 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDungeons and Data: A Large-Scale NetHack Dataset
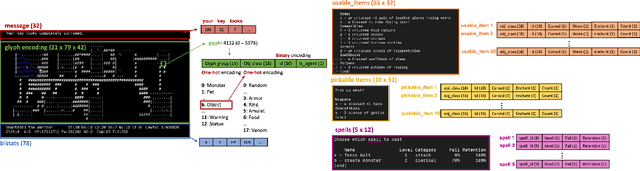
Nov 22, 2022Recent breakthroughs in the development of agents to solve challenging sequential decision making problems such as Go, StarCraft, or DOTA, have relied on both simulated environments and large-scale datasets. However, progress on this research has been hindered by the scarcity of open-sourced datasets and the prohibitive computational cost to work with them. Here we present the NetHack Learning Dataset (NLD), a large and highly-scalable dataset of trajectories from the popular game of NetHack, which is both extremely challenging for current methods and very fast to run. NLD consists of three parts: 10 billion state transitions from 1.5 million human trajectories collected on the NAO public NetHack server from 2009 to 2020; 3 billion state-action-score transitions from 100,000 trajectories collected from the symbolic bot winner of the NetHack Challenge 2021; and, accompanying code for users to record, load and stream any collection of such trajectories in a highly compressed form. We evaluate a wide range of existing algorithms including online and offline RL, as well as learning from demonstrations, showing that significant research advances are needed to fully leverage large-scale datasets for challenging sequential decision making tasks.
Grounding Aleatoric Uncertainty in Unsupervised Environment Design
Jul 11, 2022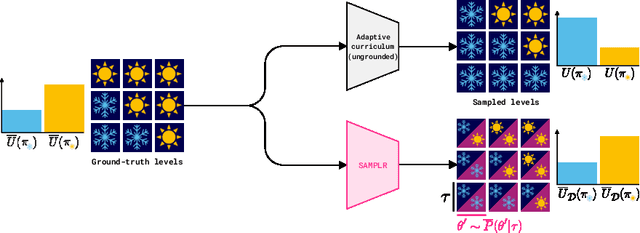
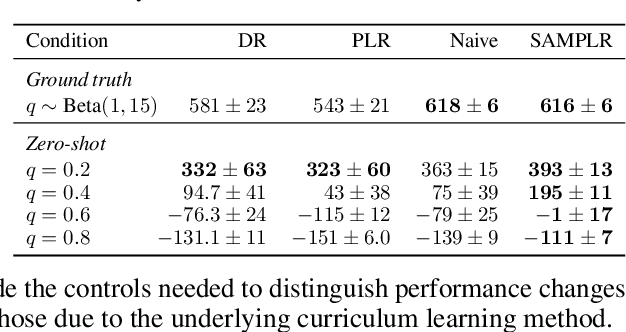
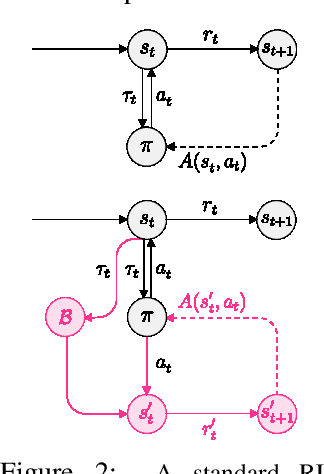
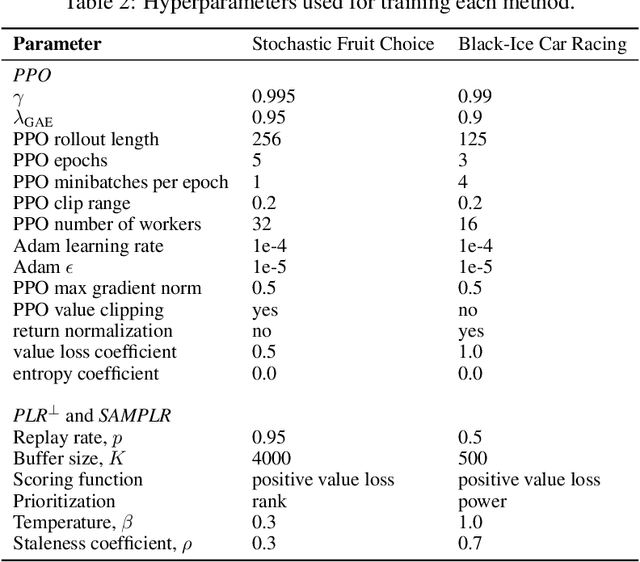
Adaptive curricula in reinforcement learning (RL) have proven effective for producing policies robust to discrepancies between the train and test environment. Recently, the Unsupervised Environment Design (UED) framework generalized RL curricula to generating sequences of entire environments, leading to new methods with robust minimax regret properties. Problematically, in partially-observable or stochastic settings, optimal policies may depend on the ground-truth distribution over aleatoric parameters of the environment in the intended deployment setting, while curriculum learning necessarily shifts the training distribution. We formalize this phenomenon as curriculum-induced covariate shift (CICS), and describe how its occurrence in aleatoric parameters can lead to suboptimal policies. Directly sampling these parameters from the ground-truth distribution avoids the issue, but thwarts curriculum learning. We propose SAMPLR, a minimax regret UED method that optimizes the ground-truth utility function, even when the underlying training data is biased due to CICS. We prove, and validate on challenging domains, that our approach preserves optimality under the ground-truth distribution, while promoting robustness across the full range of environment settings.
Insights From the NeurIPS 2021 NetHack Challenge
Mar 22, 2022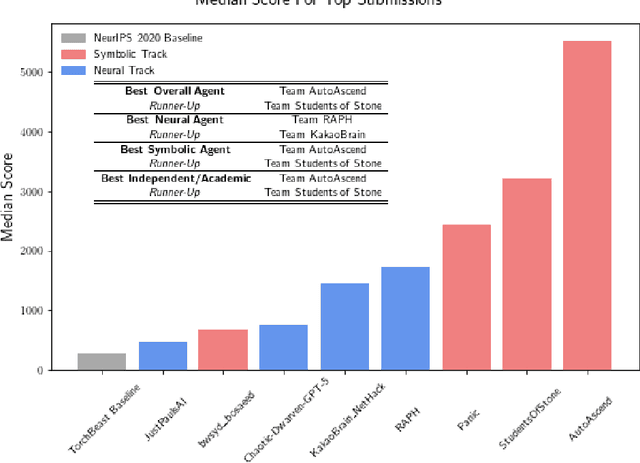

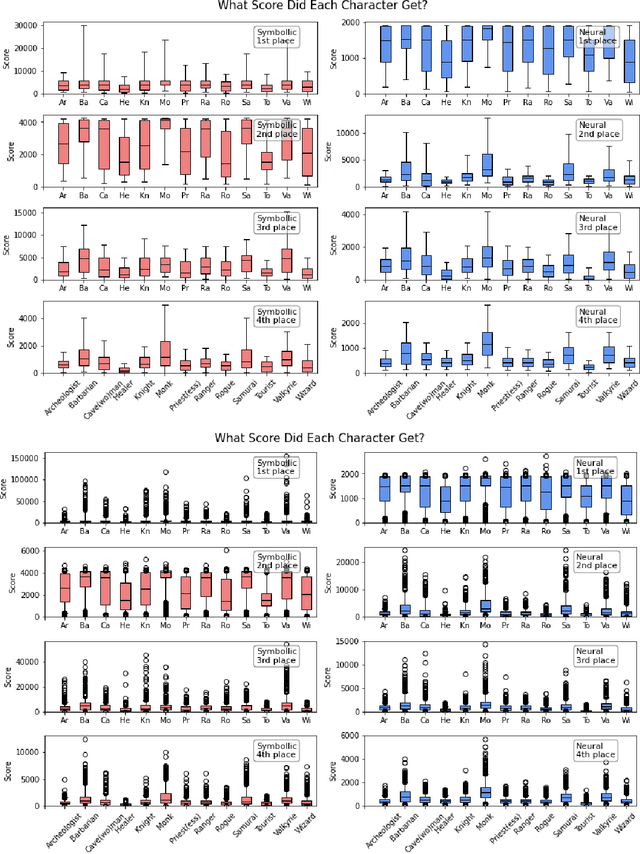
In this report, we summarize the takeaways from the first NeurIPS 2021 NetHack Challenge. Participants were tasked with developing a program or agent that can win (i.e., 'ascend' in) the popular dungeon-crawler game of NetHack by interacting with the NetHack Learning Environment (NLE), a scalable, procedurally generated, and challenging Gym environment for reinforcement learning (RL). The challenge showcased community-driven progress in AI with many diverse approaches significantly beating the previously best results on NetHack. Furthermore, it served as a direct comparison between neural (e.g., deep RL) and symbolic AI, as well as hybrid systems, demonstrating that on NetHack symbolic bots currently outperform deep RL by a large margin. Lastly, no agent got close to winning the game, illustrating NetHack's suitability as a long-term benchmark for AI research.
MiniHack the Planet: A Sandbox for Open-Ended Reinforcement Learning Research
Sep 27, 2021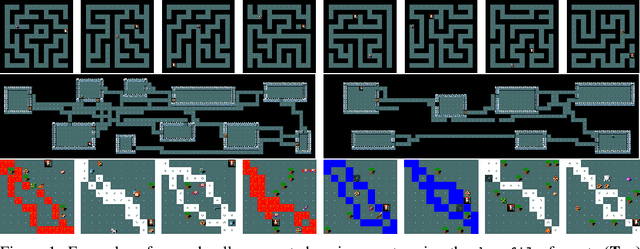
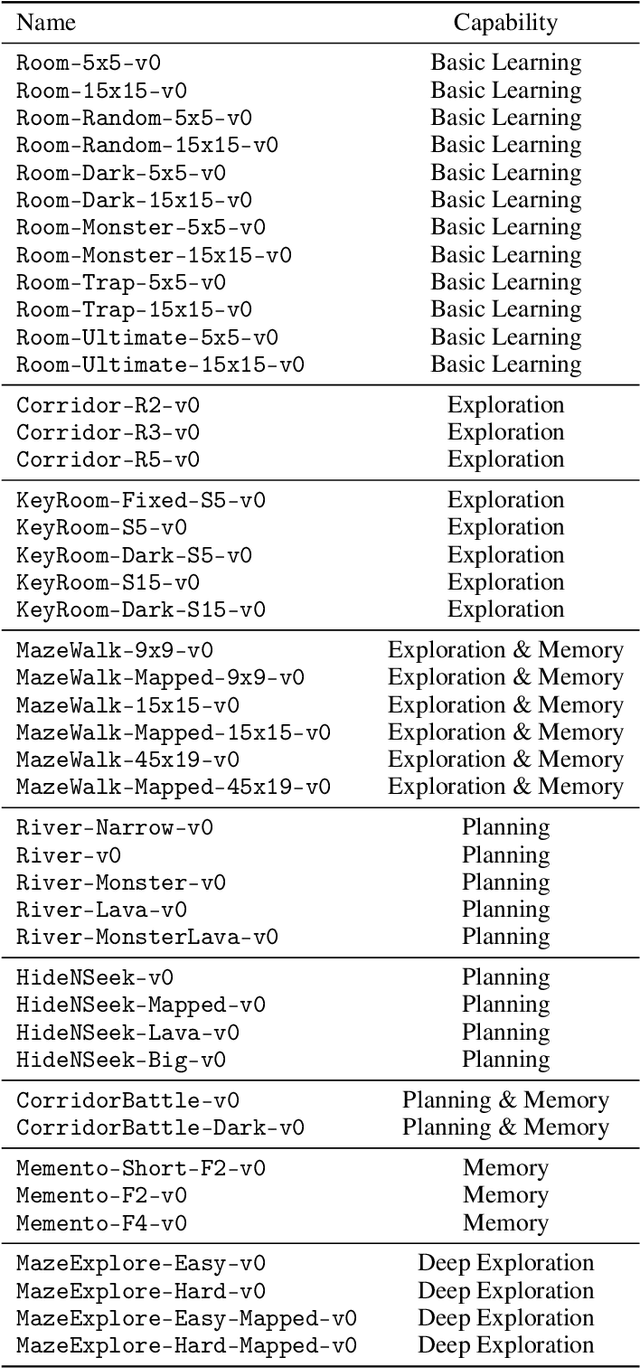
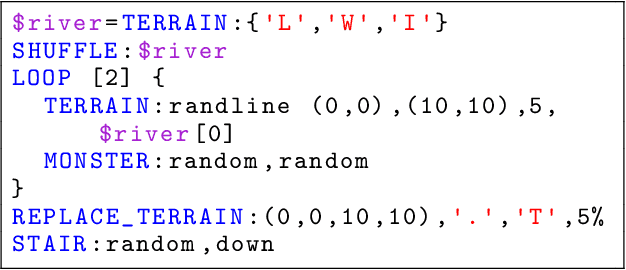
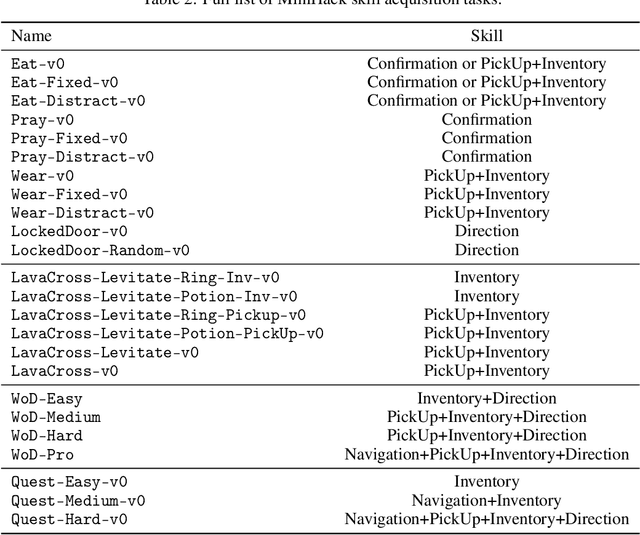
The progress in deep reinforcement learning (RL) is heavily driven by the availability of challenging benchmarks used for training agents. However, benchmarks that are widely adopted by the community are not explicitly designed for evaluating specific capabilities of RL methods. While there exist environments for assessing particular open problems in RL (such as exploration, transfer learning, unsupervised environment design, or even language-assisted RL), it is generally difficult to extend these to richer, more complex environments once research goes beyond proof-of-concept results. We present MiniHack, a powerful sandbox framework for easily designing novel RL environments. MiniHack is a one-stop shop for RL experiments with environments ranging from small rooms to complex, procedurally generated worlds. By leveraging the full set of entities and environment dynamics from NetHack, one of the richest grid-based video games, MiniHack allows designing custom RL testbeds that are fast and convenient to use. With this sandbox framework, novel environments can be designed easily, either using a human-readable description language or a simple Python interface. In addition to a variety of RL tasks and baselines, MiniHack can wrap existing RL benchmarks and provide ways to seamlessly add additional complexity.
PAQ: 65 Million Probably-Asked Questions and What You Can Do With Them
Feb 13, 2021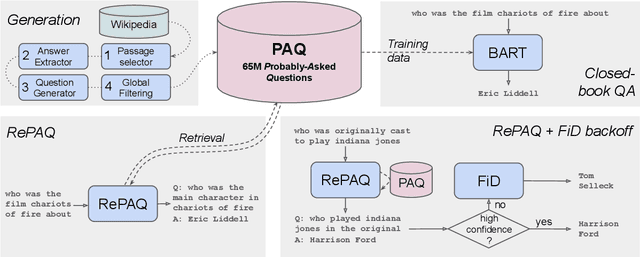
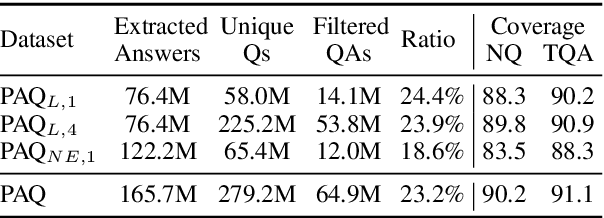
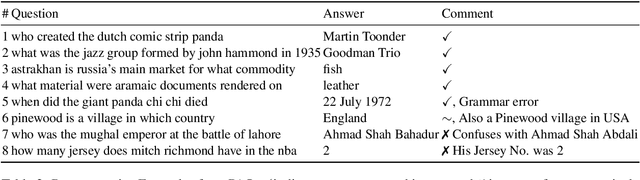
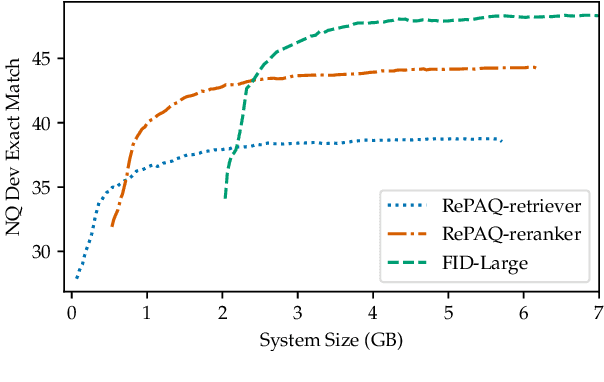
Open-domain Question Answering models which directly leverage question-answer (QA) pairs, such as closed-book QA (CBQA) models and QA-pair retrievers, show promise in terms of speed and memory compared to conventional models which retrieve and read from text corpora. QA-pair retrievers also offer interpretable answers, a high degree of control, and are trivial to update at test time with new knowledge. However, these models lack the accuracy of retrieve-and-read systems, as substantially less knowledge is covered by the available QA-pairs relative to text corpora like Wikipedia. To facilitate improved QA-pair models, we introduce Probably Asked Questions (PAQ), a very large resource of 65M automatically-generated QA-pairs. We introduce a new QA-pair retriever, RePAQ, to complement PAQ. We find that PAQ preempts and caches test questions, enabling RePAQ to match the accuracy of recent retrieve-and-read models, whilst being significantly faster. Using PAQ, we train CBQA models which outperform comparable baselines by 5%, but trail RePAQ by over 15%, indicating the effectiveness of explicit retrieval. RePAQ can be configured for size (under 500MB) or speed (over 1K questions per second) whilst retaining high accuracy. Lastly, we demonstrate RePAQ's strength at selective QA, abstaining from answering when it is likely to be incorrect. This enables RePAQ to ``back-off" to a more expensive state-of-the-art model, leading to a combined system which is both more accurate and 2x faster than the state-of-the-art model alone.
NeurIPS 2020 EfficientQA Competition: Systems, Analyses and Lessons Learned
Jan 01, 2021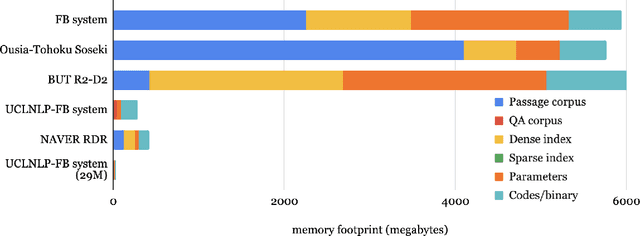
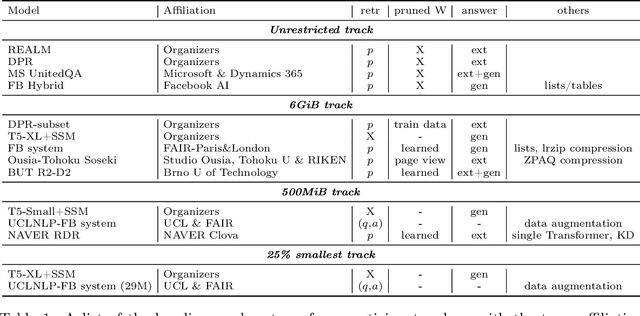
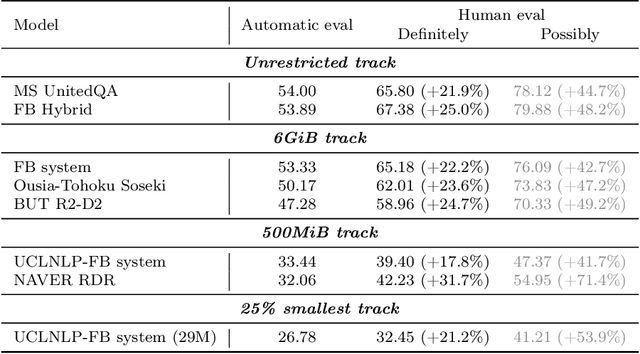
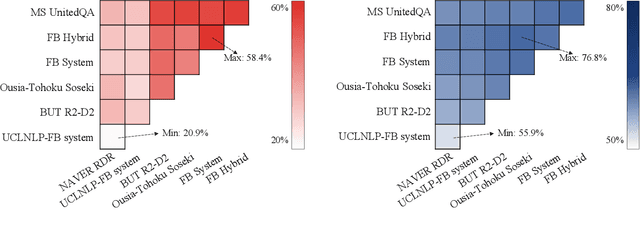
We review the EfficientQA competition from NeurIPS 2020. The competition focused on open-domain question answering (QA), where systems take natural language questions as input and return natural language answers. The aim of the competition was to build systems that can predict correct answers while also satisfying strict on-disk memory budgets. These memory budgets were designed to encourage contestants to explore the trade-off between storing large, redundant, retrieval corpora or the parameters of large learned models. In this report, we describe the motivation and organization of the competition, review the best submissions, and analyze system predictions to inform a discussion of evaluation for open-domain QA.
The NetHack Learning Environment
Jun 24, 2020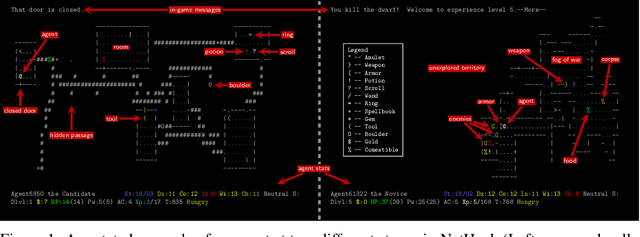
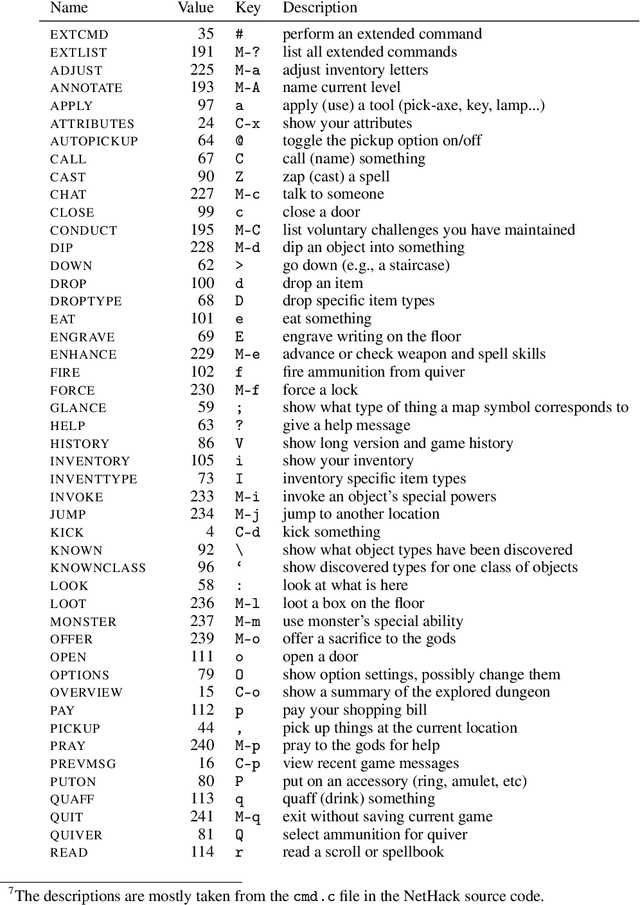
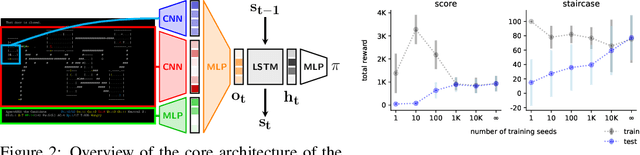
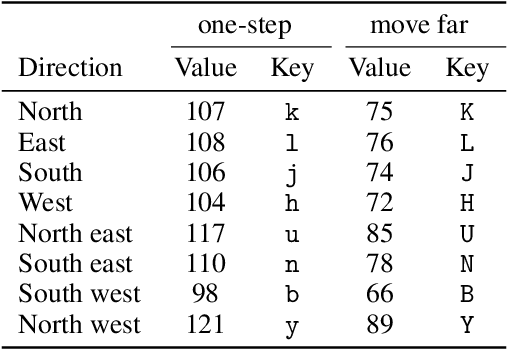
Progress in Reinforcement Learning (RL) algorithms goes hand-in-hand with the development of challenging environments that test the limits of current methods. While existing RL environments are either sufficiently complex or based on fast simulation, they are rarely both. Here, we present the NetHack Learning Environment (NLE), a scalable, procedurally generated, stochastic, rich, and challenging environment for RL research based on the popular single-player terminal-based roguelike game, NetHack. We argue that NetHack is sufficiently complex to drive long-term research on problems such as exploration, planning, skill acquisition, and language-conditioned RL, while dramatically reducing the computational resources required to gather a large amount of experience. We compare NLE and its task suite to existing alternatives, and discuss why it is an ideal medium for testing the robustness and systematic generalization of RL agents. We demonstrate empirical success for early stages of the game using a distributed Deep RL baseline and Random Network Distillation exploration, alongside qualitative analysis of various agents trained in the environment. NLE is open source at https://github.com/facebookresearch/nle.
Learning with AMIGo: Adversarially Motivated Intrinsic Goals
Jun 22, 2020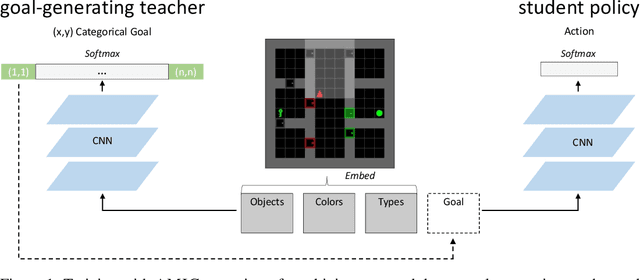
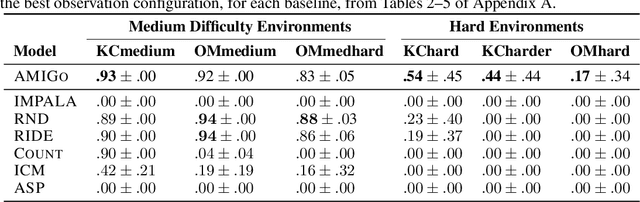
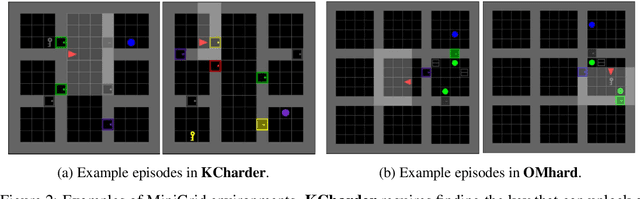
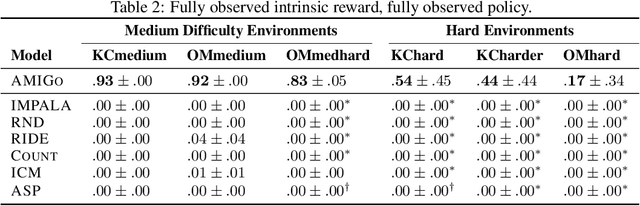
A key challenge for reinforcement learning (RL) consists of learning in environments with sparse extrinsic rewards. In contrast to current RL methods, humans are able to learn new skills with little or no reward by using various forms of intrinsic motivation. We propose AMIGo, a novel agent incorporating a goal-generating teacher that proposes Adversarially Motivated Intrinsic Goals to train a goal-conditioned "student" policy in the absence of (or alongside) environment reward. Specifically, through a simple but effective "constructively adversarial" objective, the teacher learns to propose increasingly challenging---yet achievable---goals that allow the student to learn general skills for acting in a new environment, independent of the task to be solved. We show that our method generates a natural curriculum of self-proposed goals which ultimately allows the agent to solve challenging procedurally-generated tasks where other forms of intrinsic motivation and state-of-the-art RL methods fail.
Retrieval-Augmented Generation for Knowledge-Intensive NLP Tasks
May 22, 2020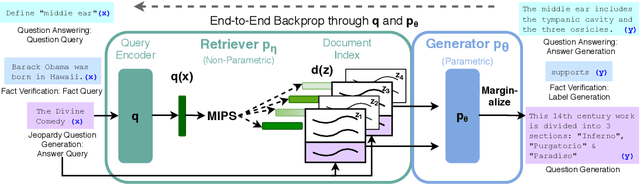
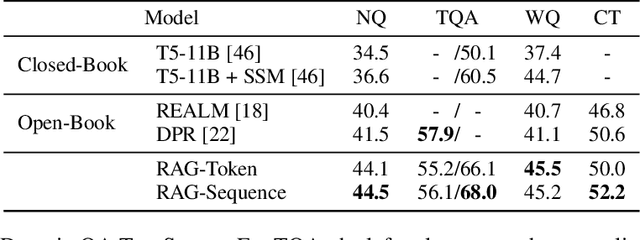
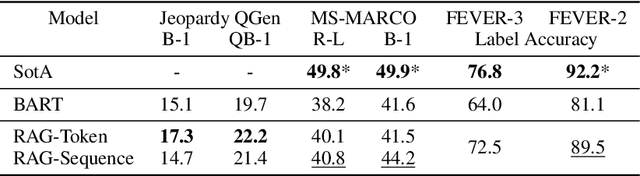

Large pre-trained language models have been shown to store factual knowledge in their parameters, and achieve state-of-the-art results when fine-tuned on downstream NLP tasks. However, their ability to access and precisely manipulate knowledge is still limited, and hence on knowledge-intensive tasks, their performance lags behind task-specific architectures. Additionally, providing provenance for their decisions and updating their world knowledge remain open research problems. Pre-trained models with a differentiable access mechanism to explicit non-parametric memory can overcome this issue, but have so far been only investigated for extractive downstream tasks. We explore a general-purpose fine-tuning recipe for retrieval-augmented generation (RAG) -- models which combine pre-trained parametric and non-parametric memory for language generation. We introduce RAG models where the parametric memory is a pre-trained seq2seq model and the non-parametric memory is a dense vector index of Wikipedia, accessed with a pre-trained neural retriever. We compare two RAG formulations, one which conditions on the same retrieved passages across the whole generated sequence, the other can use different passages per token. We fine-tune and evaluate our models on a wide range of knowledge-intensive NLP tasks and set the state-of-the-art on three open domain QA tasks, outperforming parametric seq2seq models and task-specific retrieve-and-extract architectures. For language generation tasks, we find that RAG models generate more specific, diverse and factual language than a state-of-the-art parametric-only seq2seq baseline.
MVFST-RL: An Asynchronous RL Framework for Congestion Control with Delayed Actions
Oct 30, 2019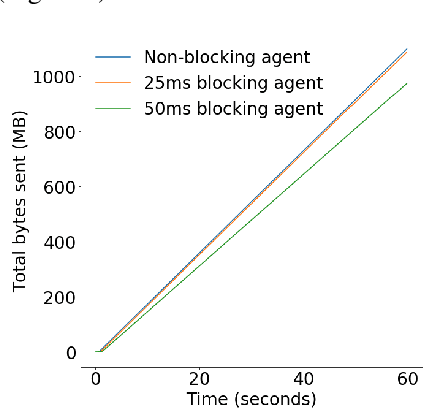
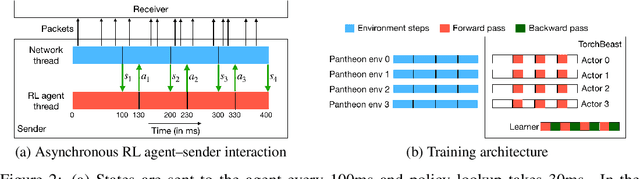
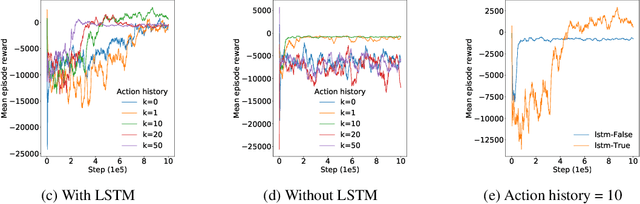
Effective network congestion control strategies are key to keeping the Internet (or any large computer network) operational. Network congestion control has been dominated by hand-crafted heuristics for decades. Recently, ReinforcementLearning (RL) has emerged as an alternative to automatically optimize such control strategies. Research so far has primarily considered RL interfaces which block the sender while an agent considers its next action. This is largely an artifact of building on top of frameworks designed for RL in games (e.g. OpenAI Gym). However, this does not translate to real-world networking environments, where a network sender waiting on a policy without sending data leads to under-utilization of bandwidth. We instead propose to formulate congestion control with an asynchronous RL agent that handles delayed actions. We present MVFST-RL, a scalable framework for congestion control in the QUIC transport protocol that leverages state-of-the-art in asynchronous RL training with off-policy correction. We analyze modeling improvements to mitigate the deviation from Markovian dynamics, and evaluate our method on emulated networks from the Pantheon benchmark platform. The source code is publicly available at https://github.com/facebookresearch/mvfst-rl.