 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning and the Deadly Triad
Paper and Code
Dec 06, 2018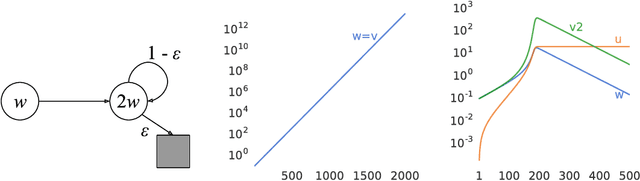
We know from reinforcement learning theory that temporal difference learning can fail in certain cases. Sutton and Barto (2018) identify a deadly triad of function approximation, bootstrapping, and off-policy learning. When these three properties are combined, learning can diverge with the value estimates becoming unbounded. However, several algorithms successfully combine these three properties, which indicates that there is at least a partial gap in our understanding. In this work, we investigate the impact of the deadly triad in practice, in the context of a family of popular deep reinforcement learning models - deep Q-networks trained with experience replay - analysing how the components of this system play a role in the emergence of the deadly triad, and in the agent's performance