 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMagneto-oscillatory localization for small-scale robots
Oct 22, 2024Magnetism is widely used for the wireless localization and actuation of robots and devices for medical procedures. However, current static magnetic localization methods suffer from large required magnets and are limited to only five degrees of freedom due to a fundamental constraint of the rotational symmetry around the magnetic axis. We present the small-scale magneto-oscillatory localization (SMOL) method, which is capable of wirelessly localizing a millimeter-scale tracker with full six degrees of freedom in deep biological tissues. The SMOL device uses the temporal oscillation of a mechanically resonant cantilever with a magnetic dipole to break the rotational symmetry, and exploits the frequency-response to achieve a high signal-to-noise ratio with sub-millimeter accuracy over a large distance of up to 12 centimeters and quasi-continuous refresh rates up to 200 Hz. Integration into real-time closed-loop controlled robots and minimally-invasive surgical tools are demonstrated to reveal the vast potential of the SMOL method.
* Pages 1-35 main text (incl. 4 figures), pages 36-57 supplementary materials
Space-Filling Subset Selection for an Electric Battery Model
Dec 07, 2020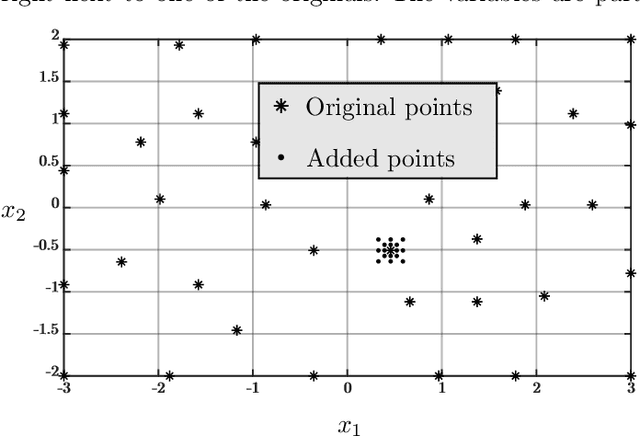
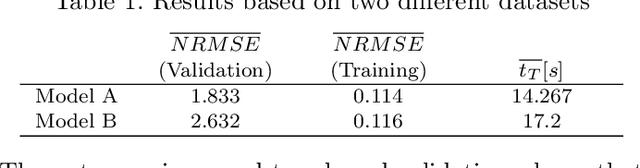
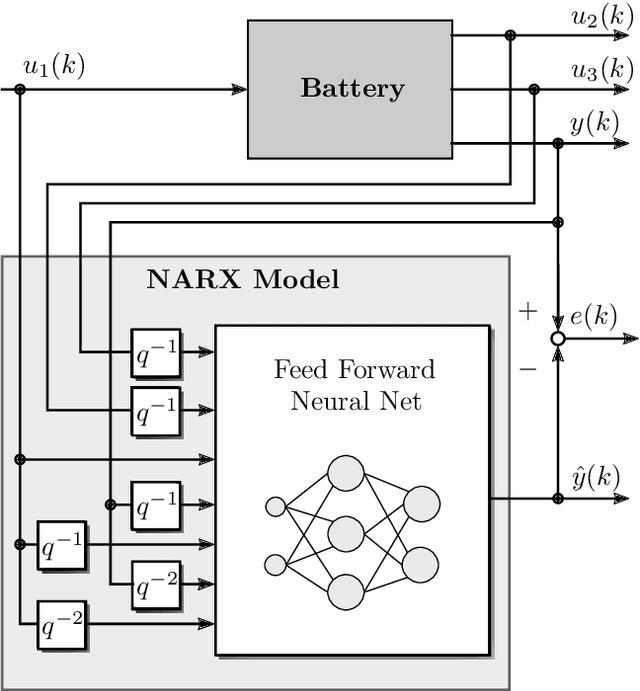
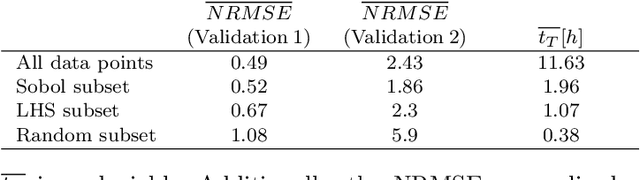
Dynamic models of the battery performance are an essential tool throughout the development process of automotive drive trains. The present study introduces a method making a large data set suitable for modeling the electrical impedance. When obtaining data-driven models, a usual assumption is that more observations produce better models. However, real driving data on the battery's behavior represent a strongly non-uniform excitation of the system, which negatively affects the modeling. For that reason, a subset selection of the available data was developed. It aims at building accurate nonlinear autoregressive exogenous (NARX) models more efficiently. The algorithm selects those dynamic data points that fill the input space of the nonlinear model more homogeneously. It is shown, that this reduction of the training data leads to a higher model quality in comparison to a random subset and a faster training compared to modeling using all data points.