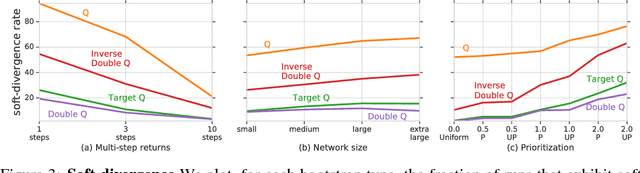
We know from reinforcement learning theory that temporal difference learning can fail in certain cases. Sutton and Barto (2018) identify a deadly triad of function approximation, bootstrapping, and off-policy learning. When these three properties are combined, learning can diverge with the value estimates becoming unbounded. However, several algorithms successfully combine these three properties, which indicates that there is at least a partial gap in our understanding. In this work, we investigate the impact of the deadly triad in practice, in the context of a family of popular deep reinforcement learning models - deep Q-networks trained with experience replay - analysing how the components of this system play a role in the emergence of the deadly triad, and in the agent's performance
IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures
Jun 28, 2018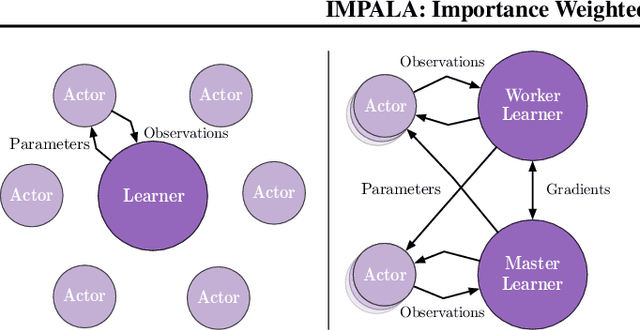
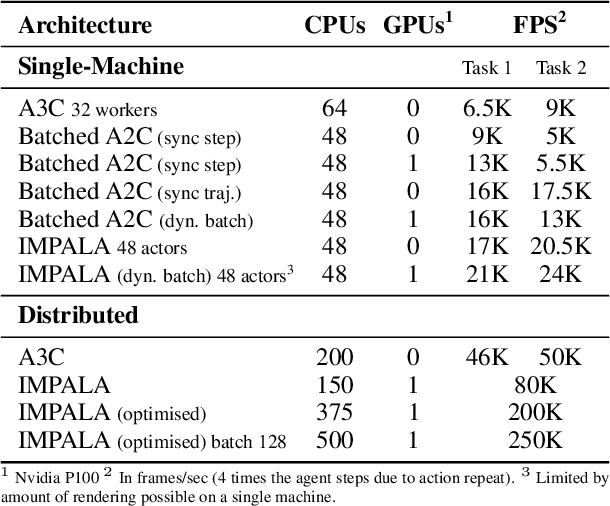
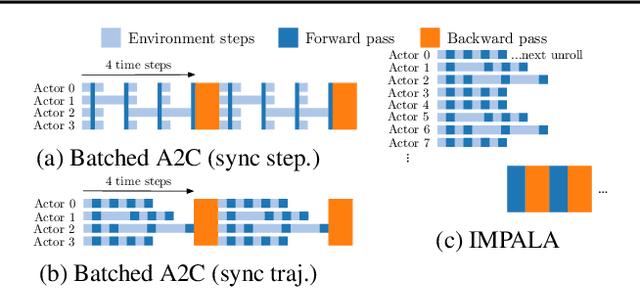
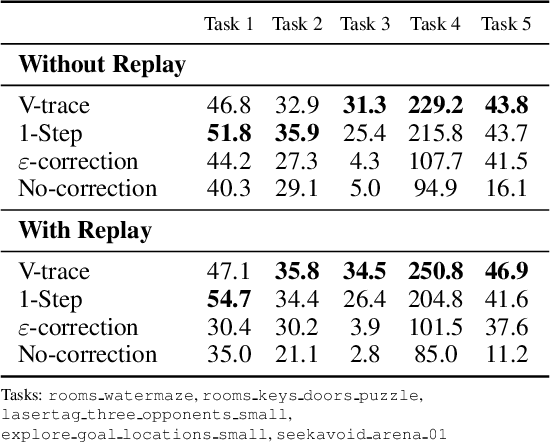
In this work we aim to solve a large collection of tasks using a single reinforcement learning agent with a single set of parameters. A key challenge is to handle the increased amount of data and extended training time. We have developed a new distributed agent IMPALA (Importance Weighted Actor-Learner Architecture) that not only uses resources more efficiently in single-machine training but also scales to thousands of machines without sacrificing data efficiency or resource utilisation. We achieve stable learning at high throughput by combining decoupled acting and learning with a novel off-policy correction method called V-trace. We demonstrate the effectiveness of IMPALA for multi-task reinforcement learning on DMLab-30 (a set of 30 tasks from the DeepMind Lab environment (Beattie et al., 2016)) and Atari-57 (all available Atari games in Arcade Learning Environment (Bellemare et al., 2013a)). Our results show that IMPALA is able to achieve better performance than previous agents with less data, and crucially exhibits positive transfer between tasks as a result of its multi-task approach.
DeepMind Control Suite
Jan 02, 2018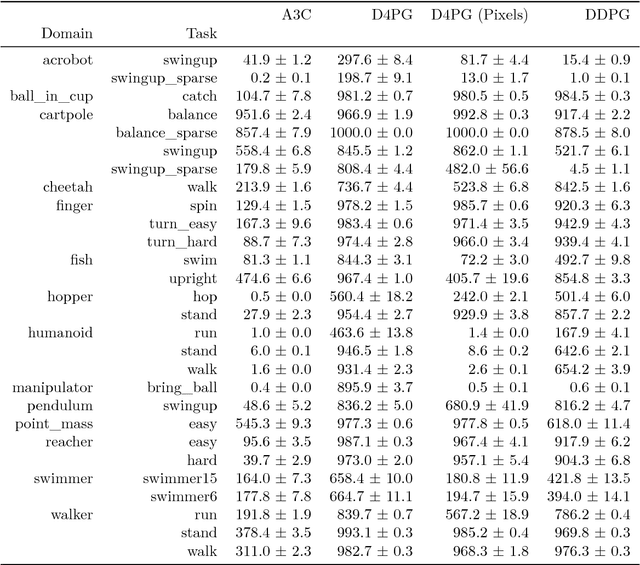
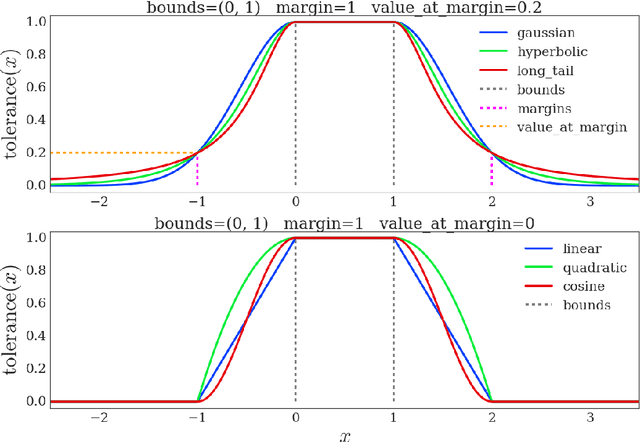
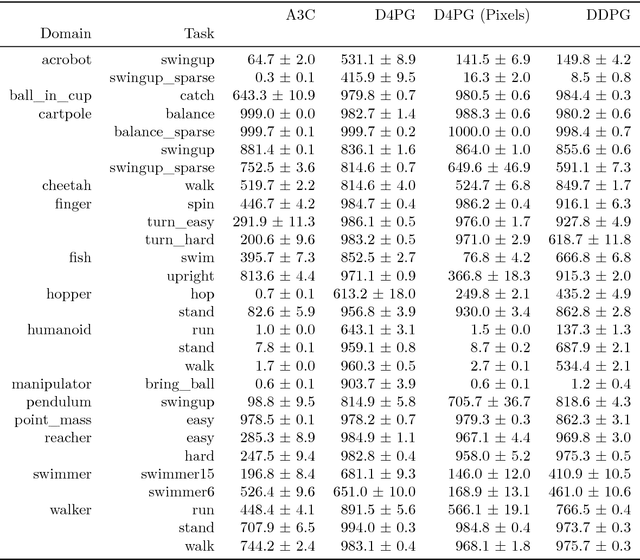
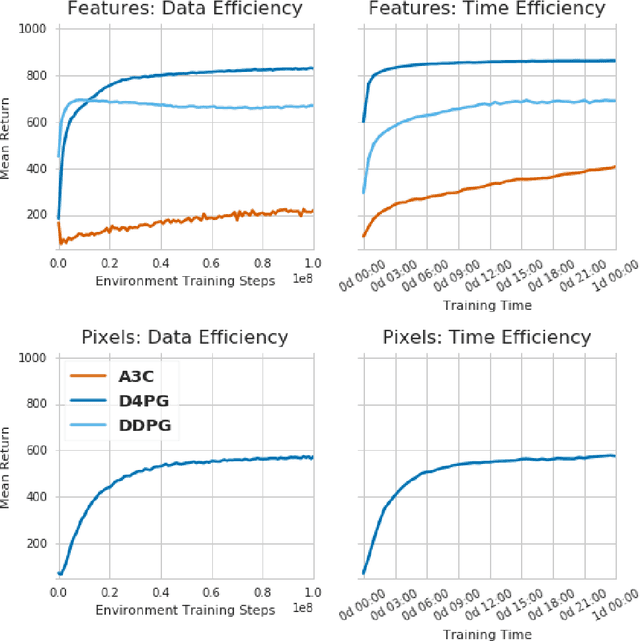
The DeepMind Control Suite is a set of continuous control tasks with a standardised structure and interpretable rewards, intended to serve as performance benchmarks for reinforcement learning agents. The tasks are written in Python and powered by the MuJoCo physics engine, making them easy to use and modify. We include benchmarks for several learning algorithms. The Control Suite is publicly available at https://www.github.com/deepmind/dm_control . A video summary of all tasks is available at http://youtu.be/rAai4QzcYbs .