 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransformers need glasses! Information over-squashing in language tasks
Jun 06, 2024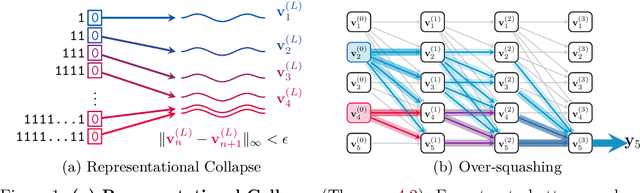
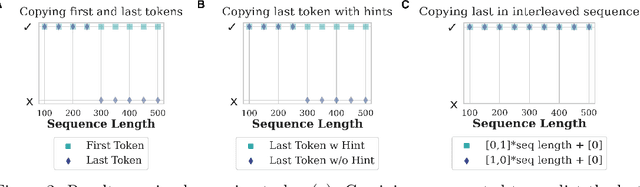
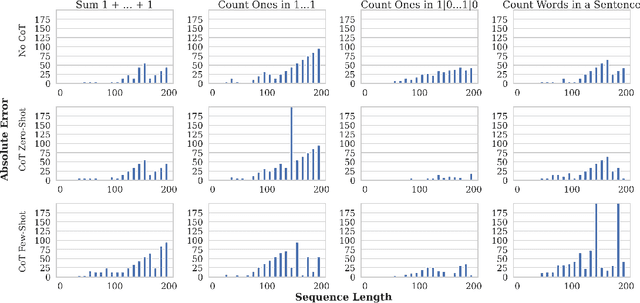
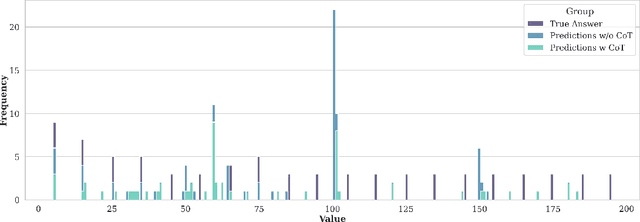
We study how information propagates in decoder-only Transformers, which are the architectural backbone of most existing frontier large language models (LLMs). We rely on a theoretical signal propagation analysis -- specifically, we analyse the representations of the last token in the final layer of the Transformer, as this is the representation used for next-token prediction. Our analysis reveals a representational collapse phenomenon: we prove that certain distinct sequences of inputs to the Transformer can yield arbitrarily close representations in the final token. This effect is exacerbated by the low-precision floating-point formats frequently used in modern LLMs. As a result, the model is provably unable to respond to these sequences in different ways -- leading to errors in, e.g., tasks involving counting or copying. Further, we show that decoder-only Transformer language models can lose sensitivity to specific tokens in the input, which relates to the well-known phenomenon of over-squashing in graph neural networks. We provide empirical evidence supporting our claims on contemporary LLMs. Our theory also points to simple solutions towards ameliorating these issues.
Synth$^2$: Boosting Visual-Language Models with Synthetic Captions and Image Embeddings
Mar 12, 2024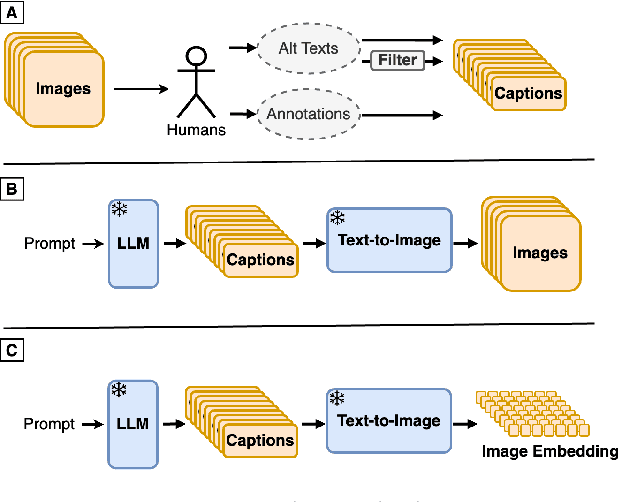
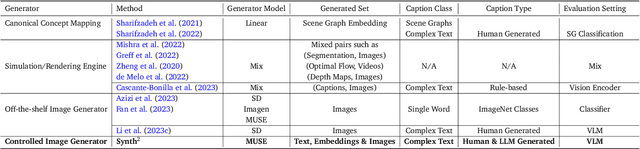
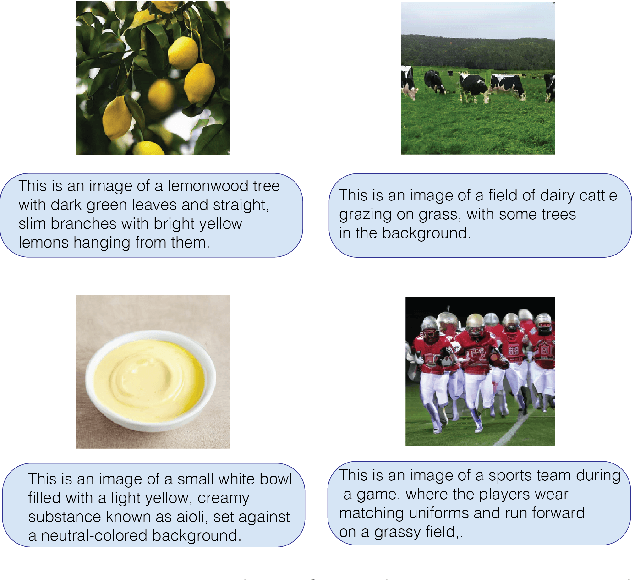

The creation of high-quality human-labeled image-caption datasets presents a significant bottleneck in the development of Visual-Language Models (VLMs). We propose a novel approach that leverages the strengths of Large Language Models (LLMs) and image generation models to create synthetic image-text pairs for efficient and effective VLM training. Our method employs pretraining a text-to-image model to synthesize image embeddings starting from captions generated by an LLM. These synthetic pairs are then used to train a VLM. Extensive experiments demonstrate that the VLM trained with synthetic data exhibits comparable performance on image captioning, while requiring a fraction of the data used by models trained solely on human-annotated data. In particular, we outperform the baseline by 17% through augmentation with a synthetic dataset. Furthermore, we show that synthesizing in the image embedding space is 25% faster than in the pixel space. This research introduces a promising technique for generating large-scale, customizable image datasets, leading to enhanced VLM performance and wider applicability across various domains, all with improved data efficiency and resource utilization.
A Simple Approach for State-Action Abstraction using a Learned MDP Homomorphism
Sep 14, 2022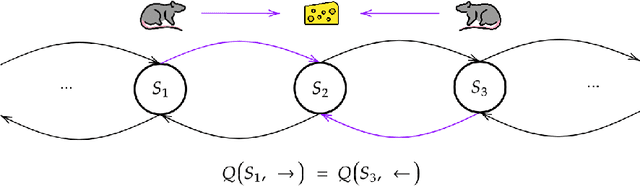
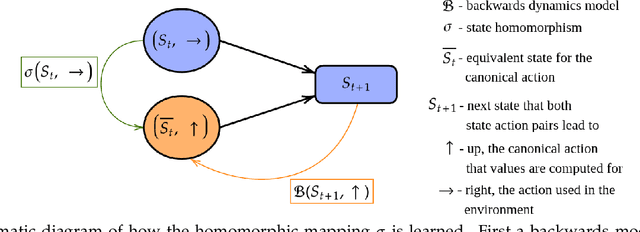
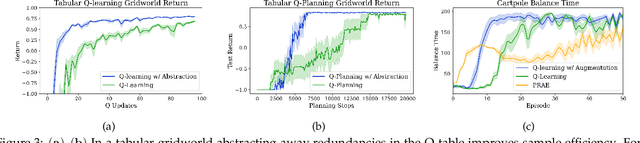
Animals are able to rapidly infer from limited experience when sets of state action pairs have equivalent reward and transition dynamics. On the other hand, modern reinforcement learning systems must painstakingly learn through trial and error that sets of state action pairs are value equivalent -- requiring an often prohibitively large amount of samples from their environment. MDP homomorphisms have been proposed that reduce the observed MDP of an environment to an abstract MDP, which can enable more sample efficient policy learning. Consequently, impressive improvements in sample efficiency have been achieved when a suitable MDP homomorphism can be constructed a priori -- usually by exploiting a practioner's knowledge of environment symmetries. We propose a novel approach to constructing a homomorphism in discrete action spaces, which uses a partial model of environment dynamics to infer which state action pairs lead to the same state -- reducing the size of the state-action space by a factor equal to the cardinality of the action space. We call this method equivalent effect abstraction. In a gridworld setting, we demonstrate empirically that equivalent effect abstraction can improve sample efficiency in a model-free setting and planning efficiency for modelbased approaches. Furthermore, we show on cartpole that our approach outperforms an existing method for learning homomorphisms, while using 33x less training data.
The CLRS Algorithmic Reasoning Benchmark
Jun 04, 2022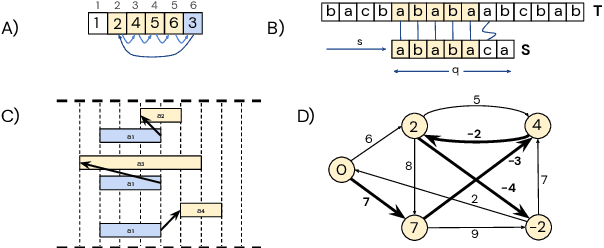
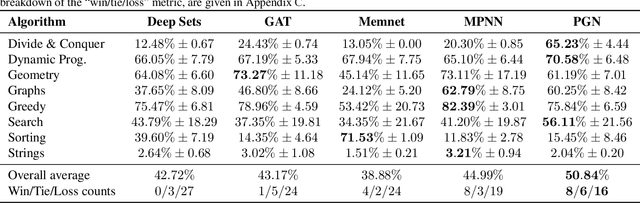

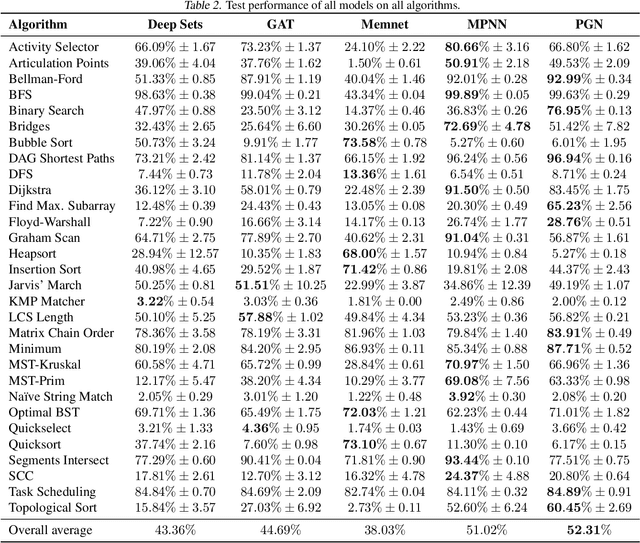
Learning representations of algorithms is an emerging area of machine learning, seeking to bridge concepts from neural networks with classical algorithms. Several important works have investigated whether neural networks can effectively reason like algorithms, typically by learning to execute them. The common trend in the area, however, is to generate targeted kinds of algorithmic data to evaluate specific hypotheses, making results hard to transfer across publications, and increasing the barrier of entry. To consolidate progress and work towards unified evaluation, we propose the CLRS Algorithmic Reasoning Benchmark, covering classical algorithms from the Introduction to Algorithms textbook. Our benchmark spans a variety of algorithmic reasoning procedures, including sorting, searching, dynamic programming, graph algorithms, string algorithms and geometric algorithms. We perform extensive experiments to demonstrate how several popular algorithmic reasoning baselines perform on these tasks, and consequently, highlight links to several open challenges. Our library is readily available at https://github.com/deepmind/clrs.
Semantic Exploration from Language Abstractions and Pretrained Representations
Apr 08, 2022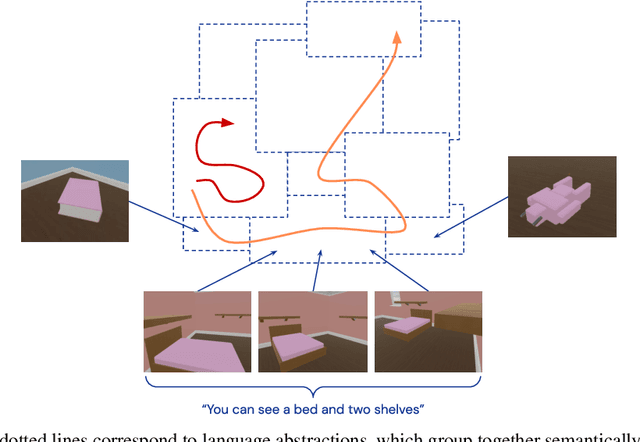
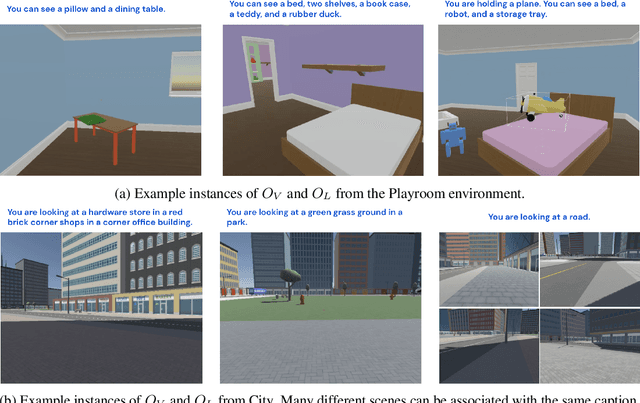
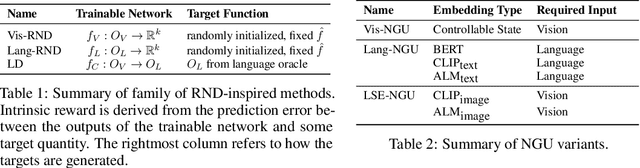
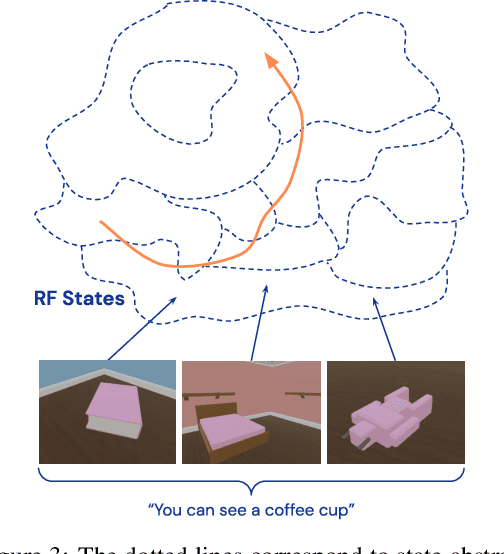
Continuous first-person 3D environments pose unique exploration challenges to reinforcement learning (RL) agents because of their high-dimensional state and action spaces. These challenges can be ameliorated by using semantically meaningful state abstractions to define novelty for exploration. We propose that learned representations shaped by natural language provide exactly this form of abstraction. In particular, we show that vision-language representations, when pretrained on image captioning datasets sampled from the internet, can drive meaningful, task-relevant exploration and improve performance on 3D simulated environments. We also characterize why and how language provides useful abstractions for exploration by comparing the impacts of using representations from a pretrained model, a language oracle, and several ablations. We demonstrate the benefits of our approach in two very different task domains -- one that stresses the identification and manipulation of everyday objects, and one that requires navigational exploration in an expansive world -- as well as two popular deep RL algorithms: Impala and R2D2. Our results suggest that using language-shaped representations could improve exploration for various algorithms and agents in challenging environments.
Retrieval-Augmented Reinforcement Learning
Mar 09, 2022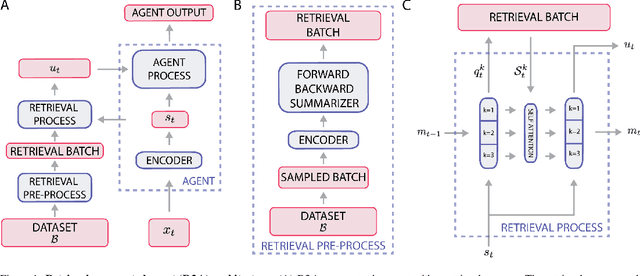
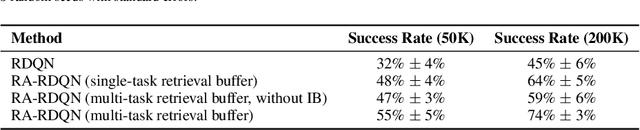
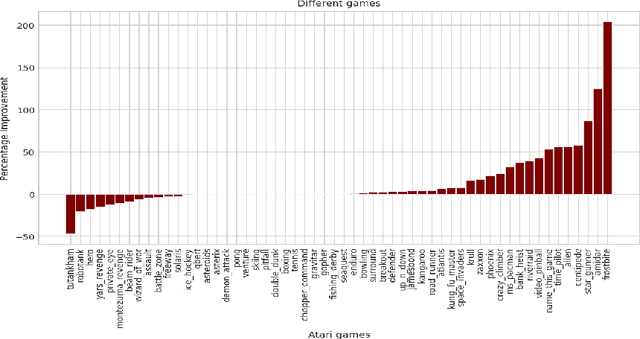
Most deep reinforcement learning (RL) algorithms distill experience into parametric behavior policies or value functions via gradient updates. While effective, this approach has several disadvantages: (1) it is computationally expensive, (2) it can take many updates to integrate experiences into the parametric model, (3) experiences that are not fully integrated do not appropriately influence the agent's behavior, and (4) behavior is limited by the capacity of the model. In this paper we explore an alternative paradigm in which we train a network to map a dataset of past experiences to optimal behavior. Specifically, we augment an RL agent with a retrieval process (parameterized as a neural network) that has direct access to a dataset of experiences. This dataset can come from the agent's past experiences, expert demonstrations, or any other relevant source. The retrieval process is trained to retrieve information from the dataset that may be useful in the current context, to help the agent achieve its goal faster and more efficiently. We integrate our method into two different RL agents: an offline DQN agent and an online R2D2 agent. In offline multi-task problems, we show that the retrieval-augmented DQN agent avoids task interference and learns faster than the baseline DQN agent. On Atari, we show that retrieval-augmented R2D2 learns significantly faster than the baseline R2D2 agent and achieves higher scores. We run extensive ablations to measure the contributions of the components of our proposed method.
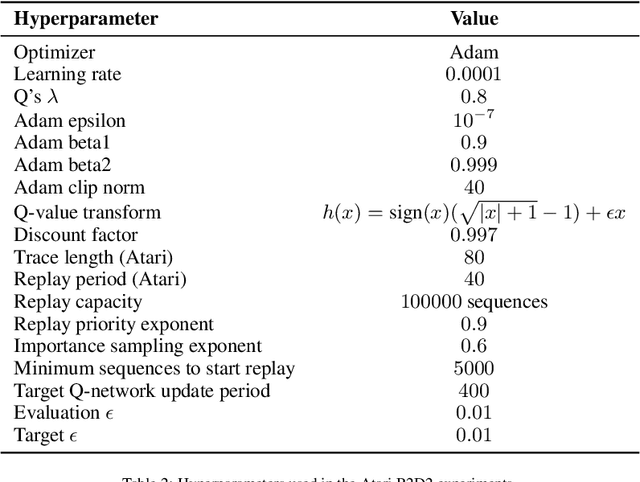
CoBERL: Contrastive BERT for Reinforcement Learning
Jul 12, 2021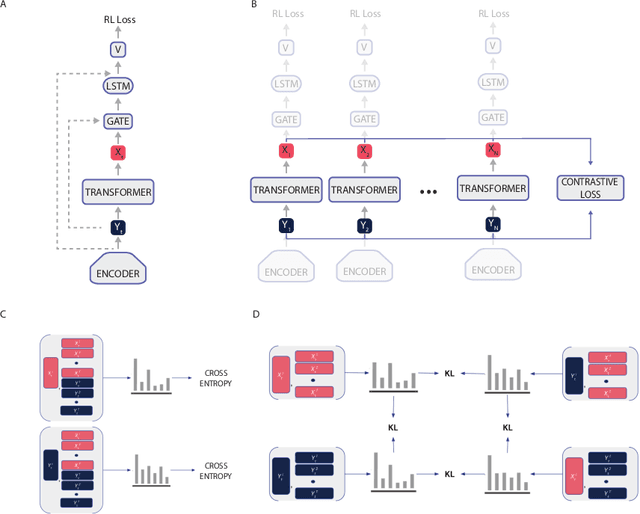

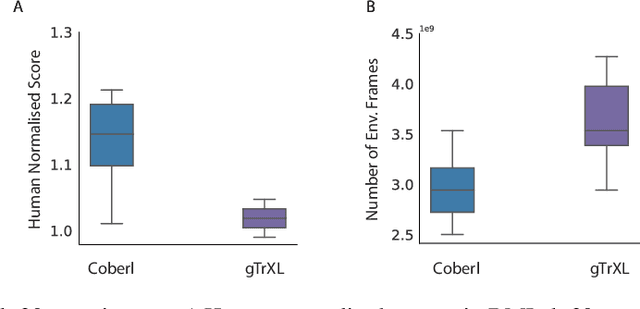
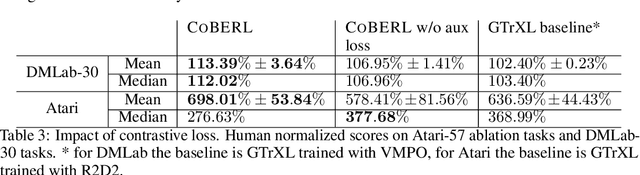
Many reinforcement learning (RL) agents require a large amount of experience to solve tasks. We propose Contrastive BERT for RL (CoBERL), an agent that combines a new contrastive loss and a hybrid LSTM-transformer architecture to tackle the challenge of improving data efficiency. CoBERL enables efficient, robust learning from pixels across a wide range of domains. We use bidirectional masked prediction in combination with a generalization of recent contrastive methods to learn better representations for transformers in RL, without the need of hand engineered data augmentations. We find that CoBERL consistently improves performance across the full Atari suite, a set of control tasks and a challenging 3D environment.
PonderNet: Learning to Ponder
Jul 12, 2021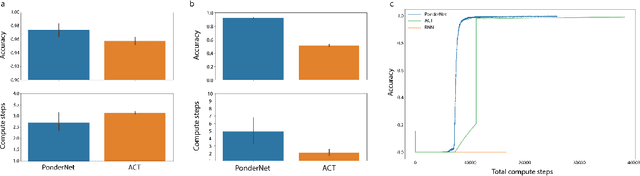

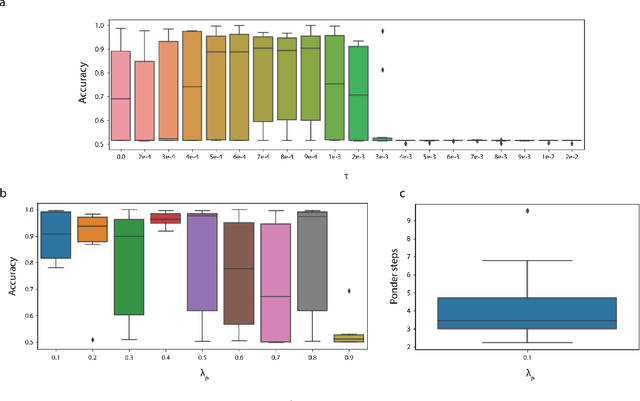

In standard neural networks the amount of computation used grows with the size of the inputs, but not with the complexity of the problem being learnt. To overcome this limitation we introduce PonderNet, a new algorithm that learns to adapt the amount of computation based on the complexity of the problem at hand. PonderNet learns end-to-end the number of computational steps to achieve an effective compromise between training prediction accuracy, computational cost and generalization. On a complex synthetic problem, PonderNet dramatically improves performance over previous adaptive computation methods and additionally succeeds at extrapolation tests where traditional neural networks fail. Also, our method matched the current state of the art results on a real world question and answering dataset, but using less compute. Finally, PonderNet reached state of the art results on a complex task designed to test the reasoning capabilities of neural networks.1
Towards mental time travel: a hierarchical memory for reinforcement learning agents
May 28, 2021

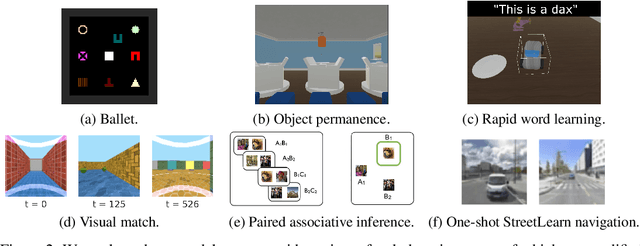

Reinforcement learning agents often forget details of the past, especially after delays or distractor tasks. Agents with common memory architectures struggle to recall and integrate across multiple timesteps of a past event, or even to recall the details of a single timestep that is followed by distractor tasks. To address these limitations, we propose a Hierarchical Transformer Memory (HTM), which helps agents to remember the past in detail. HTM stores memories by dividing the past into chunks, and recalls by first performing high-level attention over coarse summaries of the chunks, and then performing detailed attention within only the most relevant chunks. An agent with HTM can therefore "mentally time-travel" -- remember past events in detail without attending to all intervening events. We show that agents with HTM substantially outperform agents with other memory architectures at tasks requiring long-term recall, retention, or reasoning over memory. These include recalling where an object is hidden in a 3D environment, rapidly learning to navigate efficiently in a new neighborhood, and rapidly learning and retaining new object names. Agents with HTM can extrapolate to task sequences an order of magnitude longer than they were trained on, and can even generalize zero-shot from a meta-learning setting to maintaining knowledge across episodes. HTM improves agent sample efficiency, generalization, and generality (by solving tasks that previously required specialized architectures). Our work is a step towards agents that can learn, interact, and adapt in complex and temporally-extended environments.
MEMO: A Deep Network for Flexible Combination of Episodic Memories
Jan 29, 2020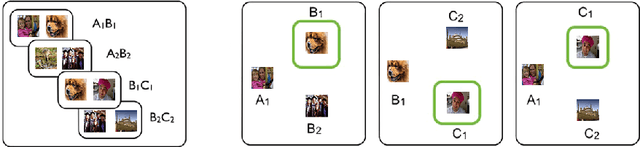
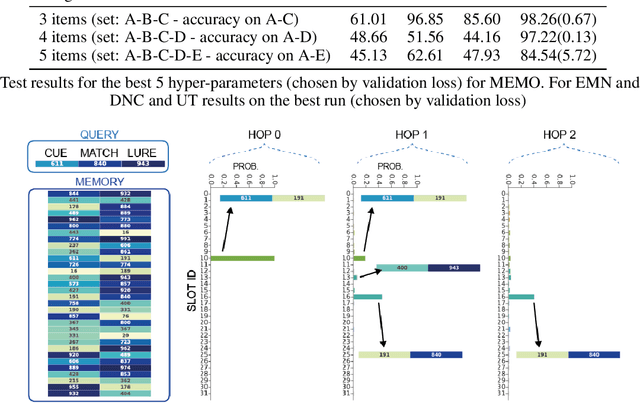
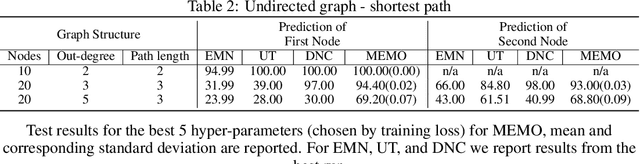

Recent research developing neural network architectures with external memory have often used the benchmark bAbI question and answering dataset which provides a challenging number of tasks requiring reasoning. Here we employed a classic associative inference task from the memory-based reasoning neuroscience literature in order to more carefully probe the reasoning capacity of existing memory-augmented architectures. This task is thought to capture the essence of reasoning -- the appreciation of distant relationships among elements distributed across multiple facts or memories. Surprisingly, we found that current architectures struggle to reason over long distance associations. Similar results were obtained on a more complex task involving finding the shortest path between nodes in a path. We therefore developed MEMO, an architecture endowed with the capacity to reason over longer distances. This was accomplished with the addition of two novel components. First, it introduces a separation between memories (facts) stored in external memory and the items that comprise these facts in external memory. Second, it makes use of an adaptive retrieval mechanism, allowing a variable number of "memory hops" before the answer is produced. MEMO is capable of solving our novel reasoning tasks, as well as match state of the art results in bAbI.