 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHierarchical Perceiver
Feb 22, 2022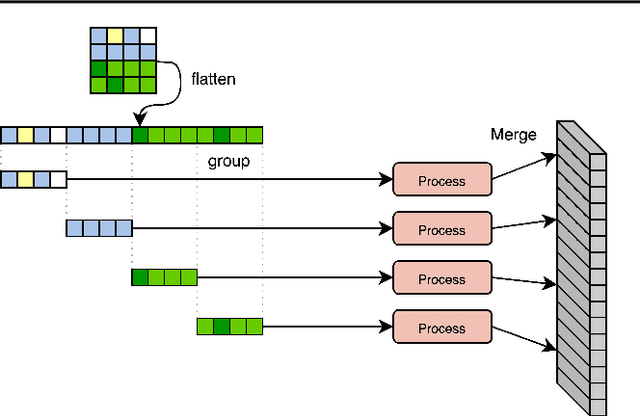

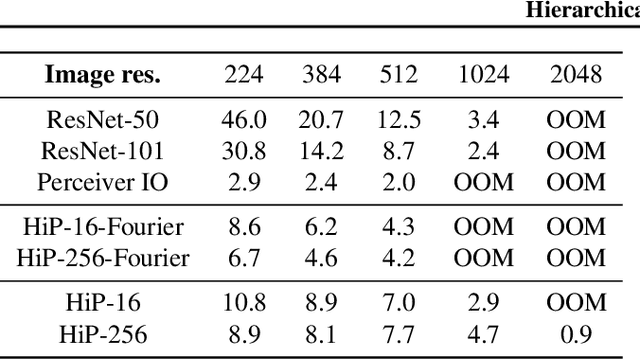
General perception systems such as Perceivers can process arbitrary modalities in any combination and are able to handle up to a few hundred thousand inputs. They achieve this generality by exclusively using global attention operations. This however hinders them from scaling up to the inputs sizes required to process raw high-resolution images or video. In this paper, we show that some degree of locality can be introduced back into these models, greatly improving their efficiency while preserving their generality. To scale them further, we introduce a self-supervised approach that enables learning dense low-dimensional positional embeddings for very large signals. We call the resulting model a Hierarchical Perceiver (HiP). HiP retains the ability to process arbitrary modalities, but now at higher-resolution and without any specialized preprocessing, improving over flat Perceivers in both efficiency and accuracy on the ImageNet, Audioset and PASCAL VOC datasets.
Perceiver IO: A General Architecture for Structured Inputs & Outputs
Aug 02, 2021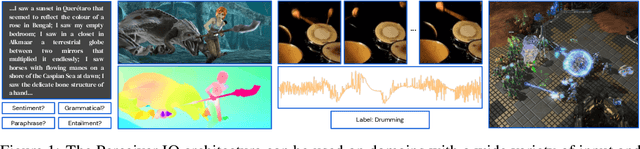
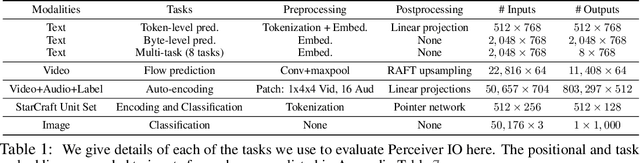
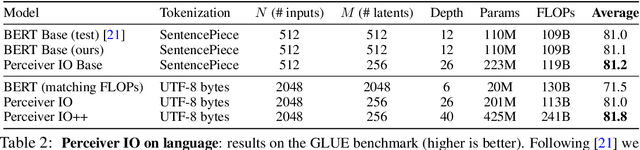
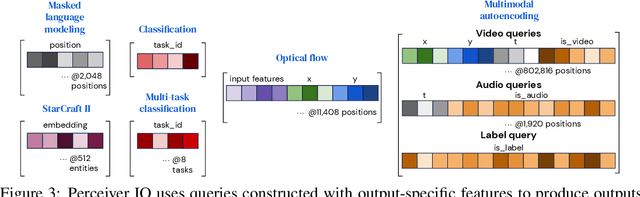
The recently-proposed Perceiver model obtains good results on several domains (images, audio, multimodal, point clouds) while scaling linearly in compute and memory with the input size. While the Perceiver supports many kinds of inputs, it can only produce very simple outputs such as class scores. Perceiver IO overcomes this limitation without sacrificing the original's appealing properties by learning to flexibly query the model's latent space to produce outputs of arbitrary size and semantics. Perceiver IO still decouples model depth from data size and still scales linearly with data size, but now with respect to both input and output sizes. The full Perceiver IO model achieves strong results on tasks with highly structured output spaces, such as natural language and visual understanding, StarCraft II, and multi-task and multi-modal domains. As highlights, Perceiver IO matches a Transformer-based BERT baseline on the GLUE language benchmark without the need for input tokenization and achieves state-of-the-art performance on Sintel optical flow estimation.
Making Sense of Reinforcement Learning and Probabilistic Inference
Feb 14, 2020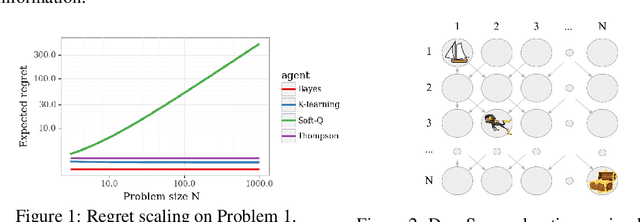
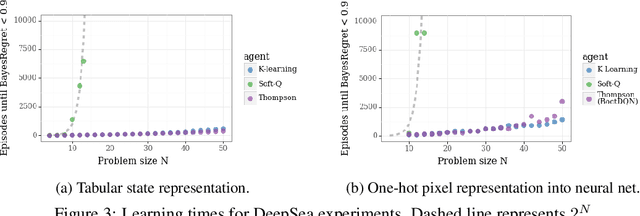
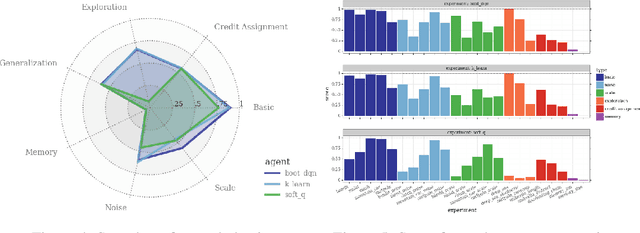
Reinforcement learning (RL) combines a control problem with statistical estimation: The system dynamics are not known to the agent, but can be learned through experience. A recent line of research casts 'RL as inference' and suggests a particular framework to generalize the RL problem as probabilistic inference. Our paper surfaces a key shortcoming in that approach, and clarifies the sense in which RL can be coherently cast as an inference problem. In particular, an RL agent must consider the effects of its actions upon future rewards and observations: The exploration-exploitation tradeoff. In all but the most simple settings, the resulting inference is computationally intractable so that practical RL algorithms must resort to approximation. We demonstrate that the popular 'RL as inference' approximation can perform poorly in even very basic problems. However, we show that with a small modification the framework does yield algorithms that can provably perform well, and we show that the resulting algorithm is equivalent to the recently proposed K-learning, which we further connect with Thompson sampling.
Unsupervised Learning of Object Keypoints for Perception and Control
Jun 19, 2019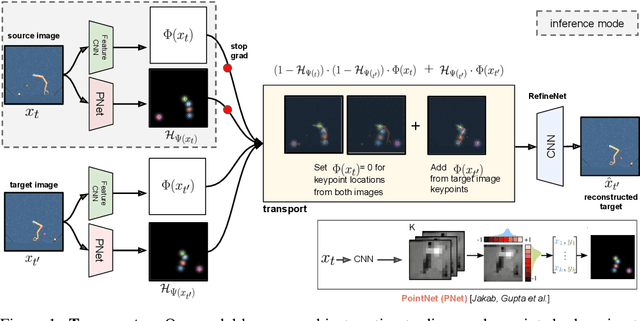
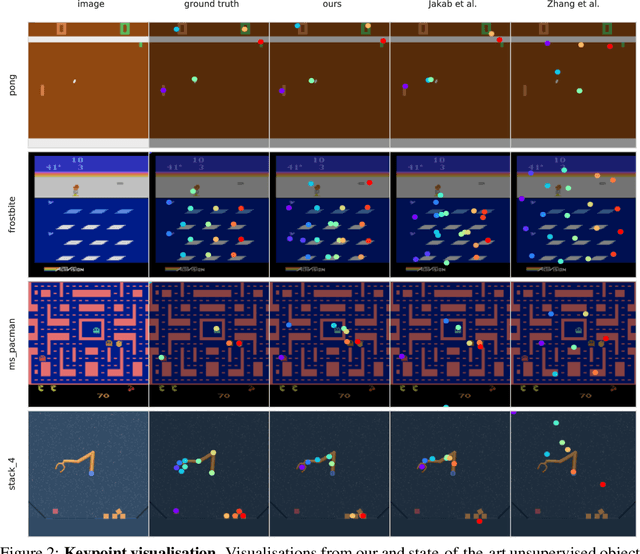
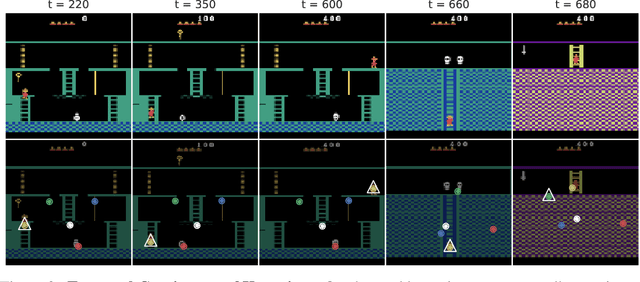
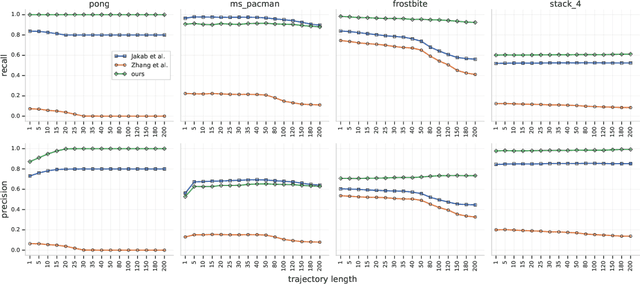
The study of object representations in computer vision has primarily focused on developing representations that are useful for image classification, object detection, or semantic segmentation as downstream tasks. In this work we aim to learn object representations that are useful for control and reinforcement learning (RL). To this end, we introduce Transporter, a neural network architecture for discovering concise geometric object representations in terms of keypoints or image-space coordinates. Our method learns from raw video frames in a fully unsupervised manner, by transporting learnt image features between video frames using a keypoint bottleneck. The discovered keypoints track objects and object parts across long time-horizons more accurately than recent similar methods. Furthermore, consistent long-term tracking enables two notable results in control domains -- (1) using the keypoint co-ordinates and corresponding image features as inputs enables highly sample-efficient reinforcement learning; (2) learning to explore by controlling keypoint locations drastically reduces the search space, enabling deep exploration (leading to states unreachable through random action exploration) without any extrinsic rewards.
Unsupervised Control Through Non-Parametric Discriminative Rewards
Nov 28, 2018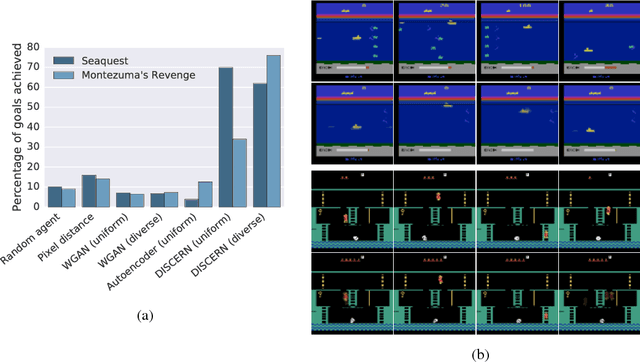
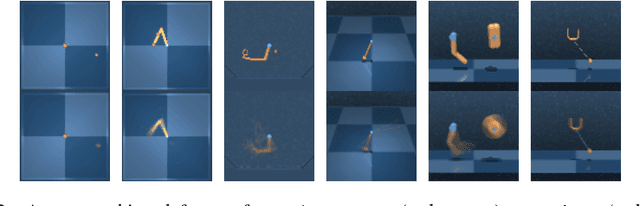
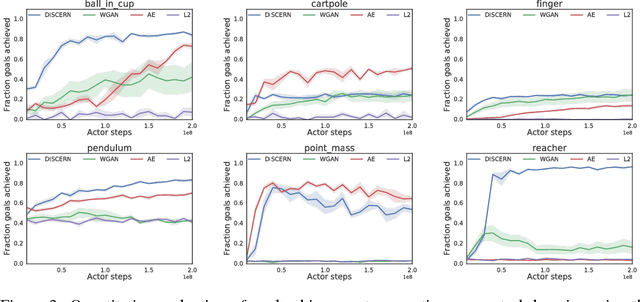
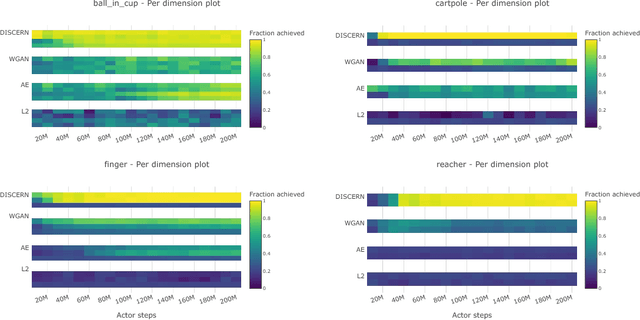
Learning to control an environment without hand-crafted rewards or expert data remains challenging and is at the frontier of reinforcement learning research. We present an unsupervised learning algorithm to train agents to achieve perceptually-specified goals using only a stream of observations and actions. Our agent simultaneously learns a goal-conditioned policy and a goal achievement reward function that measures how similar a state is to the goal state. This dual optimization leads to a co-operative game, giving rise to a learned reward function that reflects similarity in controllable aspects of the environment instead of distance in the space of observations. We demonstrate the efficacy of our agent to learn, in an unsupervised manner, to reach a diverse set of goals on three domains -- Atari, the DeepMind Control Suite and DeepMind Lab.
Using Fast Weights to Attend to the Recent Past
Dec 05, 2016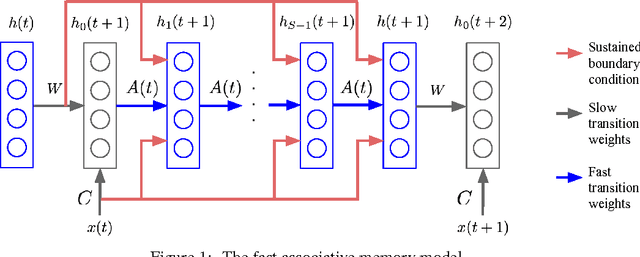
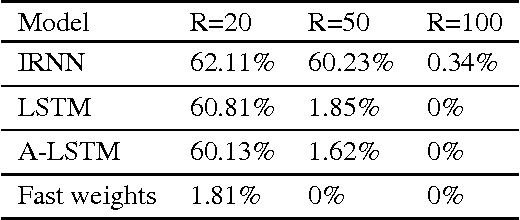
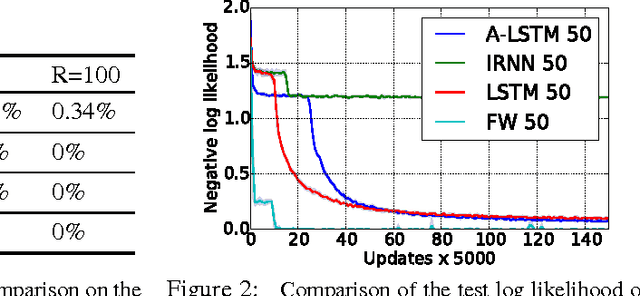
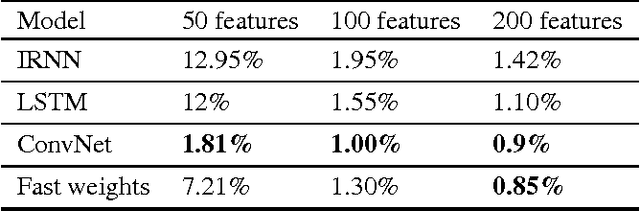
Until recently, research on artificial neural networks was largely restricted to systems with only two types of variable: Neural activities that represent the current or recent input and weights that learn to capture regularities among inputs, outputs and payoffs. There is no good reason for this restriction. Synapses have dynamics at many different time-scales and this suggests that artificial neural networks might benefit from variables that change slower than activities but much faster than the standard weights. These "fast weights" can be used to store temporary memories of the recent past and they provide a neurally plausible way of implementing the type of attention to the past that has recently proved very helpful in sequence-to-sequence models. By using fast weights we can avoid the need to store copies of neural activity patterns.
Training Deep Networks with Structured Layers by Matrix Backpropagation
Apr 14, 2016
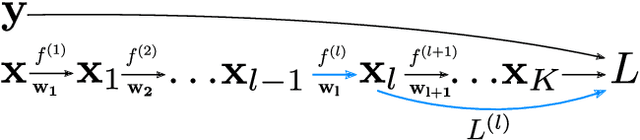

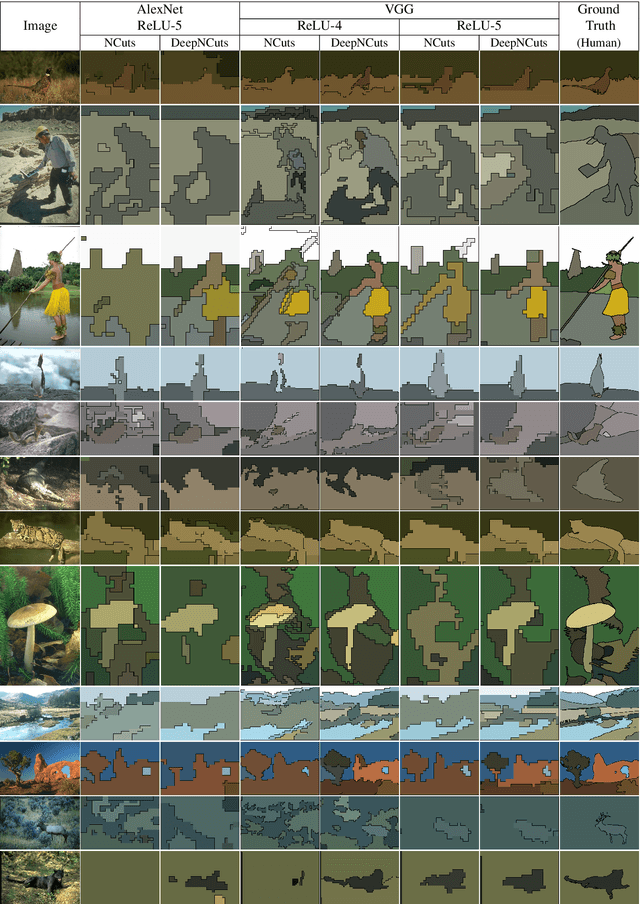
Deep neural network architectures have recently produced excellent results in a variety of areas in artificial intelligence and visual recognition, well surpassing traditional shallow architectures trained using hand-designed features. The power of deep networks stems both from their ability to perform local computations followed by pointwise non-linearities over increasingly larger receptive fields, and from the simplicity and scalability of the gradient-descent training procedure based on backpropagation. An open problem is the inclusion of layers that perform global, structured matrix computations like segmentation (e.g. normalized cuts) or higher-order pooling (e.g. log-tangent space metrics defined over the manifold of symmetric positive definite matrices) while preserving the validity and efficiency of an end-to-end deep training framework. In this paper we propose a sound mathematical apparatus to formally integrate global structured computation into deep computation architectures. At the heart of our methodology is the development of the theory and practice of backpropagation that generalizes to the calculus of adjoint matrix variations. The proposed matrix backpropagation methodology applies broadly to a variety of problems in machine learning or computational perception. Here we illustrate it by performing visual segmentation experiments using the BSDS and MSCOCO benchmarks, where we show that deep networks relying on second-order pooling and normalized cuts layers, trained end-to-end using matrix backpropagation, outperform counterparts that do not take advantage of such global layers.