 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImpartial Selection with Predictions
Oct 21, 2025We study the selection of agents based on mutual nominations, a theoretical problem with many applications from committee selection to AI alignment. As agents both select and are selected, they may be incentivized to misrepresent their true opinion about the eligibility of others to influence their own chances of selection. Impartial mechanisms circumvent this issue by guaranteeing that the selection of an agent is independent of the nominations cast by that agent. Previous research has established strong bounds on the performance of impartial mechanisms, measured by their ability to approximate the number of nominations for the most highly nominated agents. We study to what extent the performance of impartial mechanisms can be improved if they are given a prediction of a set of agents receiving a maximum number of nominations. Specifically, we provide bounds on the consistency and robustness of such mechanisms, where consistency measures the performance of the mechanisms when the prediction is accurate and robustness its performance when the prediction is inaccurate. For the general setting where up to $k$ agents are to be selected and agents nominate any number of other agents, we give a mechanism with consistency $1-O\big(\frac{1}{k}\big)$ and robustness $1-\frac{1}{e}-O\big(\frac{1}{k}\big)$. For the special case of selecting a single agent based on a single nomination per agent, we prove that $1$-consistency can be achieved while guaranteeing $\frac{1}{2}$-robustness. A close comparison with previous results shows that (asymptotically) optimal consistency can be achieved with little to no sacrifice in terms of robustness.
A convoy of magnetic millirobots transports endoscopic instruments for minimally-invasive surgery
Feb 26, 2025Small-scale robots offer significant potential in minimally-invasive medical procedures. Due to the nature of soft biological tissues, however, robots are exposed to complex environments with various challenges in locomotion, which is essential to overcome for useful medical tasks. A single mini-robot often provides insufficient force on slippery biological surfaces to carry medical instruments, such as a fluid catheter or an electrical wire. Here, for the first time, we report a team of millirobots (TrainBot) that can generate around two times higher actuating force than a TrainBot unit by forming a convoy to collaboratively carry long and heavy cargos. The feet of each unit are optimized to increase the propulsive force around three times so that it can effectively crawl on slippery biological surfaces. A human-scale permanent magnetic set-up is developed to wirelessly actuate and control the TrainBot to transport heavy and lengthy loads through narrow biological lumens, such as the intestine and the bile duct. We demonstrate the first electrocauterization performed by the TrainBot to relieve a biliary obstruction and open a tunnel for fluid drainage and drug delivery. The developed technology sheds light on the collaborative strategy of small-scale robots for future minimally-invasive surgical procedures.
Miniature magneto-oscillatory wireless sensor for magnetic field and gradient measurements
Oct 22, 2024
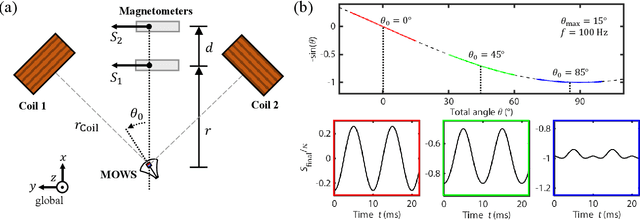


Magneto-oscillatory devices have been recently developed as very potent wireless miniature position trackers and sensors with an exceptional accuracy and sensing distance for surgical and robotic applications. However, it is still unclear to which extend a mechanically resonating sub-millimeter magnet interacts with external magnetic fields or gradients, which induce frequency shifts of sub-mHz to several Hz and therefore affect the sensing accuracy. Here, we investigate this effect experimentally on a cantilever-based magneto-oscillatory wireless sensor (MOWS) and build an analytical model concerning magnetic and mechanical interactions. The millimeter-scale MOWS is capable to detect magnetic fields with sub-uT resolution to at least +/- 5 mT, and simultaneously detects magnetic field gradients with a resolution of 65 uT/m to at least +/- 50 mT/m. The magnetic field sensitivity allows direct calculation of mechanical device properties, and by rotation, individual contributions of the magnetic field and gradient can be analyzed. The derived model is general and can be applied to other magneto-oscillatory systems interacting with magnetic environments.
* Main text: 7 pages with figures; Supplementary materials 6 pages with figures
Magneto-oscillatory localization for small-scale robots
Oct 22, 2024Magnetism is widely used for the wireless localization and actuation of robots and devices for medical procedures. However, current static magnetic localization methods suffer from large required magnets and are limited to only five degrees of freedom due to a fundamental constraint of the rotational symmetry around the magnetic axis. We present the small-scale magneto-oscillatory localization (SMOL) method, which is capable of wirelessly localizing a millimeter-scale tracker with full six degrees of freedom in deep biological tissues. The SMOL device uses the temporal oscillation of a mechanically resonant cantilever with a magnetic dipole to break the rotational symmetry, and exploits the frequency-response to achieve a high signal-to-noise ratio with sub-millimeter accuracy over a large distance of up to 12 centimeters and quasi-continuous refresh rates up to 200 Hz. Integration into real-time closed-loop controlled robots and minimally-invasive surgical tools are demonstrated to reveal the vast potential of the SMOL method.
* Pages 1-35 main text (incl. 4 figures), pages 36-57 supplementary materials
A Magnetic Millirobot Walks on Slippery Biological Surfaces for Targeted Cargo Delivery
Mar 07, 2024



Small-scale robots hold great potential for targeted cargo delivery in minimally-inv asive medicine. However, current robots often face challenges to locomote efficiently on slip pery biological tissue surfaces, especially when loaded with heavy cargos. Here, we report a magnetic millirobot that can walk on rough and slippery biological tissues by anchoring itself on the soft tissue surface alternatingly with two feet and reciprocally rotating the body to mov e forward. We experimentally studied the locomotion, validated it with numerical simulations and optimized the actuation parameters to fit various terrains and loading conditions. Further more, we developed a permanent magnet set-up to enable wireless actuation within a huma n-scale volume which allows precise control of the millirobot to follow complex trajectories, cl imb vertical walls, and carry cargo up to four times of its own weight. Upon reaching the targ et location, it performs a deployment sequence to release the liquid drug into tissues. The ro bust gait of our millirobot on rough biological terrains, combined with its heavy load capacity, make it a versatile and effective miniaturized vehicle for targeted cargo delivery.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Creating Multimodal Interactive Agents with Imitation and Self-Supervised Learning
Dec 07, 2021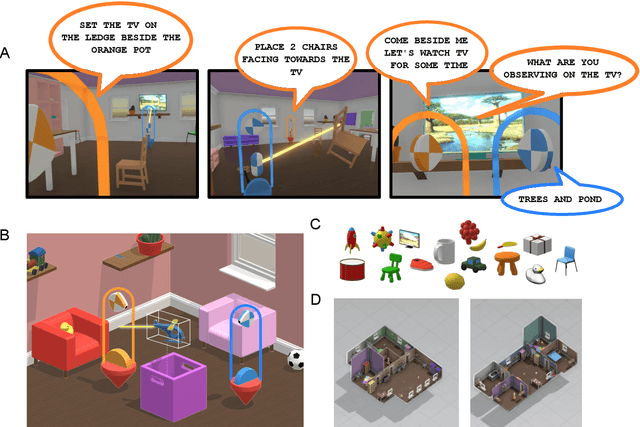
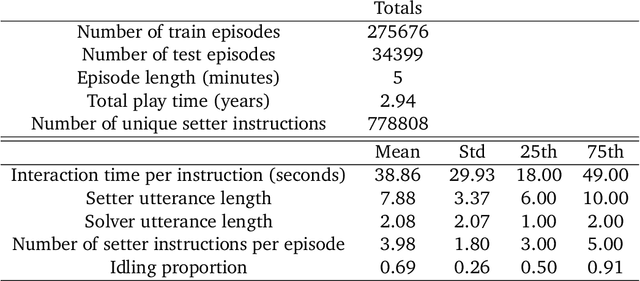
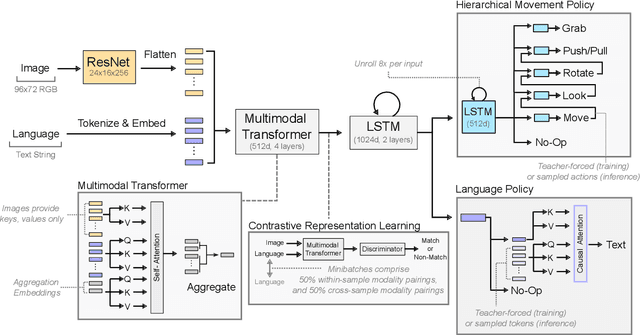
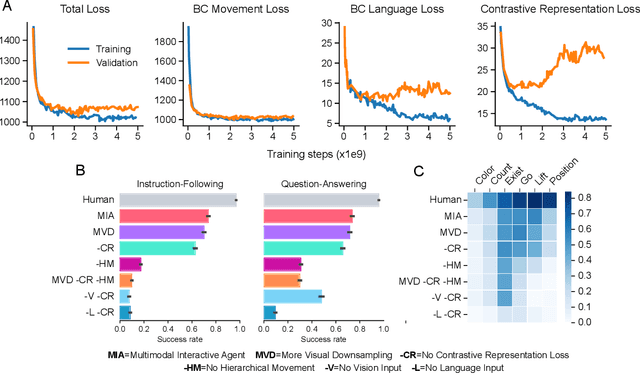
A common vision from science fiction is that robots will one day inhabit our physical spaces, sense the world as we do, assist our physical labours, and communicate with us through natural language. Here we study how to design artificial agents that can interact naturally with humans using the simplification of a virtual environment. We show that imitation learning of human-human interactions in a simulated world, in conjunction with self-supervised learning, is sufficient to produce a multimodal interactive agent, which we call MIA, that successfully interacts with non-adversarial humans 75% of the time. We further identify architectural and algorithmic techniques that improve performance, such as hierarchical action selection. Altogether, our results demonstrate that imitation of multi-modal, real-time human behaviour may provide a straightforward and surprisingly effective means of imbuing agents with a rich behavioural prior from which agents might then be fine-tuned for specific purposes, thus laying a foundation for training capable agents for interactive robots or digital assistants. A video of MIA's behaviour may be found at https://youtu.be/ZFgRhviF7mY
Payment Rules through Discriminant-Based Classifiers
Aug 06, 2012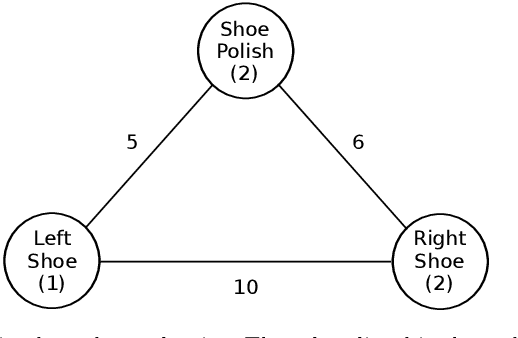
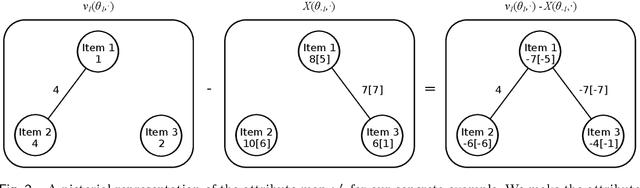
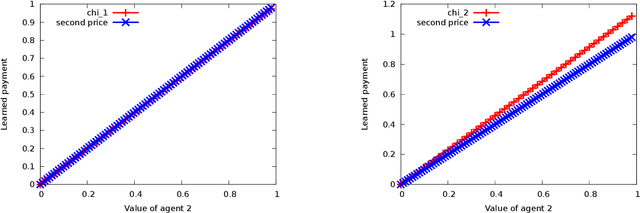
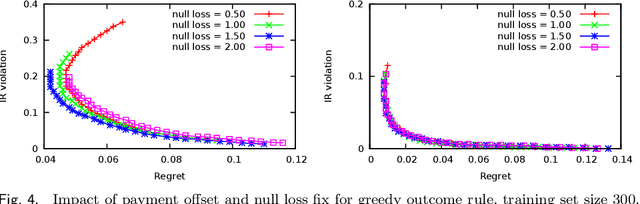
In mechanism design it is typical to impose incentive compatibility and then derive an optimal mechanism subject to this constraint. By replacing the incentive compatibility requirement with the goal of minimizing expected ex post regret, we are able to adapt statistical machine learning techniques to the design of payment rules. This computational approach to mechanism design is applicable to domains with multi-dimensional types and situations where computational efficiency is a concern. Specifically, given an outcome rule and access to a type distribution, we train a support vector machine with a special discriminant function structure such that it implicitly establishes a payment rule with desirable incentive properties. We discuss applications to a multi-minded combinatorial auction with a greedy winner-determination algorithm and to an assignment problem with egalitarian outcome rule. Experimental results demonstrate both that the construction produces payment rules with low ex post regret, and that penalizing classification errors is effective in preventing failures of ex post individual rationality.
Sum of Us: Strategyproof Selection from the Selectors
Oct 25, 2009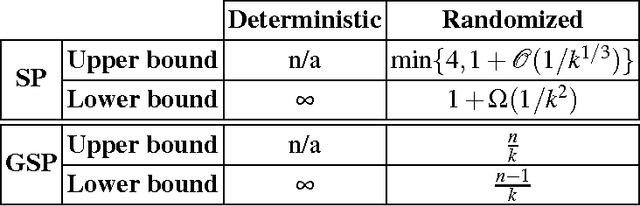
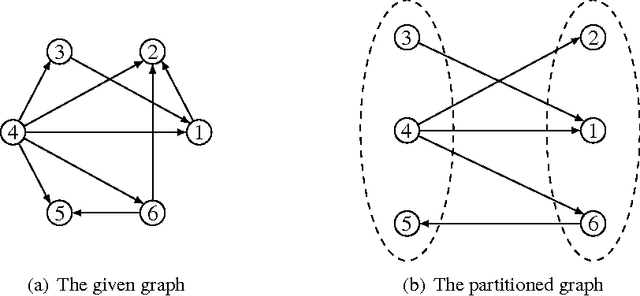
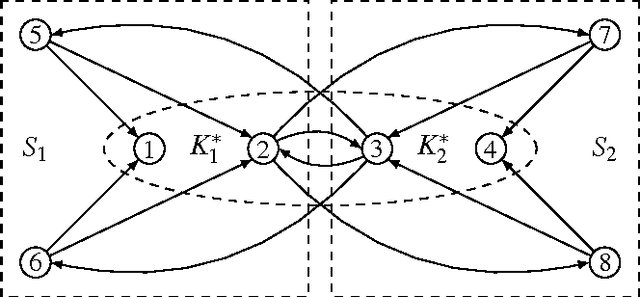

We consider directed graphs over a set of n agents, where an edge (i,j) is taken to mean that agent i supports or trusts agent j. Given such a graph and an integer k\leq n, we wish to select a subset of k agents that maximizes the sum of indegrees, i.e., a subset of k most popular or most trusted agents. At the same time we assume that each individual agent is only interested in being selected, and may misreport its outgoing edges to this end. This problem formulation captures realistic scenarios where agents choose among themselves, which can be found in the context of Internet search, social networks like Twitter, or reputation systems like Epinions. Our goal is to design mechanisms without payments that map each graph to a k-subset of agents to be selected and satisfy the following two constraints: strategyproofness, i.e., agents cannot benefit from misreporting their outgoing edges, and approximate optimality, i.e., the sum of indegrees of the selected subset of agents is always close to optimal. Our first main result is a surprising impossibility: for k \in {1,...,n-1}, no deterministic strategyproof mechanism can provide a finite approximation ratio. Our second main result is a randomized strategyproof mechanism with an approximation ratio that is bounded from above by four for any value of k, and approaches one as k grows.