 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCreating Multimodal Interactive Agents with Imitation and Self-Supervised Learning
Dec 07, 2021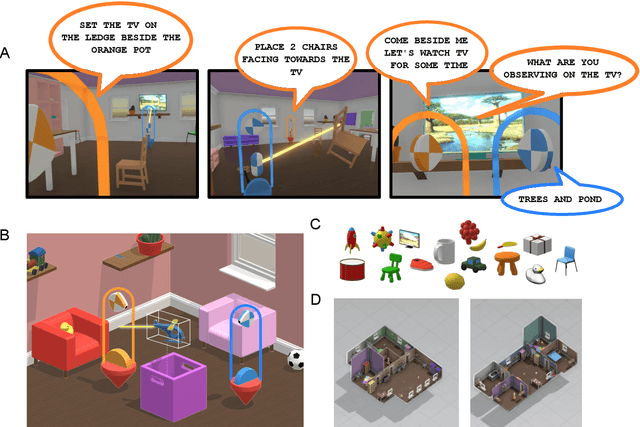
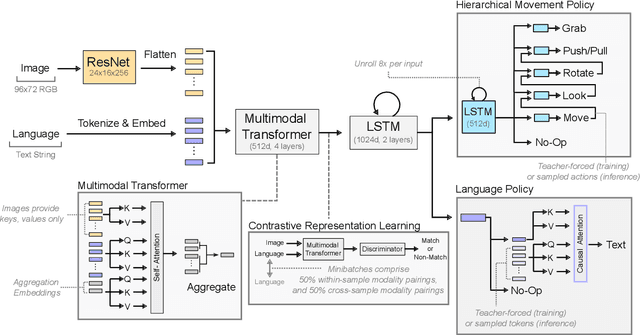
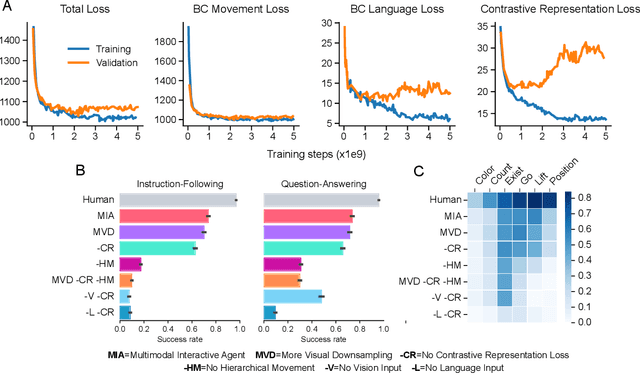
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. We show that imitation learning of human-human interactions in a simulated world, in conjunction with self-supervised learning, is sufficient to produce a multimodal interactive agent, which we call MIA, that successfully interacts with non-adversarial humans 75% of the time. We further identify architectural and algorithmic techniques that improve performance, such as hierarchical action selection. Altogether, our results demonstrate that imitation of multi-modal, real-time human behaviour may provide a straightforward and surprisingly effective means of imbuing agents with a rich behavioural prior from which agents might then be fine-tuned for specific purposes, thus laying a foundation for training capable agents for interactive robots or digital assistants. A video of MIA's behaviour may be found at https://youtu.be/ZFgRhviF7mY
Imitating Interactive Intelligence
Jan 21, 2021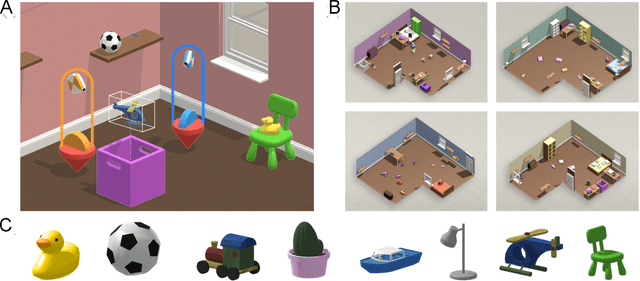
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. This setting nevertheless integrates a number of the central challenges of artificial intelligence (AI) research: complex visual perception and goal-directed physical control, grounded language comprehension and production, and multi-agent social interaction. To build agents that can robustly interact with humans, we would ideally train them while they interact with humans. However, this is presently impractical. Therefore, we approximate the role of the human with another learned agent, and use ideas from inverse reinforcement learning to reduce the disparities between human-human and agent-agent interactive behaviour. Rigorously evaluating our agents poses a great challenge, so we develop a variety of behavioural tests, including evaluation by humans who watch videos of agents or interact directly with them. These evaluations convincingly demonstrate that interactive training and auxiliary losses improve agent behaviour beyond what is achieved by supervised learning of actions alone. Further, we demonstrate that agent capabilities generalise beyond literal experiences in the dataset. Finally, we train evaluation models whose ratings of agents agree well with human judgement, thus permitting the evaluation of new agent models without additional effort. Taken together, our results in this virtual environment provide evidence that large-scale human behavioural imitation is a promising tool to create intelligent, interactive agents, and the challenge of reliably evaluating such agents is possible to surmount.
Human Instruction-Following with Deep Reinforcement Learning via Transfer-Learning from Text
May 19, 2020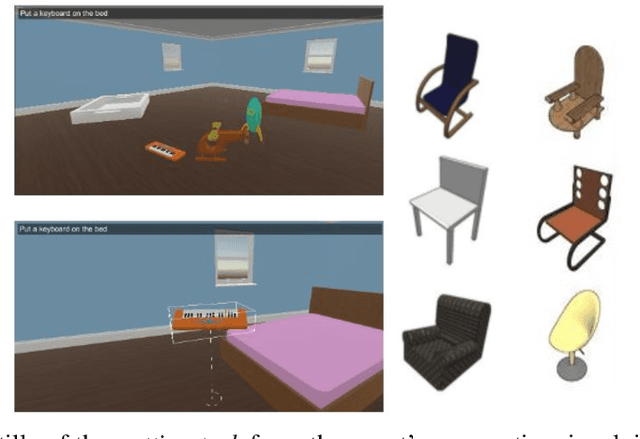
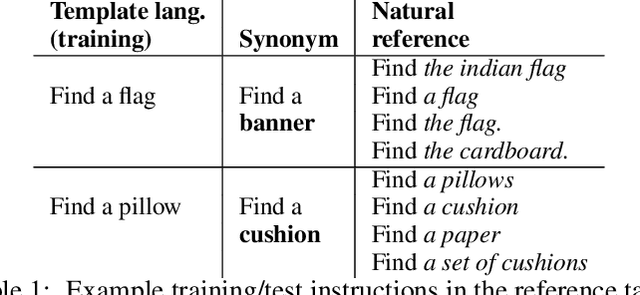
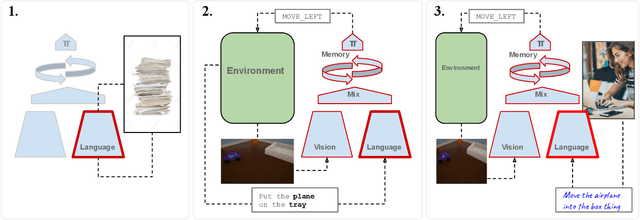

Recent work has described neural-network-based agents that are trained with reinforcement learning (RL) to execute language-like commands in simulated worlds, as a step towards an intelligent agent or robot that can be instructed by human users. However, the optimisation of multi-goal motor policies via deep RL from scratch requires many episodes of experience. Consequently, instruction-following with deep RL typically involves language generated from templates (by an environment simulator), which does not reflect the varied or ambiguous expressions of real users. Here, we propose a conceptually simple method for training instruction-following agents with deep RL that are robust to natural human instructions. By applying our method with a state-of-the-art pre-trained text-based language model (BERT), on tasks requiring agents to identify and position everyday objects relative to other objects in a naturalistic 3D simulated room, we demonstrate substantially-above-chance zero-shot transfer from synthetic template commands to natural instructions given by humans. Our approach is a general recipe for training any deep RL-based system to interface with human users, and bridges the gap between two research directions of notable recent success: agent-centric motor behavior and text-based representation learning.
A Generalized Framework for Population Based Training
Feb 05, 2019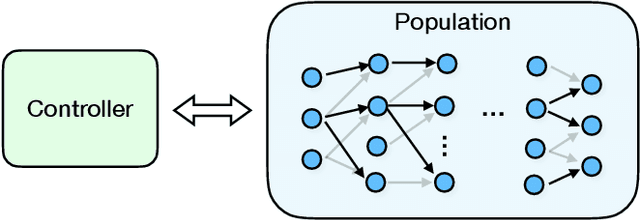
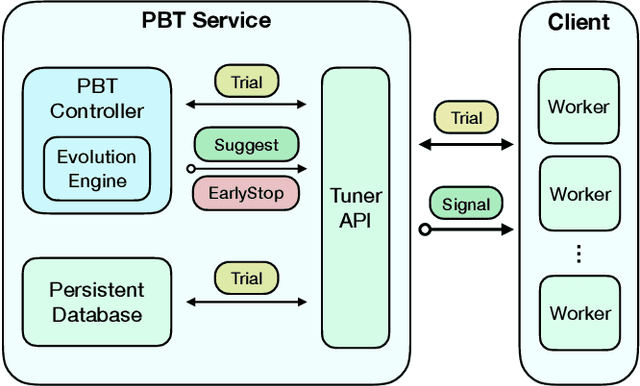


Population Based Training (PBT) is a recent approach that jointly optimizes neural network weights and hyperparameters which periodically copies weights of the best performers and mutates hyperparameters during training. Previous PBT implementations have been synchronized glass-box systems. We propose a general, black-box PBT framework that distributes many asynchronous "trials" (a small number of training steps with warm-starting) across a cluster, coordinated by the PBT controller. The black-box design does not make assumptions on model architectures, loss functions or training procedures. Our system supports dynamic hyperparameter schedules to optimize both differentiable and non-differentiable metrics. We apply our system to train a state-of-the-art WaveNet generative model for human voice synthesis. We show that our PBT system achieves better accuracy, less sensitivity and faster convergence compared to existing methods, given the same computational resource.
IMPALA: Scalable Distributed Deep-RL with Importance Weighted Actor-Learner Architectures
Jun 28, 2018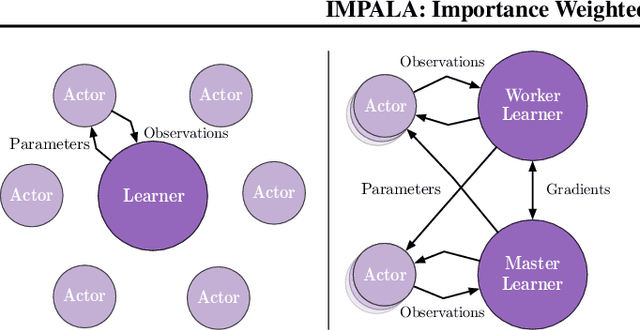
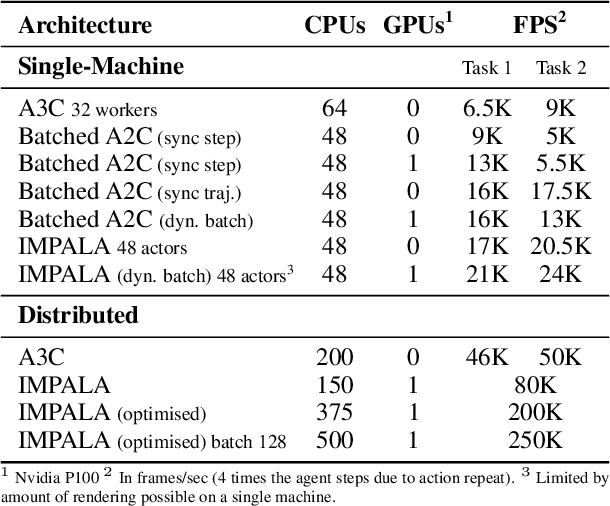
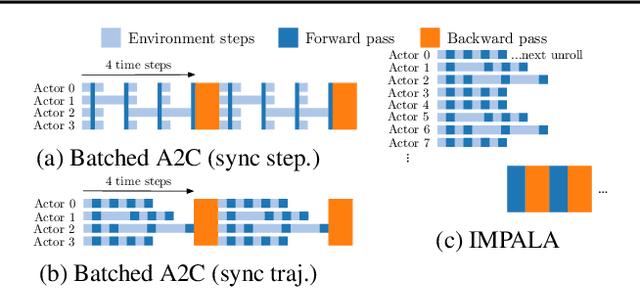
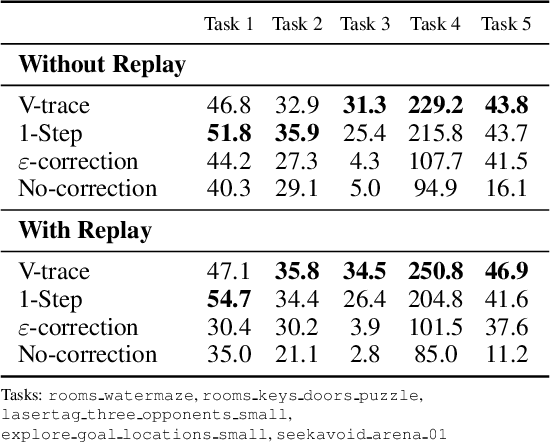
In this work we aim to solve a large collection of tasks using a single reinforcement learning agent with a single set of parameters. A key challenge is to handle the increased amount of data and extended training time. We have developed a new distributed agent IMPALA (Importance Weighted Actor-Learner Architecture) that not only uses resources more efficiently in single-machine training but also scales to thousands of machines without sacrificing data efficiency or resource utilisation. We achieve stable learning at high throughput by combining decoupled acting and learning with a novel off-policy correction method called V-trace. We demonstrate the effectiveness of IMPALA for multi-task reinforcement learning on DMLab-30 (a set of 30 tasks from the DeepMind Lab environment (Beattie et al., 2016)) and Atari-57 (all available Atari games in Arcade Learning Environment (Bellemare et al., 2013a)). Our results show that IMPALA is able to achieve better performance than previous agents with less data, and crucially exhibits positive transfer between tasks as a result of its multi-task approach.
Dynamic Control Flow in Large-Scale Machine Learning
May 04, 2018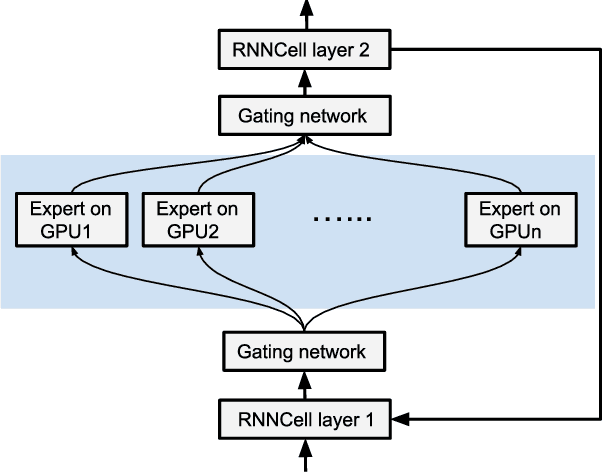
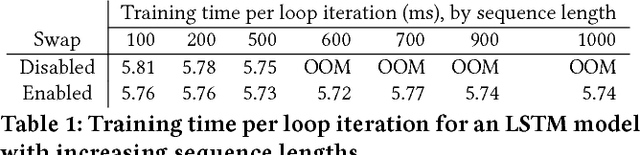
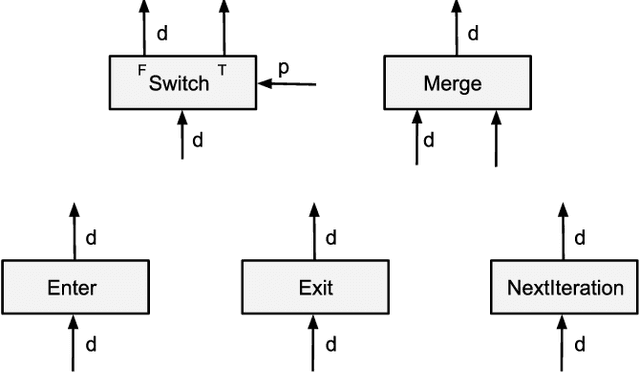
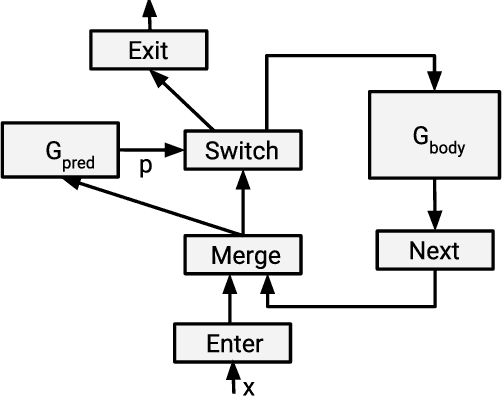
Many recent machine learning models rely on fine-grained dynamic control flow for training and inference. In particular, models based on recurrent neural networks and on reinforcement learning depend on recurrence relations, data-dependent conditional execution, and other features that call for dynamic control flow. These applications benefit from the ability to make rapid control-flow decisions across a set of computing devices in a distributed system. For performance, scalability, and expressiveness, a machine learning system must support dynamic control flow in distributed and heterogeneous environments. This paper presents a programming model for distributed machine learning that supports dynamic control flow. We describe the design of the programming model, and its implementation in TensorFlow, a distributed machine learning system. Our approach extends the use of dataflow graphs to represent machine learning models, offering several distinctive features. First, the branches of conditionals and bodies of loops can be partitioned across many machines to run on a set of heterogeneous devices, including CPUs, GPUs, and custom ASICs. Second, programs written in our model support automatic differentiation and distributed gradient computations, which are necessary for training machine learning models that use control flow. Third, our choice of non-strict semantics enables multiple loop iterations to execute in parallel across machines, and to overlap compute and I/O operations. We have done our work in the context of TensorFlow, and it has been used extensively in research and production. We evaluate it using several real-world applications, and demonstrate its performance and scalability.
* Appeared in EuroSys 2018. 14 pages, 16 figures
Unsupervised Predictive Memory in a Goal-Directed Agent
Mar 28, 2018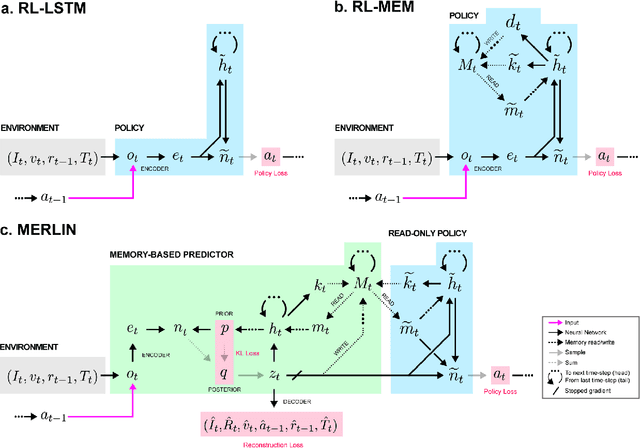
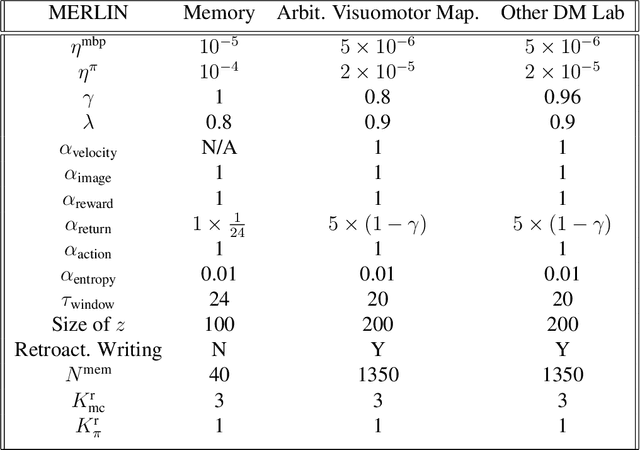
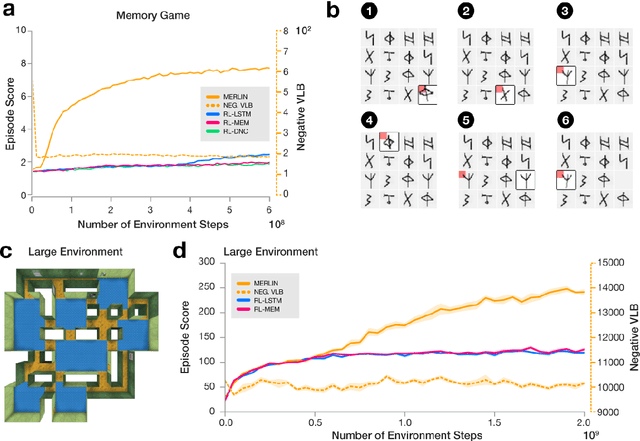
Animals execute goal-directed behaviours despite the limited range and scope of their sensors. To cope, they explore environments and store memories maintaining estimates of important information that is not presently available. Recently, progress has been made with artificial intelligence (AI) agents that learn to perform tasks from sensory input, even at a human level, by merging reinforcement learning (RL) algorithms with deep neural networks, and the excitement surrounding these results has led to the pursuit of related ideas as explanations of non-human animal learning. However, we demonstrate that contemporary RL algorithms struggle to solve simple tasks when enough information is concealed from the sensors of the agent, a property called "partial observability". An obvious requirement for handling partially observed tasks is access to extensive memory, but we show memory is not enough; it is critical that the right information be stored in the right format. We develop a model, the Memory, RL, and Inference Network (MERLIN), in which memory formation is guided by a process of predictive modeling. MERLIN facilitates the solution of tasks in 3D virtual reality environments for which partial observability is severe and memories must be maintained over long durations. Our model demonstrates a single learning agent architecture that can solve canonical behavioural tasks in psychology and neurobiology without strong simplifying assumptions about the dimensionality of sensory input or the duration of experiences.
The Predictron: End-To-End Learning and Planning
Jul 20, 2017



One of the key challenges of artificial intelligence is to learn models that are effective in the context of planning. In this document we introduce the predictron architecture. The predictron consists of a fully abstract model, represented by a Markov reward process, that can be rolled forward multiple "imagined" planning steps. Each forward pass of the predictron accumulates internal rewards and values over multiple planning depths. The predictron is trained end-to-end so as to make these accumulated values accurately approximate the true value function. We applied the predictron to procedurally generated random mazes and a simulator for the game of pool. The predictron yielded significantly more accurate predictions than conventional deep neural network architectures.
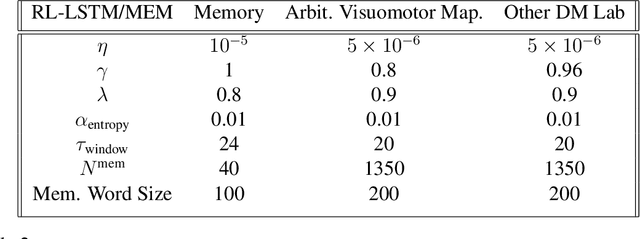
Scaling Memory-Augmented Neural Networks with Sparse Reads and Writes
Oct 27, 2016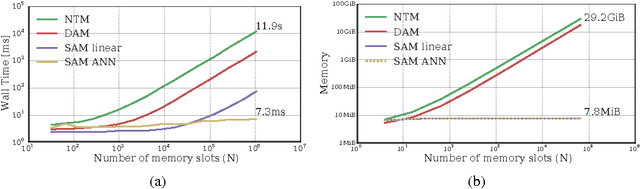
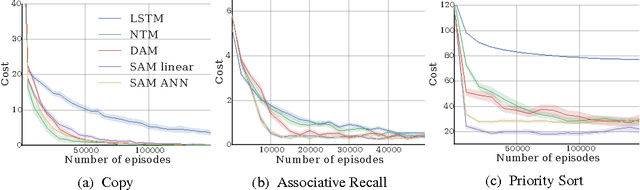
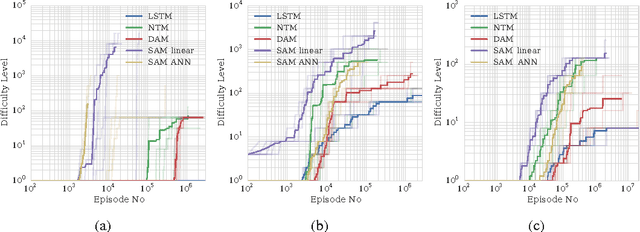
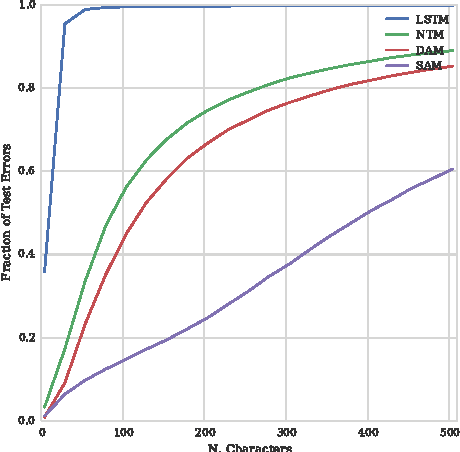
Neural networks augmented with external memory have the ability to learn algorithmic solutions to complex tasks. These models appear promising for applications such as language modeling and machine translation. However, they scale poorly in both space and time as the amount of memory grows --- limiting their applicability to real-world domains. Here, we present an end-to-end differentiable memory access scheme, which we call Sparse Access Memory (SAM), that retains the representational power of the original approaches whilst training efficiently with very large memories. We show that SAM achieves asymptotic lower bounds in space and time complexity, and find that an implementation runs $1,\!000\times$ faster and with $3,\!000\times$ less physical memory than non-sparse models. SAM learns with comparable data efficiency to existing models on a range of synthetic tasks and one-shot Omniglot character recognition, and can scale to tasks requiring $100,\!000$s of time steps and memories. As well, we show how our approach can be adapted for models that maintain temporal associations between memories, as with the recently introduced Differentiable Neural Computer.
Asynchronous Methods for Deep Reinforcement Learning
Jun 16, 2016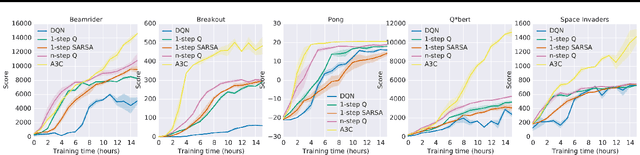
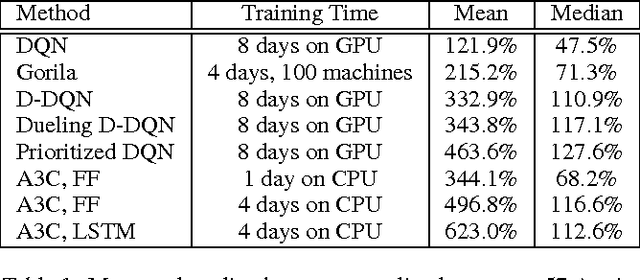
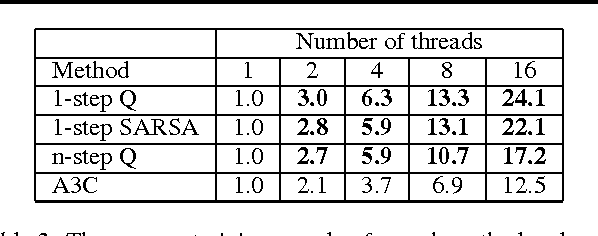
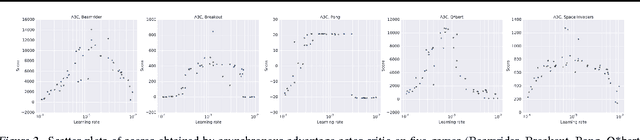
We propose a conceptually simple and lightweight framework for deep reinforcement learning that uses asynchronous gradient descent for optimization of deep neural network controllers. We present asynchronous variants of four standard reinforcement learning algorithms and show that parallel actor-learners have a stabilizing effect on training allowing all four methods to successfully train neural network controllers. The best performing method, an asynchronous variant of actor-critic, surpasses the current state-of-the-art on the Atari domain while training for half the time on a single multi-core CPU instead of a GPU. Furthermore, we show that asynchronous actor-critic succeeds on a wide variety of continuous motor control problems as well as on a new task of navigating random 3D mazes using a visual input.