 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainability Via Causal Self-Talk
Nov 17, 2022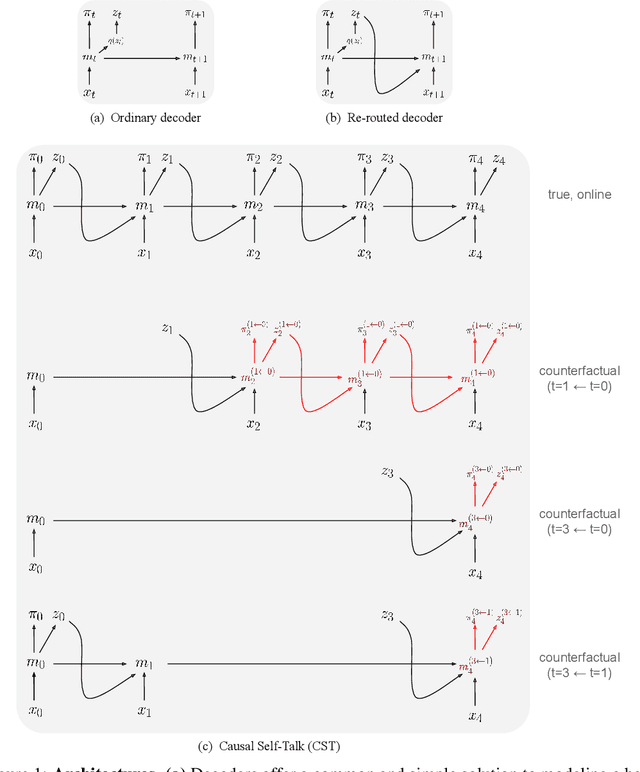



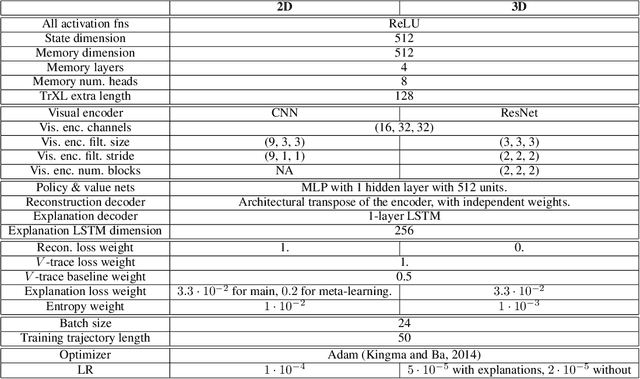
Explaining the behavior of AI systems is an important problem that, in practice, is generally avoided. While the XAI community has been developing an abundance of techniques, most incur a set of costs that the wider deep learning community has been unwilling to pay in most situations. We take a pragmatic view of the issue, and define a set of desiderata that capture both the ambitions of XAI and the practical constraints of deep learning. We describe an effective way to satisfy all the desiderata: train the AI system to build a causal model of itself. We develop an instance of this solution for Deep RL agents: Causal Self-Talk. CST operates by training the agent to communicate with itself across time. We implement this method in a simulated 3D environment, and show how it enables agents to generate faithful and semantically-meaningful explanations of their own behavior. Beyond explanations, we also demonstrate that these learned models provide new ways of building semantic control interfaces to AI systems.
Semantic Exploration from Language Abstractions and Pretrained Representations
Apr 08, 2022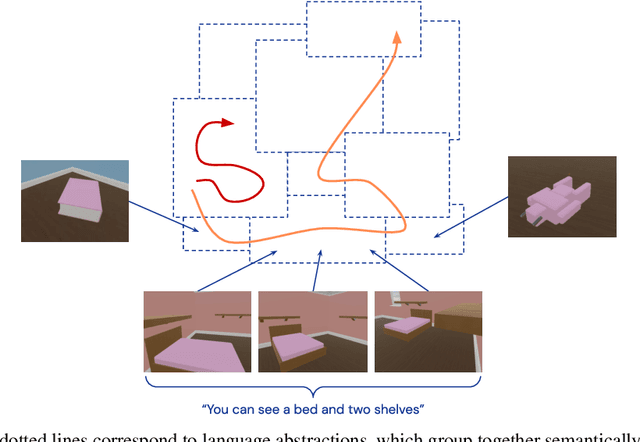
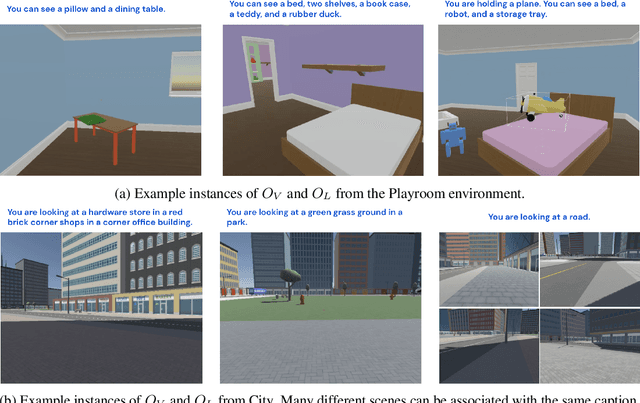
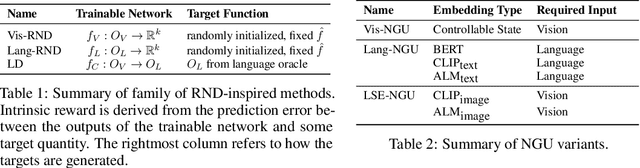
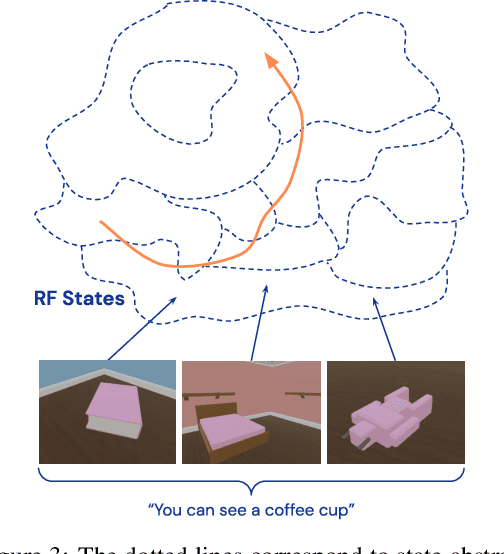
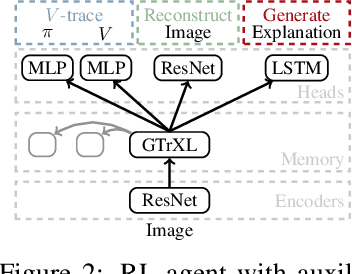
Continuous first-person 3D environments pose unique exploration challenges to reinforcement learning (RL) agents because of their high-dimensional state and action spaces. These challenges can be ameliorated by using semantically meaningful state abstractions to define novelty for exploration. We propose that learned representations shaped by natural language provide exactly this form of abstraction. In particular, we show that vision-language representations, when pretrained on image captioning datasets sampled from the internet, can drive meaningful, task-relevant exploration and improve performance on 3D simulated environments. We also characterize why and how language provides useful abstractions for exploration by comparing the impacts of using representations from a pretrained model, a language oracle, and several ablations. We demonstrate the benefits of our approach in two very different task domains -- one that stresses the identification and manipulation of everyday objects, and one that requires navigational exploration in an expansive world -- as well as two popular deep RL algorithms: Impala and R2D2. Our results suggest that using language-shaped representations could improve exploration for various algorithms and agents in challenging environments.
Tell me why! -- Explanations support learning of relational and causal structure
Dec 08, 2021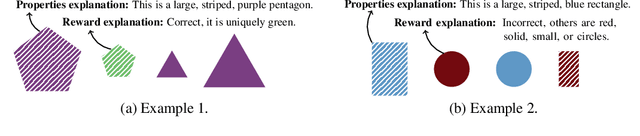
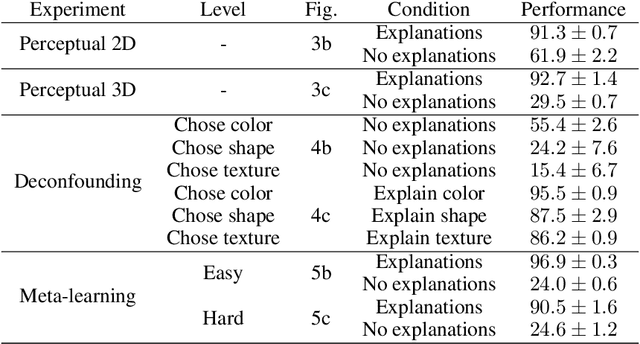
Explanations play a considerable role in human learning, especially in areas that remain major challenges for AI -- forming abstractions, and learning about the relational and causal structure of the world. Here, we explore whether reinforcement learning agents might likewise benefit from explanations. We outline a family of relational tasks that involve selecting an object that is the odd one out in a set (i.e., unique along one of many possible feature dimensions). Odd-one-out tasks require agents to reason over multi-dimensional relationships among a set of objects. We show that agents do not learn these tasks well from reward alone, but achieve >90% performance when they are also trained to generate language explaining object properties or why a choice is correct or incorrect. In further experiments, we show how predicting explanations enables agents to generalize appropriately from ambiguous, causally-confounded training, and even to meta-learn to perform experimental interventions to identify causal structure. We show that explanations help overcome the tendency of agents to fixate on simple features, and explore which aspects of explanations make them most beneficial. Our results suggest that learning from explanations is a powerful principle that could offer a promising path towards training more robust and general machine learning systems.