 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Definition of Disentangled Representations
Dec 05, 2018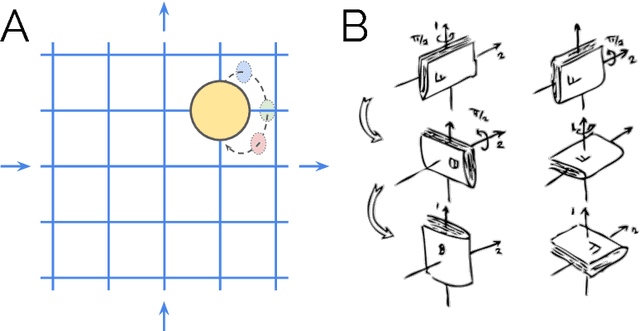
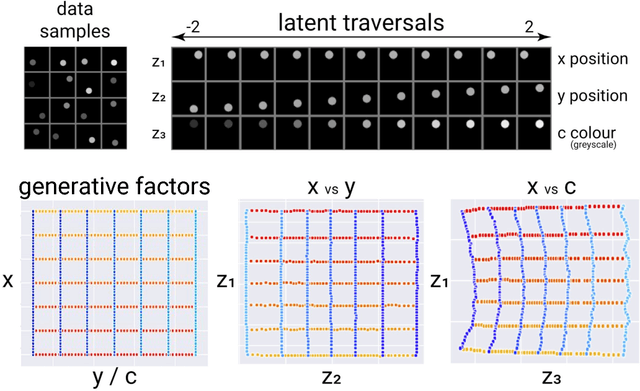
How can intelligent agents solve a diverse set of tasks in a data-efficient manner? The disentangled representation learning approach posits that such an agent would benefit from separating out (disentangling) the underlying structure of the world into disjoint parts of its representation. However, there is no generally agreed-upon definition of disentangling, not least because it is unclear how to formalise the notion of world structure beyond toy datasets with a known ground truth generative process. Here we propose that a principled solution to characterising disentangled representations can be found by focusing on the transformation properties of the world. In particular, we suggest that those transformations that change only some properties of the underlying world state, while leaving all other properties invariant, are what gives exploitable structure to any kind of data. Similar ideas have already been successfully applied in physics, where the study of symmetry transformations has revolutionised the understanding of the world structure. By connecting symmetry transformations to vector representations using the formalism of group and representation theory we arrive at the first formal definition of disentangled representations. Our new definition is in agreement with many of the current intuitions about disentangling, while also providing principled resolutions to a number of previous points of contention. While this work focuses on formally defining disentangling - as opposed to solving the learning problem - we believe that the shift in perspective to studying data transformations can stimulate the development of better representation learning algorithms.
Probing Physics Knowledge Using Tools from Developmental Psychology
Apr 03, 2018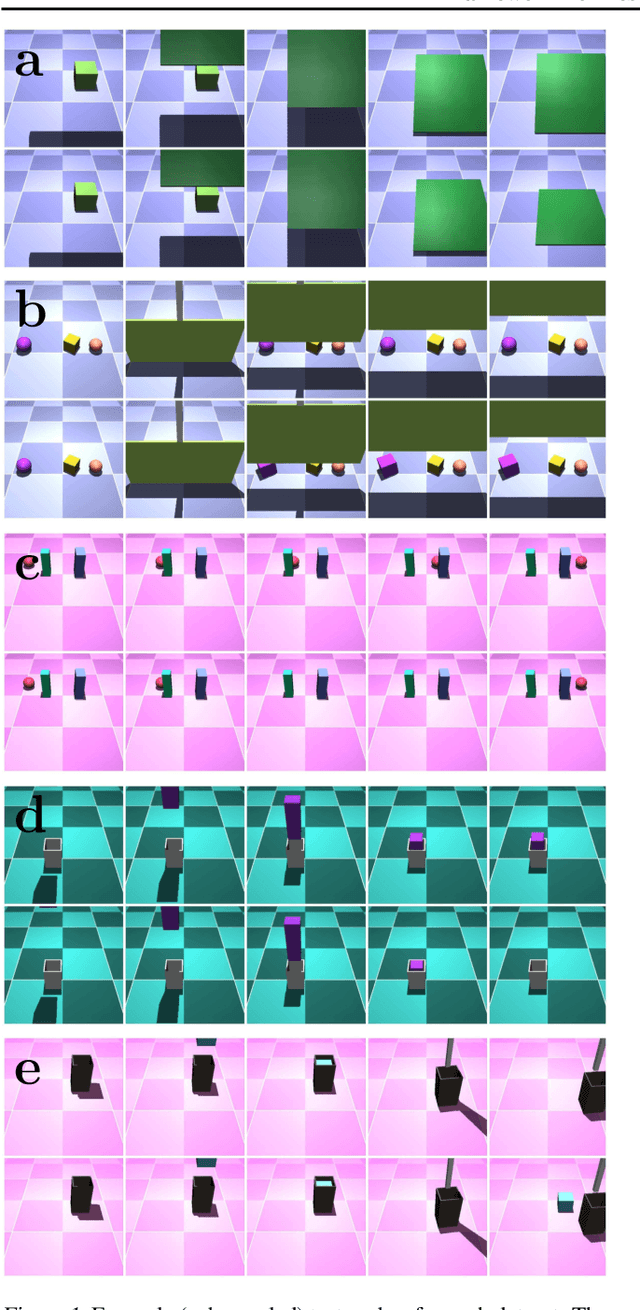
In order to build agents with a rich understanding of their environment, one key objective is to endow them with a grasp of intuitive physics; an ability to reason about three-dimensional objects, their dynamic interactions, and responses to forces. While some work on this problem has taken the approach of building in components such as ready-made physics engines, other research aims to extract general physical concepts directly from sensory data. In the latter case, one challenge that arises is evaluating the learning system. Research on intuitive physics knowledge in children has long employed a violation of expectations (VOE) method to assess children's mastery of specific physical concepts. We take the novel step of applying this method to artificial learning systems. In addition to introducing the VOE technique, we describe a set of probe datasets inspired by classic test stimuli from developmental psychology. We test a baseline deep learning system on this battery, as well as on a physics learning dataset ("IntPhys") recently posed by another research group. Our results show how the VOE technique may provide a useful tool for tracking physics knowledge in future research.
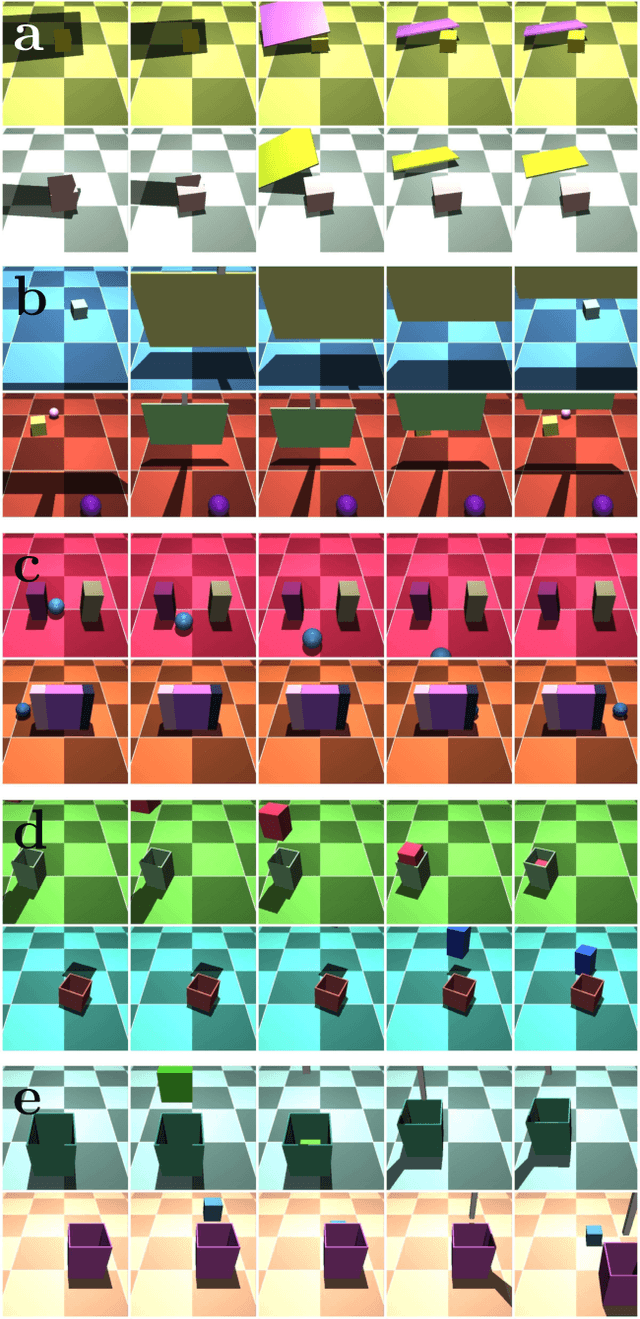
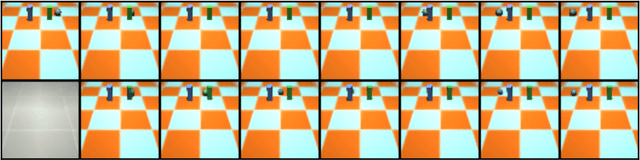
Unsupervised Predictive Memory in a Goal-Directed Agent
Mar 28, 2018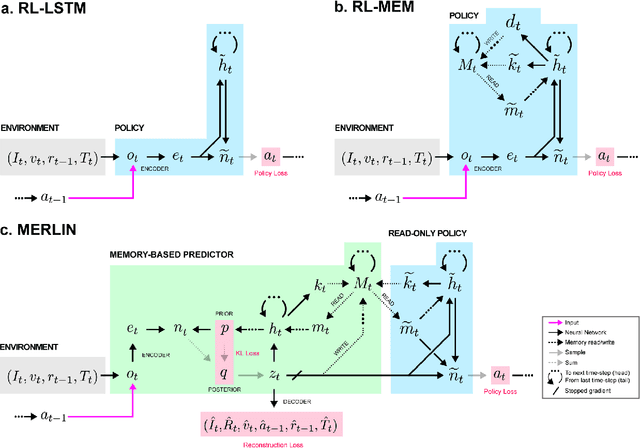
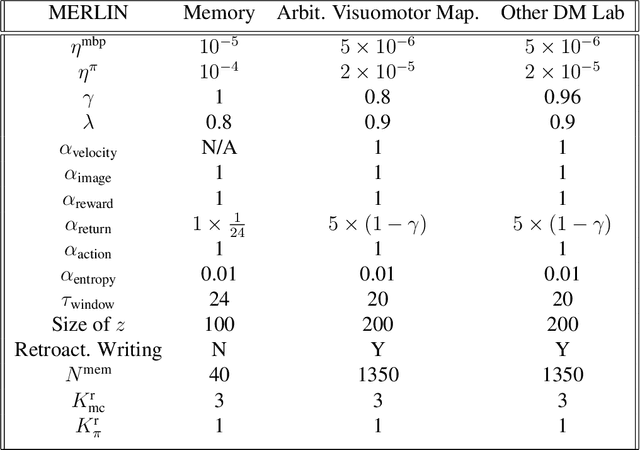
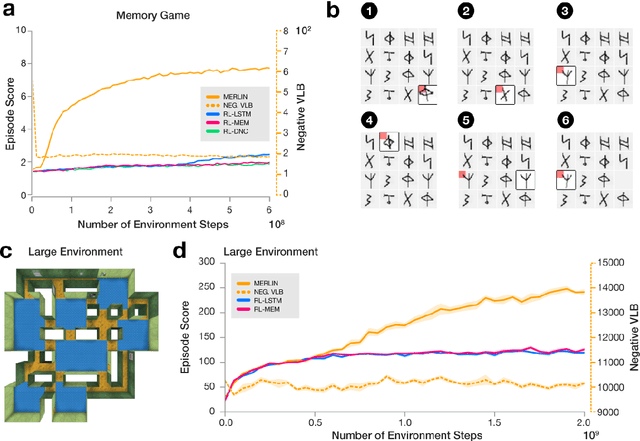
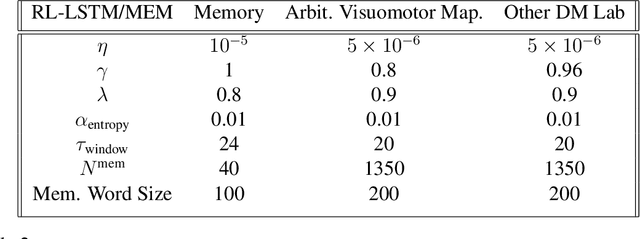
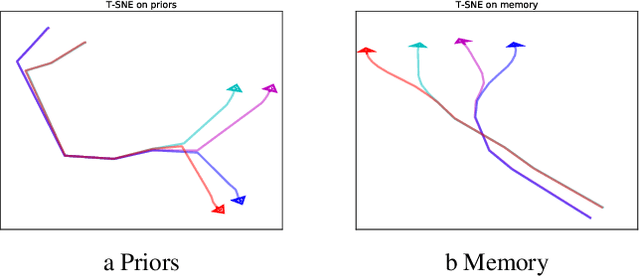
Animals execute goal-directed behaviours despite the limited range and scope of their sensors. To cope, they explore environments and store memories maintaining estimates of important information that is not presently available. Recently, progress has been made with artificial intelligence (AI) agents that learn to perform tasks from sensory input, even at a human level, by merging reinforcement learning (RL) algorithms with deep neural networks, and the excitement surrounding these results has led to the pursuit of related ideas as explanations of non-human animal learning. However, we demonstrate that contemporary RL algorithms struggle to solve simple tasks when enough information is concealed from the sensors of the agent, a property called "partial observability". An obvious requirement for handling partially observed tasks is access to extensive memory, but we show memory is not enough; it is critical that the right information be stored in the right format. We develop a model, the Memory, RL, and Inference Network (MERLIN), in which memory formation is guided by a process of predictive modeling. MERLIN facilitates the solution of tasks in 3D virtual reality environments for which partial observability is severe and memories must be maintained over long durations. Our model demonstrates a single learning agent architecture that can solve canonical behavioural tasks in psychology and neurobiology without strong simplifying assumptions about the dimensionality of sensory input or the duration of experiences.
Can Neural Networks Understand Logical Entailment?
Feb 23, 2018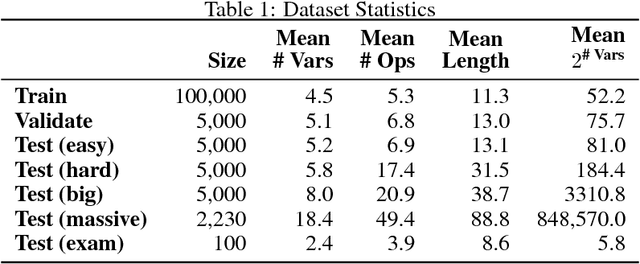
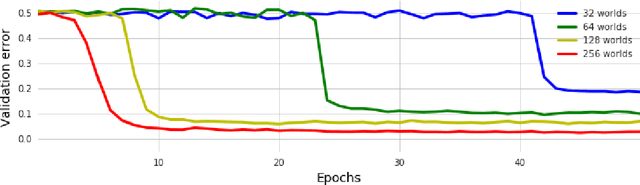
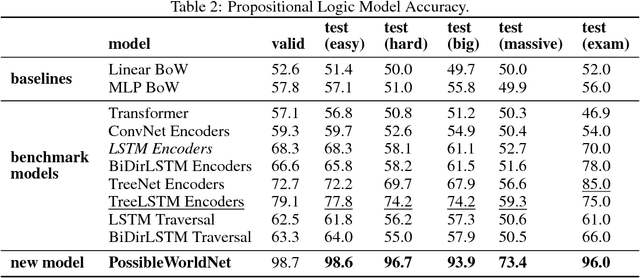
We introduce a new dataset of logical entailments for the purpose of measuring models' ability to capture and exploit the structure of logical expressions against an entailment prediction task. We use this task to compare a series of architectures which are ubiquitous in the sequence-processing literature, in addition to a new model class---PossibleWorldNets---which computes entailment as a "convolution over possible worlds". Results show that convolutional networks present the wrong inductive bias for this class of problems relative to LSTM RNNs, tree-structured neural networks outperform LSTM RNNs due to their enhanced ability to exploit the syntax of logic, and PossibleWorldNets outperform all benchmarks.
Psychlab: A Psychology Laboratory for Deep Reinforcement Learning Agents
Feb 04, 2018
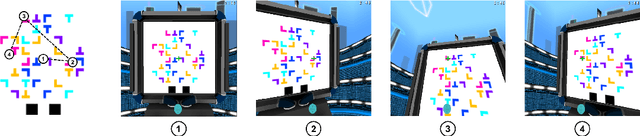
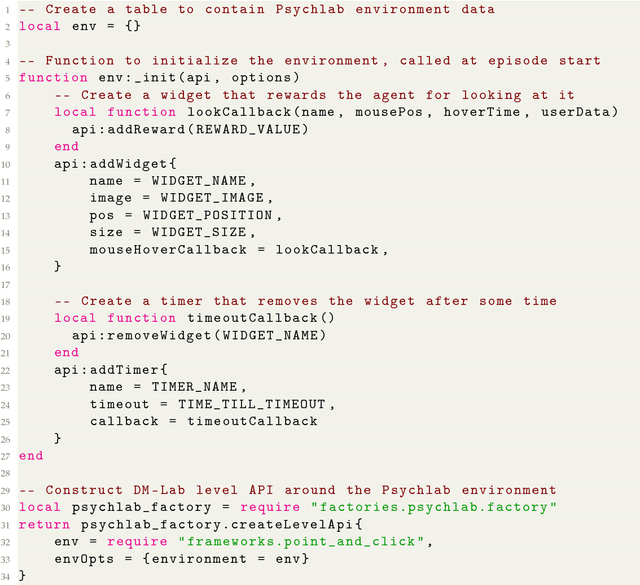
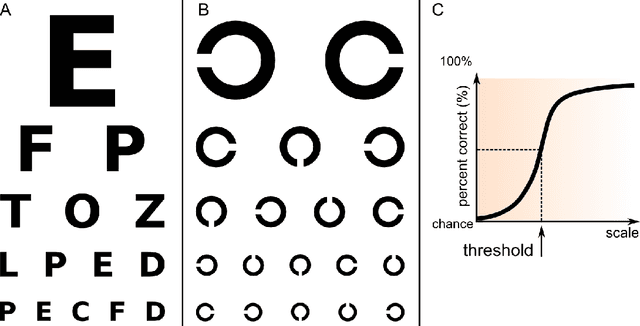
Psychlab is a simulated psychology laboratory inside the first-person 3D game world of DeepMind Lab (Beattie et al. 2016). Psychlab enables implementations of classical laboratory psychological experiments so that they work with both human and artificial agents. Psychlab has a simple and flexible API that enables users to easily create their own tasks. As examples, we are releasing Psychlab implementations of several classical experimental paradigms including visual search, change detection, random dot motion discrimination, and multiple object tracking. We also contribute a study of the visual psychophysics of a specific state-of-the-art deep reinforcement learning agent: UNREAL (Jaderberg et al. 2016). This study leads to the surprising conclusion that UNREAL learns more quickly about larger target stimuli than it does about smaller stimuli. In turn, this insight motivates a specific improvement in the form of a simple model of foveal vision that turns out to significantly boost UNREAL's performance, both on Psychlab tasks, and on standard DeepMind Lab tasks. By open-sourcing Psychlab we hope to facilitate a range of future such studies that simultaneously advance deep reinforcement learning and improve its links with cognitive science.
Generative Temporal Models with Memory
Feb 21, 2017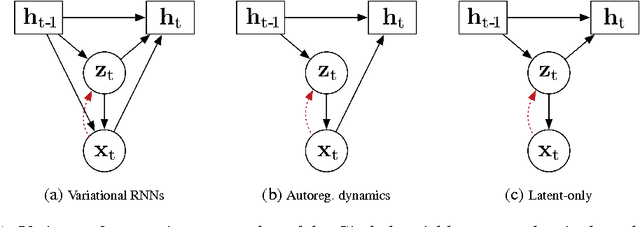

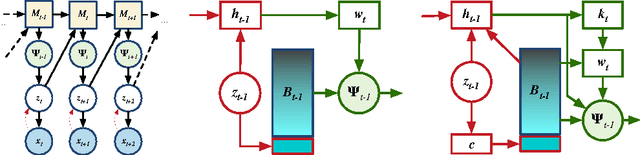

We consider the general problem of modeling temporal data with long-range dependencies, wherein new observations are fully or partially predictable based on temporally-distant, past observations. A sufficiently powerful temporal model should separate predictable elements of the sequence from unpredictable elements, express uncertainty about those unpredictable elements, and rapidly identify novel elements that may help to predict the future. To create such models, we introduce Generative Temporal Models augmented with external memory systems. They are developed within the variational inference framework, which provides both a practical training methodology and methods to gain insight into the models' operation. We show, on a range of problems with sparse, long-term temporal dependencies, that these models store information from early in a sequence, and reuse this stored information efficiently. This allows them to perform substantially better than existing models based on well-known recurrent neural networks, like LSTMs.