 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagneto-oscillatory localization for small-scale robots
Oct 22, 2024Magnetism is widely used for the wireless localization and actuation of robots and devices for medical procedures. However, current static magnetic localization methods suffer from large required magnets and are limited to only five degrees of freedom due to a fundamental constraint of the rotational symmetry around the magnetic axis. We present the small-scale magneto-oscillatory localization (SMOL) method, which is capable of wirelessly localizing a millimeter-scale tracker with full six degrees of freedom in deep biological tissues. The SMOL device uses the temporal oscillation of a mechanically resonant cantilever with a magnetic dipole to break the rotational symmetry, and exploits the frequency-response to achieve a high signal-to-noise ratio with sub-millimeter accuracy over a large distance of up to 12 centimeters and quasi-continuous refresh rates up to 200 Hz. Integration into real-time closed-loop controlled robots and minimally-invasive surgical tools are demonstrated to reveal the vast potential of the SMOL method.
* Pages 1-35 main text (incl. 4 figures), pages 36-57 supplementary materials
Miniature magneto-oscillatory wireless sensor for magnetic field and gradient measurements
Oct 22, 2024
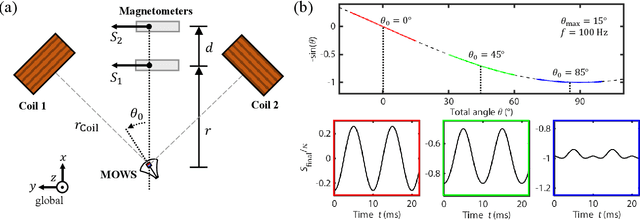


Magneto-oscillatory devices have been recently developed as very potent wireless miniature position trackers and sensors with an exceptional accuracy and sensing distance for surgical and robotic applications. However, it is still unclear to which extend a mechanically resonating sub-millimeter magnet interacts with external magnetic fields or gradients, which induce frequency shifts of sub-mHz to several Hz and therefore affect the sensing accuracy. Here, we investigate this effect experimentally on a cantilever-based magneto-oscillatory wireless sensor (MOWS) and build an analytical model concerning magnetic and mechanical interactions. The millimeter-scale MOWS is capable to detect magnetic fields with sub-uT resolution to at least +/- 5 mT, and simultaneously detects magnetic field gradients with a resolution of 65 uT/m to at least +/- 50 mT/m. The magnetic field sensitivity allows direct calculation of mechanical device properties, and by rotation, individual contributions of the magnetic field and gradient can be analyzed. The derived model is general and can be applied to other magneto-oscillatory systems interacting with magnetic environments.
* Main text: 7 pages with figures; Supplementary materials 6 pages with figures
A Magnetic Millirobot Walks on Slippery Biological Surfaces for Targeted Cargo Delivery
Mar 07, 2024



Small-scale robots hold great potential for targeted cargo delivery in minimally-inv asive medicine. However, current robots often face challenges to locomote efficiently on slip pery biological tissue surfaces, especially when loaded with heavy cargos. Here, we report a magnetic millirobot that can walk on rough and slippery biological tissues by anchoring itself on the soft tissue surface alternatingly with two feet and reciprocally rotating the body to mov e forward. We experimentally studied the locomotion, validated it with numerical simulations and optimized the actuation parameters to fit various terrains and loading conditions. Further more, we developed a permanent magnet set-up to enable wireless actuation within a huma n-scale volume which allows precise control of the millirobot to follow complex trajectories, cl imb vertical walls, and carry cargo up to four times of its own weight. Upon reaching the targ et location, it performs a deployment sequence to release the liquid drug into tissues. The ro bust gait of our millirobot on rough biological terrains, combined with its heavy load capacity, make it a versatile and effective miniaturized vehicle for targeted cargo delivery.
A Miniaturized Device for Ultrafast On-demand Drug Release based on a Gigahertz Ultrasonic Resonator
Mar 05, 2024On-demand controlled drug delivery is essential for the treatment of a wide range of chronic diseases. As the drug is released at the time when required, its efficacy is boosted and the side effects are minimized. However, so far, drug delivery devices often rely on the passive diffusion process for a sustained release, which is slow and uncontrollable. Here, we present a miniaturized microfluidic device for wirelessly controlled ultrafast active drug delivery, driven by an oscillating solid-liquid interface. The oscillation generates acoustic streaming in the drug reservoir, which opens an elastic valve to deliver the drug. High-speed microscopy reveals the fast response of the valve on the order of 1 ms, which is more than three orders of magnitude faster than the start-of-the-art. The amount of the released drug exhibits a linear relationship with the working time and the electric power applied to the ultrasonic resonator. The trigger of the release is wirelessly controlled via a magnetic field, and the system shows stable output in a continuous experiment for two weeks. The integrated system shows great promise as a long-term controlled drug delivery implant for chronic diseases.
* 19 pages, 6 figures, 1 table