 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiPaCo: Distributed Path Composition
Mar 15, 2024Progress in machine learning (ML) has been fueled by scaling neural network models. This scaling has been enabled by ever more heroic feats of engineering, necessary for accommodating ML approaches that require high bandwidth communication between devices working in parallel. In this work, we propose a co-designed modular architecture and training approach for ML models, dubbed DIstributed PAth COmposition (DiPaCo). During training, DiPaCo distributes computation by paths through a set of shared modules. Together with a Local-SGD inspired optimization (DiLoCo) that keeps modules in sync with drastically reduced communication, Our approach facilitates training across poorly connected and heterogeneous workers, with a design that ensures robustness to worker failures and preemptions. At inference time, only a single path needs to be executed for each input, without the need for any model compression. We consider this approach as a first prototype towards a new paradigm of large-scale learning, one that is less synchronous and more modular. Our experiments on the widely used C4 benchmark show that, for the same amount of training steps but less wall-clock time, DiPaCo exceeds the performance of a 1 billion-parameter dense transformer language model by choosing one of 256 possible paths, each with a size of 150 million parameters.
Asynchronous Local-SGD Training for Language Modeling
Jan 17, 2024



Local stochastic gradient descent (Local-SGD), also referred to as federated averaging, is an approach to distributed optimization where each device performs more than one SGD update per communication. This work presents an empirical study of {\it asynchronous} Local-SGD for training language models; that is, each worker updates the global parameters as soon as it has finished its SGD steps. We conduct a comprehensive investigation by examining how worker hardware heterogeneity, model size, number of workers, and optimizer could impact the learning performance. We find that with naive implementations, asynchronous Local-SGD takes more iterations to converge than its synchronous counterpart despite updating the (global) model parameters more frequently. We identify momentum acceleration on the global parameters when worker gradients are stale as a key challenge. We propose a novel method that utilizes a delayed Nesterov momentum update and adjusts the workers' local training steps based on their computation speed. This approach, evaluated with models up to 150M parameters on the C4 dataset, matches the performance of synchronous Local-SGD in terms of perplexity per update step, and significantly surpasses it in terms of wall clock time.
DiLoCo: Distributed Low-Communication Training of Language Models
Nov 14, 2023



Large language models (LLM) have become a critical component in many applications of machine learning. However, standard approaches to training LLM require a large number of tightly interconnected accelerators, with devices exchanging gradients and other intermediate states at each optimization step. While it is difficult to build and maintain a single computing cluster hosting many accelerators, it might be easier to find several computing clusters each hosting a smaller number of devices. In this work, we propose a distributed optimization algorithm, Distributed Low-Communication (DiLoCo), that enables training of language models on islands of devices that are poorly connected. The approach is a variant of federated averaging, where the number of inner steps is large, the inner optimizer is AdamW, and the outer optimizer is Nesterov momentum. On the widely used C4 dataset, we show that DiLoCo on 8 workers performs as well as fully synchronous optimization while communicating 500 times less. DiLoCo exhibits great robustness to the data distribution of each worker. It is also robust to resources becoming unavailable over time, and vice versa, it can seamlessly leverage resources that become available during training.
A data-driven approach for learning to control computers
Feb 16, 2022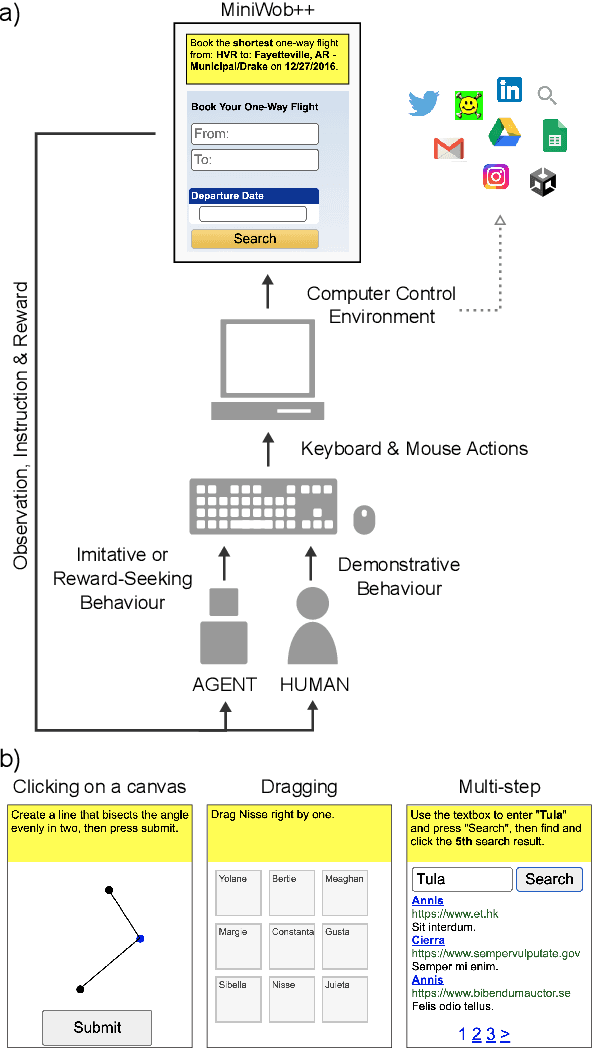
It would be useful for machines to use computers as humans do so that they can aid us in everyday tasks. This is a setting in which there is also the potential to leverage large-scale expert demonstrations and human judgements of interactive behaviour, which are two ingredients that have driven much recent success in AI. Here we investigate the setting of computer control using keyboard and mouse, with goals specified via natural language. Instead of focusing on hand-designed curricula and specialized action spaces, we focus on developing a scalable method centered on reinforcement learning combined with behavioural priors informed by actual human-computer interactions. We achieve state-of-the-art and human-level mean performance across all tasks within the MiniWob++ benchmark, a challenging suite of computer control problems, and find strong evidence of cross-task transfer. These results demonstrate the usefulness of a unified human-agent interface when training machines to use computers. Altogether our results suggest a formula for achieving competency beyond MiniWob++ and towards controlling computers, in general, as a human would.
Imitating Interactive Intelligence
Jan 21, 2021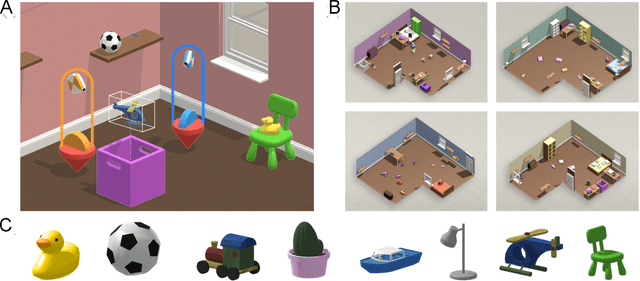
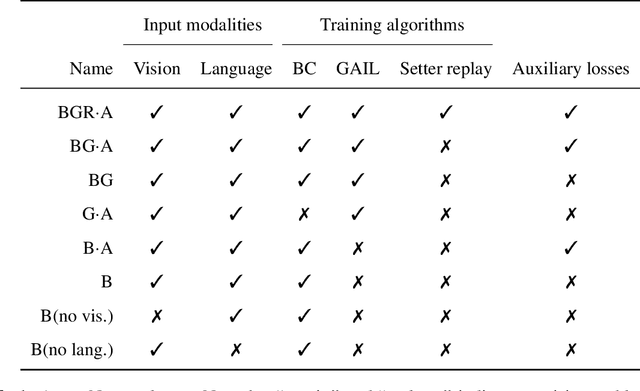
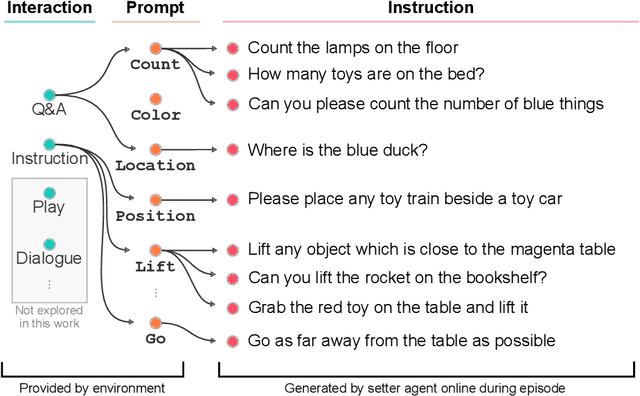
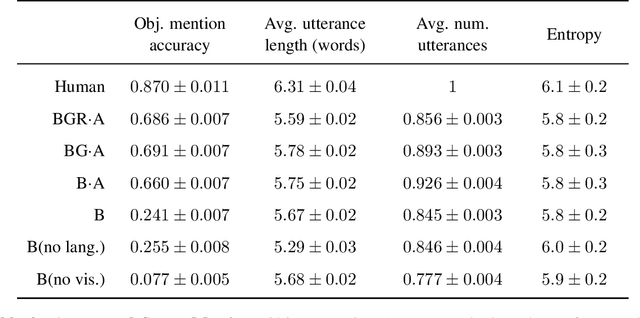
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. This setting nevertheless integrates a number of the central challenges of artificial intelligence (AI) research: complex visual perception and goal-directed physical control, grounded language comprehension and production, and multi-agent social interaction. To build agents that can robustly interact with humans, we would ideally train them while they interact with humans. However, this is presently impractical. Therefore, we approximate the role of the human with another learned agent, and use ideas from inverse reinforcement learning to reduce the disparities between human-human and agent-agent interactive behaviour. Rigorously evaluating our agents poses a great challenge, so we develop a variety of behavioural tests, including evaluation by humans who watch videos of agents or interact directly with them. These evaluations convincingly demonstrate that interactive training and auxiliary losses improve agent behaviour beyond what is achieved by supervised learning of actions alone. Further, we demonstrate that agent capabilities generalise beyond literal experiences in the dataset. Finally, we train evaluation models whose ratings of agents agree well with human judgement, thus permitting the evaluation of new agent models without additional effort. Taken together, our results in this virtual environment provide evidence that large-scale human behavioural imitation is a promising tool to create intelligent, interactive agents, and the challenge of reliably evaluating such agents is possible to surmount.