 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman Instruction-Following with Deep Reinforcement Learning via Transfer-Learning from Text
May 19, 2020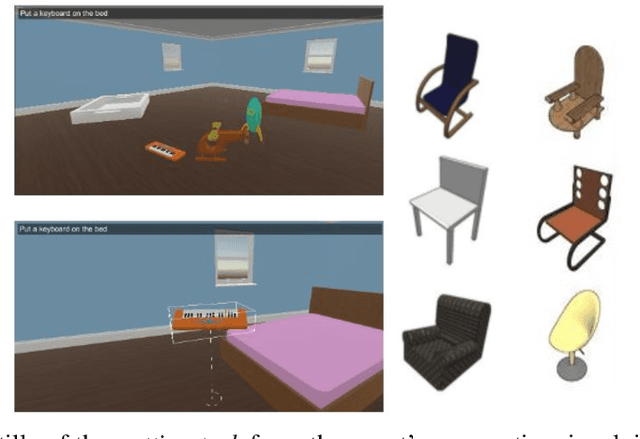
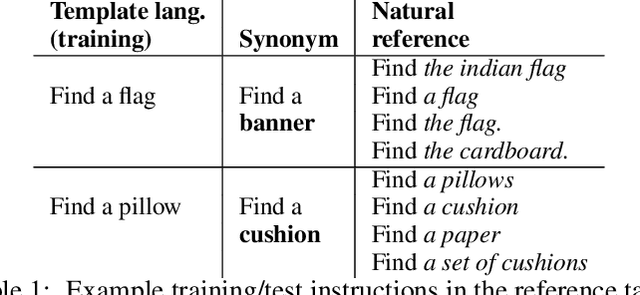
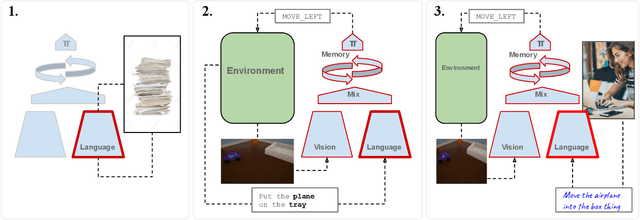

Recent work has described neural-network-based agents that are trained with reinforcement learning (RL) to execute language-like commands in simulated worlds, as a step towards an intelligent agent or robot that can be instructed by human users. However, the optimisation of multi-goal motor policies via deep RL from scratch requires many episodes of experience. Consequently, instruction-following with deep RL typically involves language generated from templates (by an environment simulator), which does not reflect the varied or ambiguous expressions of real users. Here, we propose a conceptually simple method for training instruction-following agents with deep RL that are robust to natural human instructions. By applying our method with a state-of-the-art pre-trained text-based language model (BERT), on tasks requiring agents to identify and position everyday objects relative to other objects in a naturalistic 3D simulated room, we demonstrate substantially-above-chance zero-shot transfer from synthetic template commands to natural instructions given by humans. Our approach is a general recipe for training any deep RL-based system to interface with human users, and bridges the gap between two research directions of notable recent success: agent-centric motor behavior and text-based representation learning.