 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Retrieval for Reinforcement Learning
Jun 10, 2022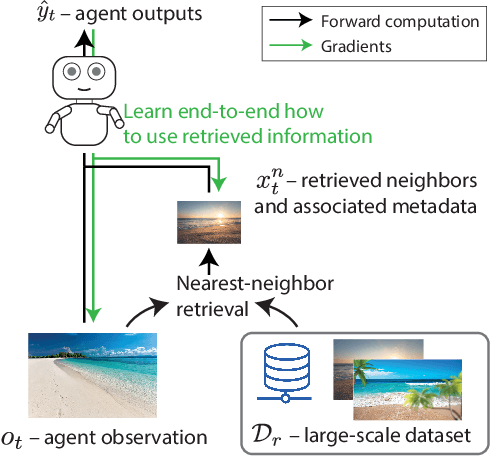
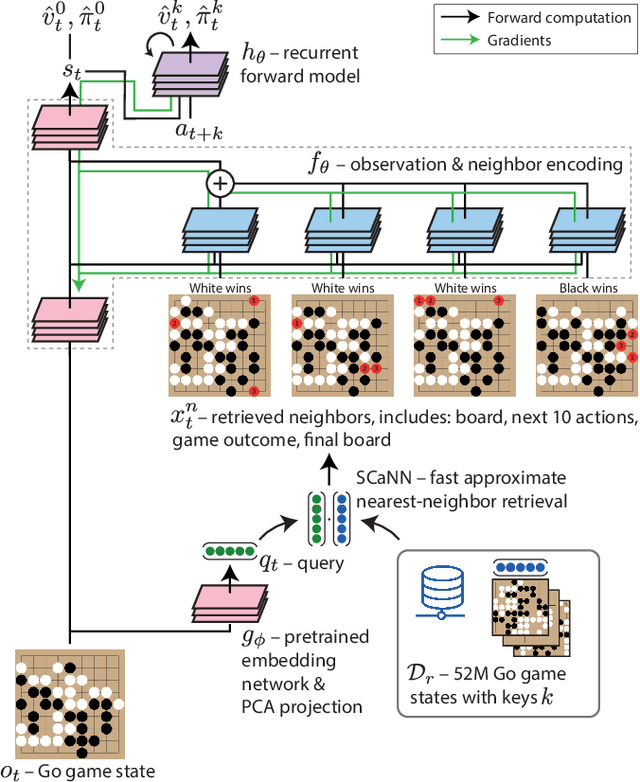
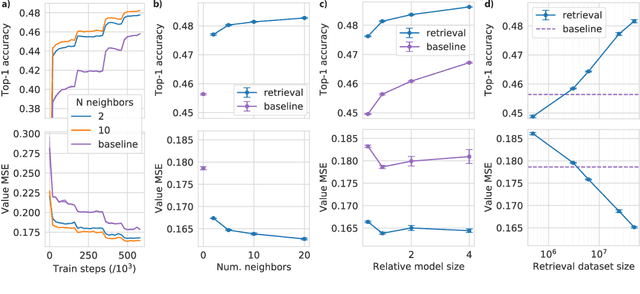
Effective decision making involves flexibly relating past experiences and relevant contextual information to a novel situation. In deep reinforcement learning, the dominant paradigm is for an agent to amortise information that helps decision-making into its network weights via gradient descent on training losses. Here, we pursue an alternative approach in which agents can utilise large-scale context-sensitive database lookups to support their parametric computations. This allows agents to directly learn in an end-to-end manner to utilise relevant information to inform their outputs. In addition, new information can be attended to by the agent, without retraining, by simply augmenting the retrieval dataset. We study this approach in Go, a challenging game for which the vast combinatorial state space privileges generalisation over direct matching to past experiences. We leverage fast, approximate nearest neighbor techniques in order to retrieve relevant data from a set of tens of millions of expert demonstration states. Attending to this information provides a significant boost to prediction accuracy and game-play performance over simply using these demonstrations as training trajectories, providing a compelling demonstration of the value of large-scale retrieval in reinforcement learning agents.
Retrieval-Augmented Reinforcement Learning
Mar 09, 2022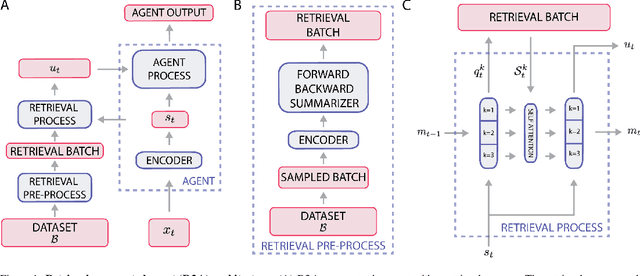
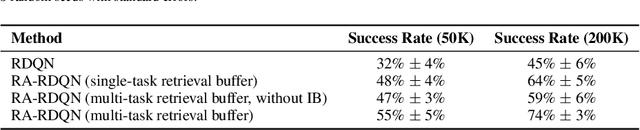
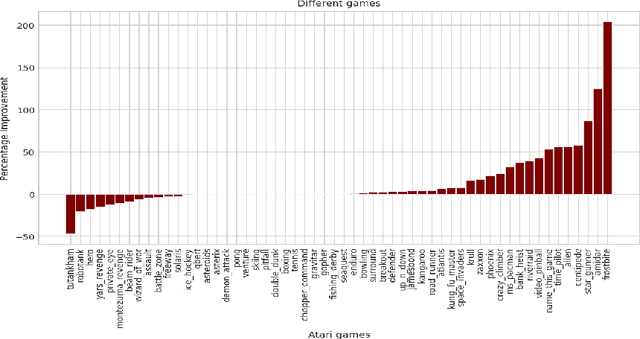
Most deep reinforcement learning (RL) algorithms distill experience into parametric behavior policies or value functions via gradient updates. While effective, this approach has several disadvantages: (1) it is computationally expensive, (2) it can take many updates to integrate experiences into the parametric model, (3) experiences that are not fully integrated do not appropriately influence the agent's behavior, and (4) behavior is limited by the capacity of the model. In this paper we explore an alternative paradigm in which we train a network to map a dataset of past experiences to optimal behavior. Specifically, we augment an RL agent with a retrieval process (parameterized as a neural network) that has direct access to a dataset of experiences. This dataset can come from the agent's past experiences, expert demonstrations, or any other relevant source. The retrieval process is trained to retrieve information from the dataset that may be useful in the current context, to help the agent achieve its goal faster and more efficiently. We integrate our method into two different RL agents: an offline DQN agent and an online R2D2 agent. In offline multi-task problems, we show that the retrieval-augmented DQN agent avoids task interference and learns faster than the baseline DQN agent. On Atari, we show that retrieval-augmented R2D2 learns significantly faster than the baseline R2D2 agent and achieves higher scores. We run extensive ablations to measure the contributions of the components of our proposed method.
Deep Learning without Weight Transport
May 31, 2019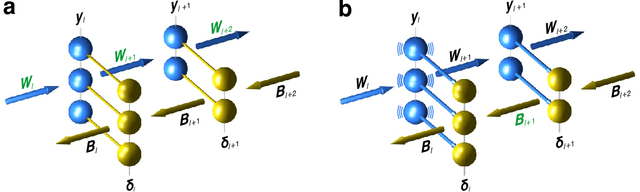
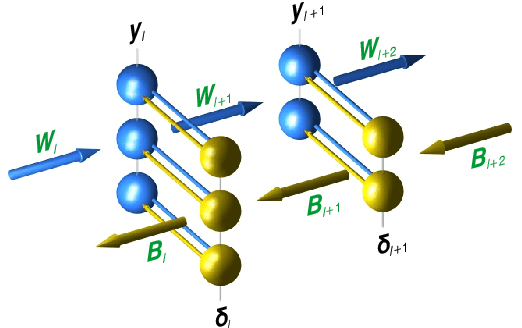
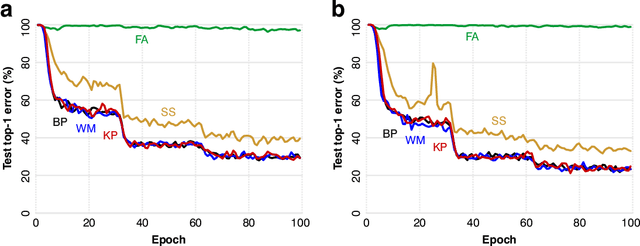
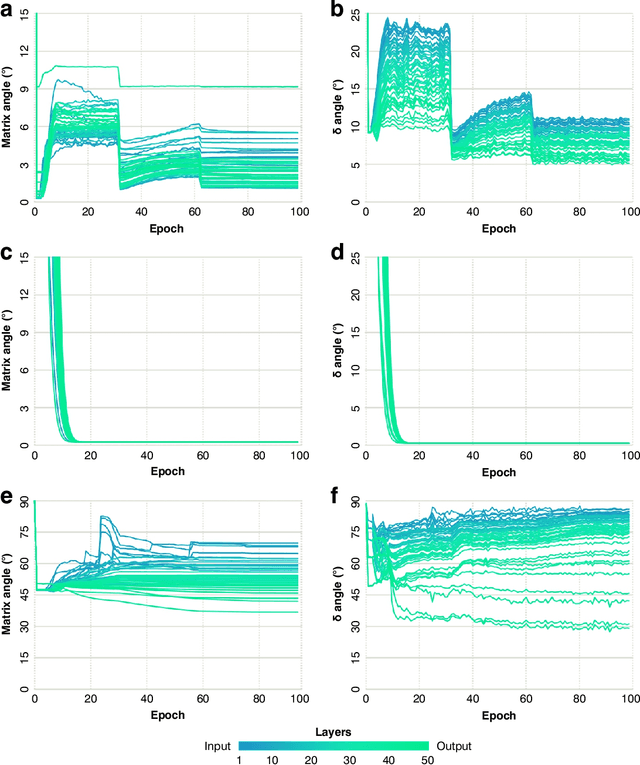
Current algorithms for deep learning probably cannot run in the brain because they rely on weight transport, where forward-path neurons transmit their synaptic weights to a feedback path, in a way that is likely impossible biologically. An algorithm called feedback alignment achieves deep learning without weight transport by using random feedback weights, but it performs poorly on hard visual-recognition tasks. Here we describe two mechanisms - a neural circuit called a weight mirror and a modification of an algorithm proposed by Kolen and Pollack in 1994 - both of which let the feedback path learn appropriate synaptic weights quickly and accurately even in large networks, without weight transport or complex wiring.Tested on the ImageNet visual-recognition task, these mechanisms outperform both feedback alignment and the newer sign-symmetry method, and nearly match backprop, the standard algorithm of deep learning, which uses weight transport.