 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Flamingo: a Visual Language Model for Few-Shot Learning
Apr 29, 2022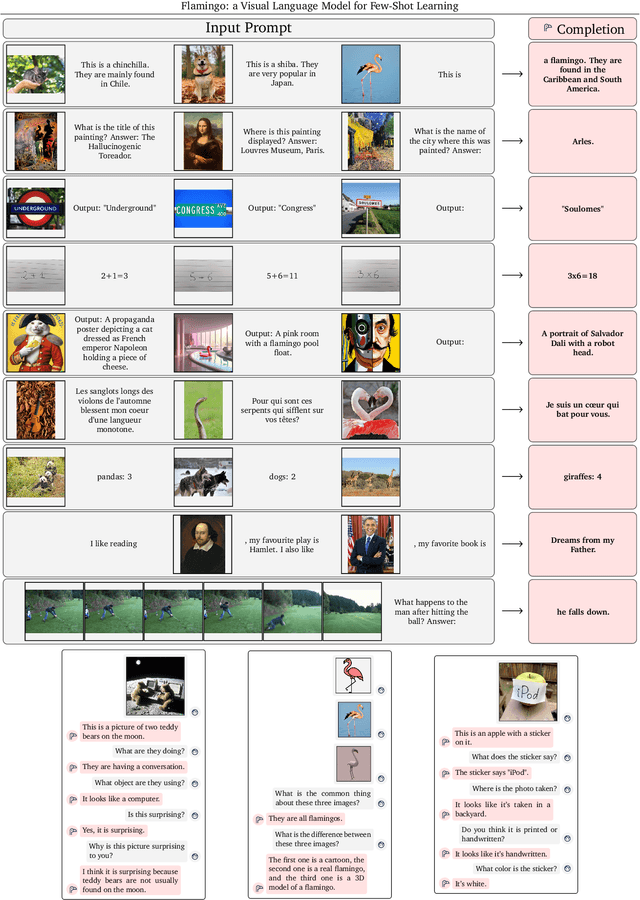
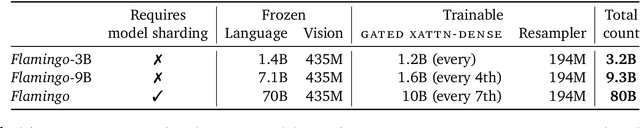
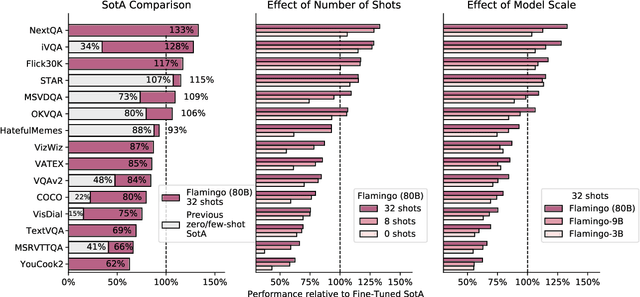
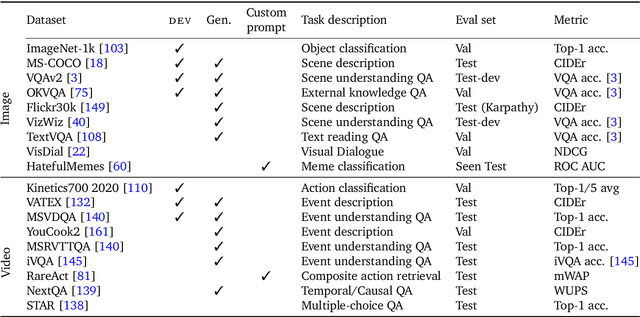
Building models that can be rapidly adapted to numerous tasks using only a handful of annotated examples is an open challenge for multimodal machine learning research. We introduce Flamingo, a family of Visual Language Models (VLM) with this ability. Flamingo models include key architectural innovations to: (i) bridge powerful pretrained vision-only and language-only models, (ii) handle sequences of arbitrarily interleaved visual and textual data, and (iii) seamlessly ingest images or videos as inputs. Thanks to their flexibility, Flamingo models can be trained on large-scale multimodal web corpora containing arbitrarily interleaved text and images, which is key to endow them with in-context few-shot learning capabilities. We perform a thorough evaluation of the proposed Flamingo models, exploring and measuring their ability to rapidly adapt to a variety of image and video understanding benchmarks. These include open-ended tasks such as visual question-answering, where the model is prompted with a question which it has to answer, captioning tasks, which evaluate the ability to describe a scene or an event, and close-ended tasks such as multiple choice visual question-answering. For tasks lying anywhere on this spectrum, we demonstrate that a single Flamingo model can achieve a new state of the art for few-shot learning, simply by prompting the model with task-specific examples. On many of these benchmarks, Flamingo actually surpasses the performance of models that are fine-tuned on thousands of times more task-specific data.
Alchemy: A structured task distribution for meta-reinforcement learning
Feb 04, 2021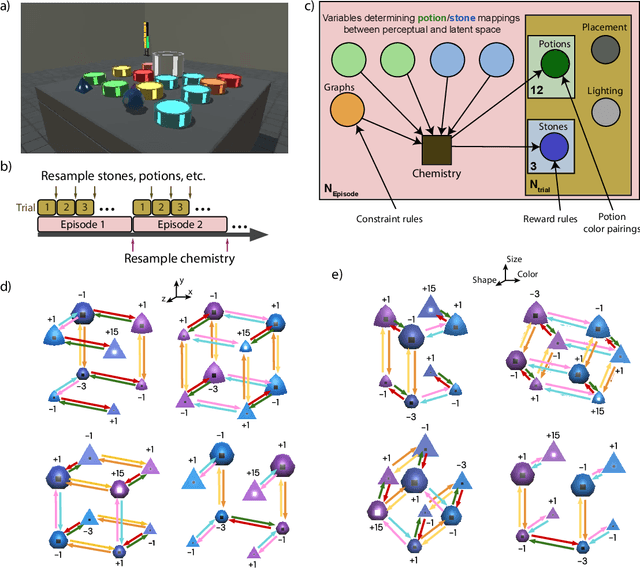
There has been rapidly growing interest in meta-learning as a method for increasing the flexibility and sample efficiency of reinforcement learning. One problem in this area of research, however, has been a scarcity of adequate benchmark tasks. In general, the structure underlying past benchmarks has either been too simple to be inherently interesting, or too ill-defined to support principled analysis. In the present work, we introduce a new benchmark for meta-RL research, which combines structural richness with structural transparency. Alchemy is a 3D video game, implemented in Unity, which involves a latent causal structure that is resampled procedurally from episode to episode, affording structure learning, online inference, hypothesis testing and action sequencing based on abstract domain knowledge. We evaluate a pair of powerful RL agents on Alchemy and present an in-depth analysis of one of these agents. Results clearly indicate a frank and specific failure of meta-learning, providing validation for Alchemy as a challenging benchmark for meta-RL. Concurrent with this report, we are releasing Alchemy as public resource, together with a suite of analysis tools and sample agent trajectories.
Representation Matters: Improving Perception and Exploration for Robotics
Nov 03, 2020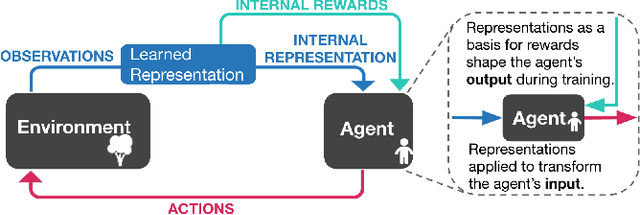
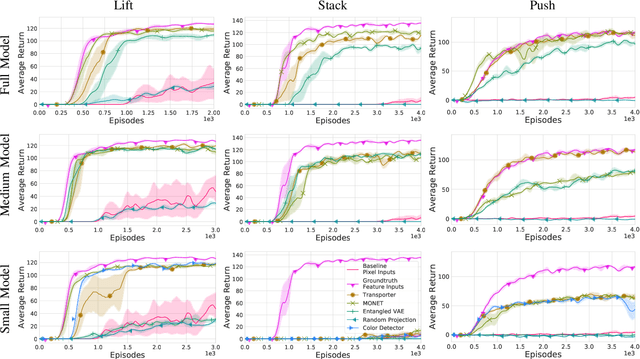
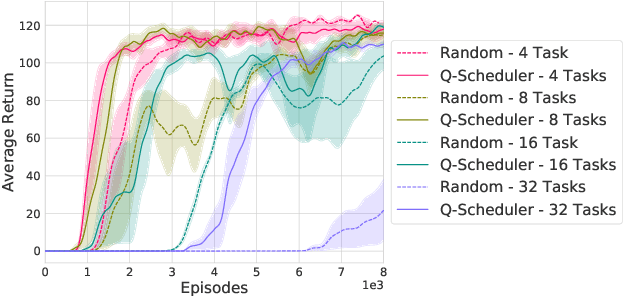
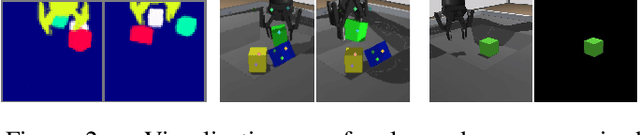
Projecting high-dimensional environment observations into lower-dimensional structured representations can considerably improve data-efficiency for reinforcement learning in domains with limited data such as robotics. Can a single generally useful representation be found? In order to answer this question, it is important to understand how the representation will be used by the agent and what properties such a 'good' representation should have. In this paper we systematically evaluate a number of common learnt and hand-engineered representations in the context of three robotics tasks: lifting, stacking and pushing of 3D blocks. The representations are evaluated in two use-cases: as input to the agent, or as a source of auxiliary tasks. Furthermore, the value of each representation is evaluated in terms of three properties: dimensionality, observability and disentanglement. We can significantly improve performance in both use-cases and demonstrate that some representations can perform commensurate to simulator states as agent inputs. Finally, our results challenge common intuitions by demonstrating that: 1) dimensionality strongly matters for task generation, but is negligible for inputs, 2) observability of task-relevant aspects mostly affects the input representation use-case, and 3) disentanglement leads to better auxiliary tasks, but has only limited benefits for input representations. This work serves as a step towards a more systematic understanding of what makes a 'good' representation for control in robotics, enabling practitioners to make more informed choices for developing new learned or hand-engineered representations.
AlignNet: Unsupervised Entity Alignment
Jul 21, 2020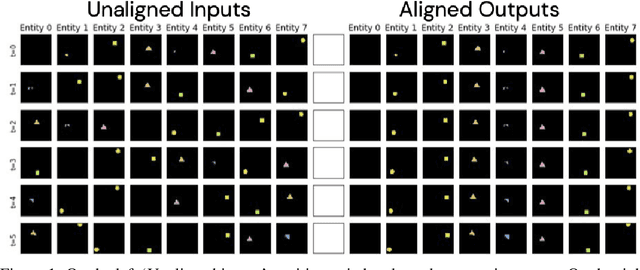

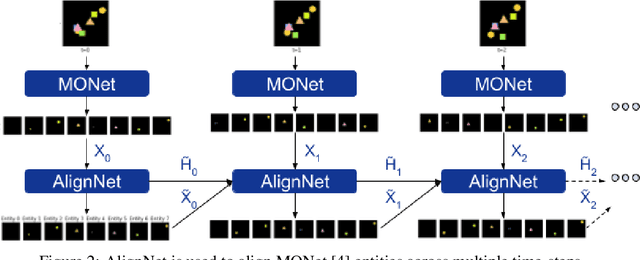
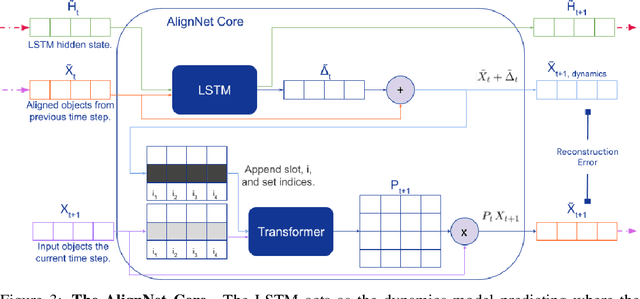
Recently developed deep learning models are able to learn to segment scenes into component objects without supervision. This opens many new and exciting avenues of research, allowing agents to take objects (or entities) as inputs, rather that pixels. Unfortunately, while these models provide excellent segmentation of a single frame, they do not keep track of how objects segmented at one time-step correspond (or align) to those at a later time-step. The alignment (or correspondence) problem has impeded progress towards using object representations in downstream tasks. In this paper we take steps towards solving the alignment problem, presenting the AlignNet, an unsupervised alignment module.
Unsupervised Learning of Object Keypoints for Perception and Control
Jun 19, 2019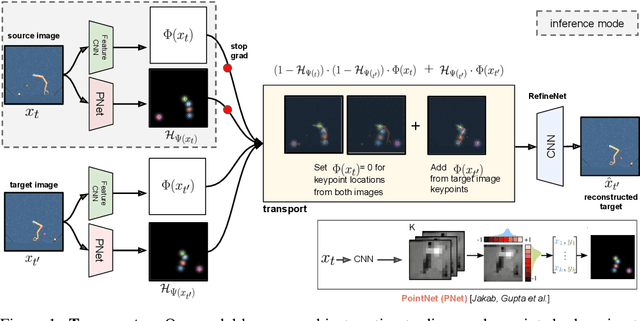
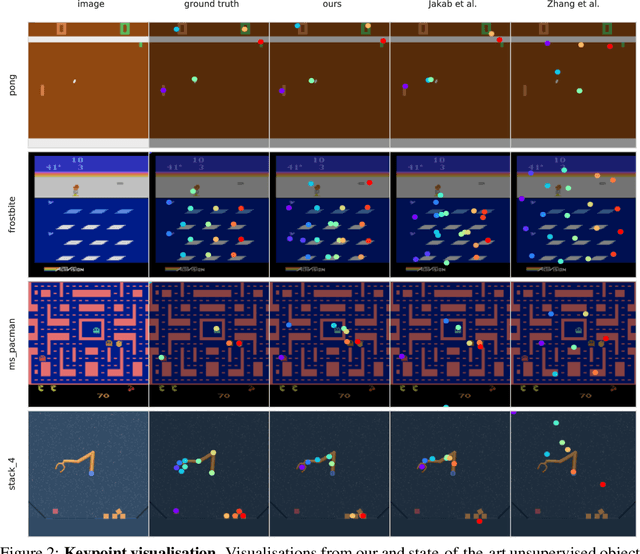
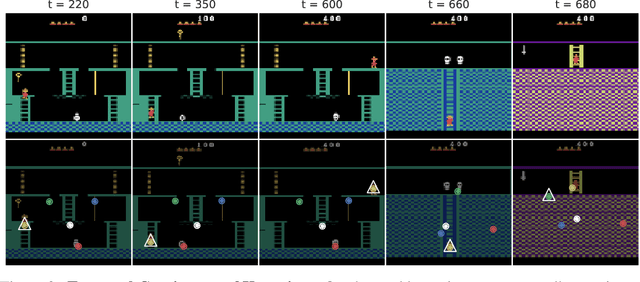
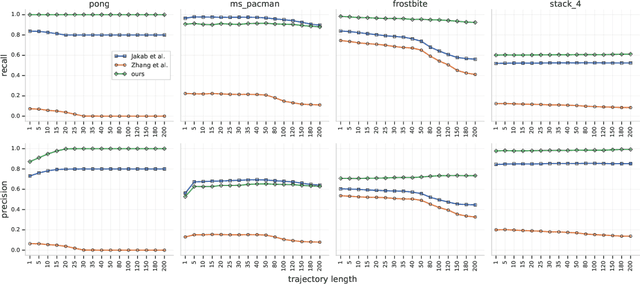
The study of object representations in computer vision has primarily focused on developing representations that are useful for image classification, object detection, or semantic segmentation as downstream tasks. In this work we aim to learn object representations that are useful for control and reinforcement learning (RL). To this end, we introduce Transporter, a neural network architecture for discovering concise geometric object representations in terms of keypoints or image-space coordinates. Our method learns from raw video frames in a fully unsupervised manner, by transporting learnt image features between video frames using a keypoint bottleneck. The discovered keypoints track objects and object parts across long time-horizons more accurately than recent similar methods. Furthermore, consistent long-term tracking enables two notable results in control domains -- (1) using the keypoint co-ordinates and corresponding image features as inputs enables highly sample-efficient reinforcement learning; (2) learning to explore by controlling keypoint locations drastically reduces the search space, enabling deep exploration (leading to states unreachable through random action exploration) without any extrinsic rewards.
Unsupervised Predictive Memory in a Goal-Directed Agent
Mar 28, 2018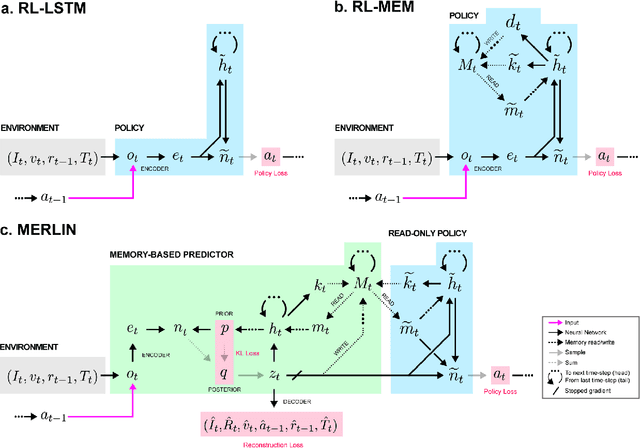
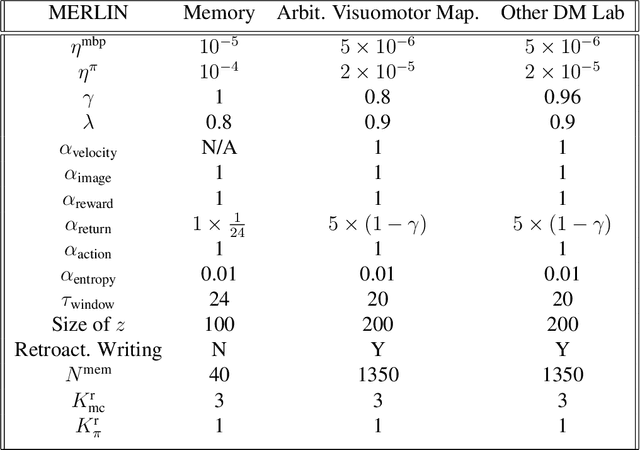
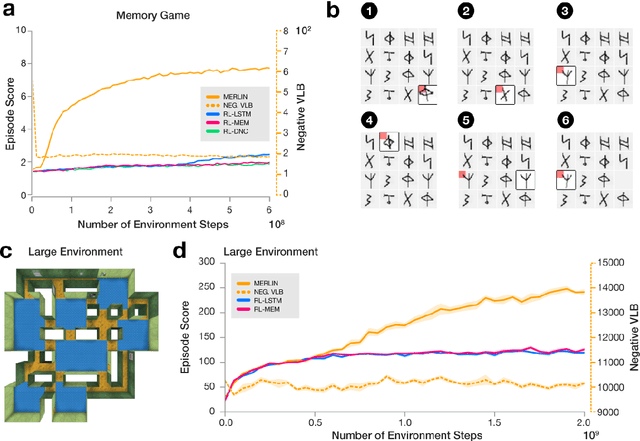
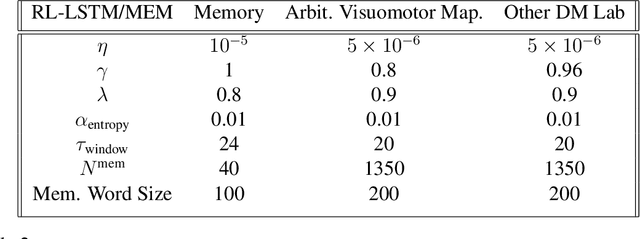
Animals execute goal-directed behaviours despite the limited range and scope of their sensors. To cope, they explore environments and store memories maintaining estimates of important information that is not presently available. Recently, progress has been made with artificial intelligence (AI) agents that learn to perform tasks from sensory input, even at a human level, by merging reinforcement learning (RL) algorithms with deep neural networks, and the excitement surrounding these results has led to the pursuit of related ideas as explanations of non-human animal learning. However, we demonstrate that contemporary RL algorithms struggle to solve simple tasks when enough information is concealed from the sensors of the agent, a property called "partial observability". An obvious requirement for handling partially observed tasks is access to extensive memory, but we show memory is not enough; it is critical that the right information be stored in the right format. We develop a model, the Memory, RL, and Inference Network (MERLIN), in which memory formation is guided by a process of predictive modeling. MERLIN facilitates the solution of tasks in 3D virtual reality environments for which partial observability is severe and memories must be maintained over long durations. Our model demonstrates a single learning agent architecture that can solve canonical behavioural tasks in psychology and neurobiology without strong simplifying assumptions about the dimensionality of sensory input or the duration of experiences.
Swipe Mosaics from Video
Sep 26, 2016



A panoramic image mosaic is an attractive visualization for viewing many overlapping photos, but its images must be both captured and processed correctly to produce an acceptable composite. We propose Swipe Mosaics, an interactive visualization that places the individual video frames on a 2D planar map that represents the layout of the physical scene. Compared to traditional panoramic mosaics, our capture is easier because the user can both translate the camera center and film moving subjects. Processing and display degrade gracefully if the footage lacks distinct, overlapping, non-repeating texture. Our proposed visual odometry algorithm produces a distribution over (x,y) translations for image pairs. Inferring a distribution of possible camera motions allows us to better cope with parallax, lack of texture, dynamic scenes, and other phenomena that hurt deterministic reconstruction techniques. Robustness is obtained by training on synthetic scenes with known camera motions. We show that Swipe Mosaics are easy to generate, support a wide range of difficult scenes, and are useful for documenting a scene for closer inspection.
Convolution by Evolution: Differentiable Pattern Producing Networks
Jun 08, 2016


In this work we introduce a differentiable version of the Compositional Pattern Producing Network, called the DPPN. Unlike a standard CPPN, the topology of a DPPN is evolved but the weights are learned. A Lamarckian algorithm, that combines evolution and learning, produces DPPNs to reconstruct an image. Our main result is that DPPNs can be evolved/trained to compress the weights of a denoising autoencoder from 157684 to roughly 200 parameters, while achieving a reconstruction accuracy comparable to a fully connected network with more than two orders of magnitude more parameters. The regularization ability of the DPPN allows it to rediscover (approximate) convolutional network architectures embedded within a fully connected architecture. Such convolutional architectures are the current state of the art for many computer vision applications, so it is satisfying that DPPNs are capable of discovering this structure rather than having to build it in by design. DPPNs exhibit better generalization when tested on the Omniglot dataset after being trained on MNIST, than directly encoded fully connected autoencoders. DPPNs are therefore a new framework for integrating learning and evolution.