 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlasticity as the Mirror of Empowerment
May 15, 2025Agents are minimally entities that are influenced by their past observations and act to influence future observations. This latter capacity is captured by empowerment, which has served as a vital framing concept across artificial intelligence and cognitive science. This former capacity, however, is equally foundational: In what ways, and to what extent, can an agent be influenced by what it observes? In this paper, we ground this concept in a universal agent-centric measure that we refer to as plasticity, and reveal a fundamental connection to empowerment. Following a set of desiderata on a suitable definition, we define plasticity using a new information-theoretic quantity we call the generalized directed information. We show that this new quantity strictly generalizes the directed information introduced by Massey (1990) while preserving all of its desirable properties. Our first finding is that plasticity is the mirror of empowerment: The agent's plasticity is identical to the empowerment of the environment, and vice versa. Our second finding establishes a tension between the plasticity and empowerment of an agent, suggesting that agent design needs to be mindful of both characteristics. We explore the implications of these findings, and suggest that plasticity, empowerment, and their relationship are essential to understanding agency.
Agency Is Frame-Dependent
Feb 06, 2025
Agency is a system's capacity to steer outcomes toward a goal, and is a central topic of study across biology, philosophy, cognitive science, and artificial intelligence. Determining if a system exhibits agency is a notoriously difficult question: Dennett (1989), for instance, highlights the puzzle of determining which principles can decide whether a rock, a thermostat, or a robot each possess agency. We here address this puzzle from the viewpoint of reinforcement learning by arguing that agency is fundamentally frame-dependent: Any measurement of a system's agency must be made relative to a reference frame. We support this claim by presenting a philosophical argument that each of the essential properties of agency proposed by Barandiaran et al. (2009) and Moreno (2018) are themselves frame-dependent. We conclude that any basic science of agency requires frame-dependence, and discuss the implications of this claim for reinforcement learning.
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
In-context Reinforcement Learning with Algorithm Distillation
Oct 25, 2022



We propose Algorithm Distillation (AD), a method for distilling reinforcement learning (RL) algorithms into neural networks by modeling their training histories with a causal sequence model. Algorithm Distillation treats learning to reinforcement learn as an across-episode sequential prediction problem. A dataset of learning histories is generated by a source RL algorithm, and then a causal transformer is trained by autoregressively predicting actions given their preceding learning histories as context. Unlike sequential policy prediction architectures that distill post-learning or expert sequences, AD is able to improve its policy entirely in-context without updating its network parameters. We demonstrate that AD can reinforcement learn in-context in a variety of environments with sparse rewards, combinatorial task structure, and pixel-based observations, and find that AD learns a more data-efficient RL algorithm than the one that generated the source data.
Uniqueness and Complexity of Inverse MDP Models
Jun 02, 2022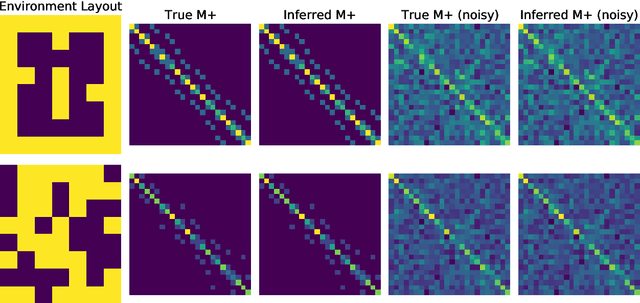
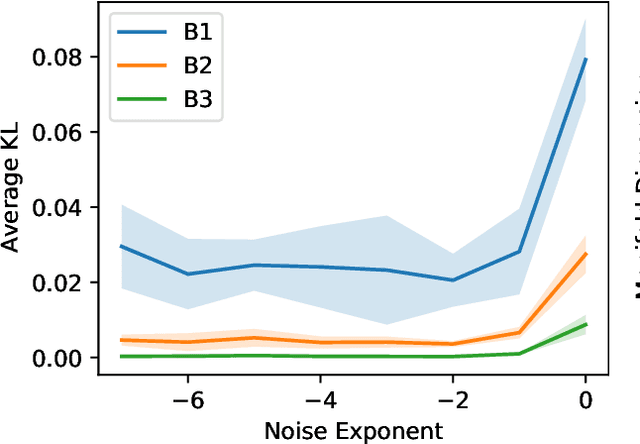
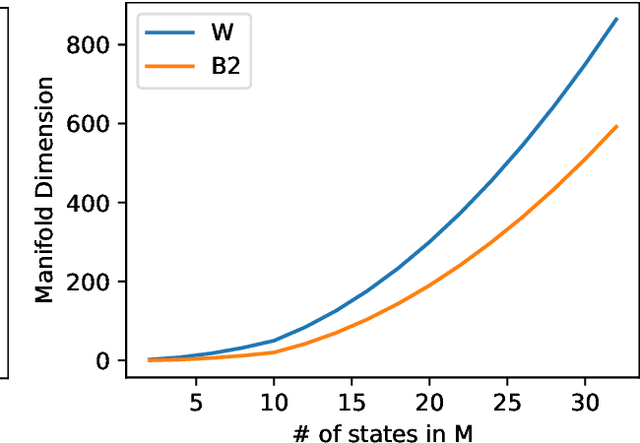
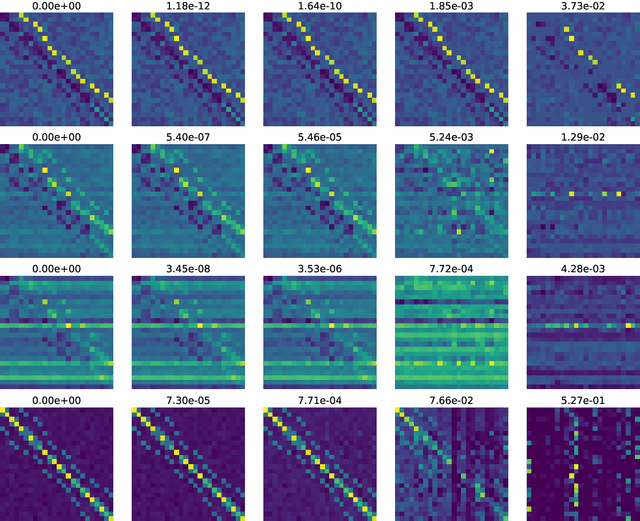
What is the action sequence aa'a" that was likely responsible for reaching state s"' (from state s) in 3 steps? Addressing such questions is important in causal reasoning and in reinforcement learning. Inverse "MDP" models p(aa'a"|ss"') can be used to answer them. In the traditional "forward" view, transition "matrix" p(s'|sa) and policy {\pi}(a|s) uniquely determine "everything": the whole dynamics p(as'a's"a"...|s), and with it, the action-conditional state process p(s's"...|saa'a"), the multi-step inverse models p(aa'a"...|ss^i), etc. If the latter is our primary concern, a natural question, analogous to the forward case is to which extent 1-step inverse model p(a|ss') plus policy {\pi}(a|s) determine the multi-step inverse models or even the whole dynamics. In other words, can forward models be inferred from inverse models or even be side-stepped. This work addresses this question and variations thereof, and also whether there are efficient decision/inference algorithms for this.
Wasserstein Distance Maximizing Intrinsic Control
Oct 28, 2021

This paper deals with the problem of learning a skill-conditioned policy that acts meaningfully in the absence of a reward signal. Mutual information based objectives have shown some success in learning skills that reach a diverse set of states in this setting. These objectives include a KL-divergence term, which is maximized by visiting distinct states even if those states are not far apart in the MDP. This paper presents an approach that rewards the agent for learning skills that maximize the Wasserstein distance of their state visitation from the start state of the skill. It shows that such an objective leads to a policy that covers more distance in the MDP than diversity based objectives, and validates the results on a variety of Atari environments.
Learning more skills through optimistic exploration
Jul 29, 2021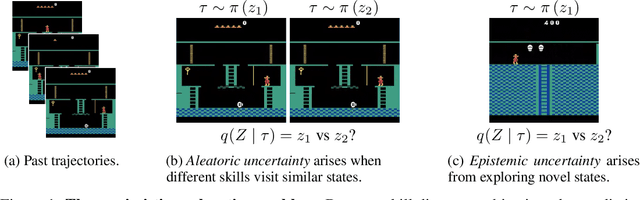
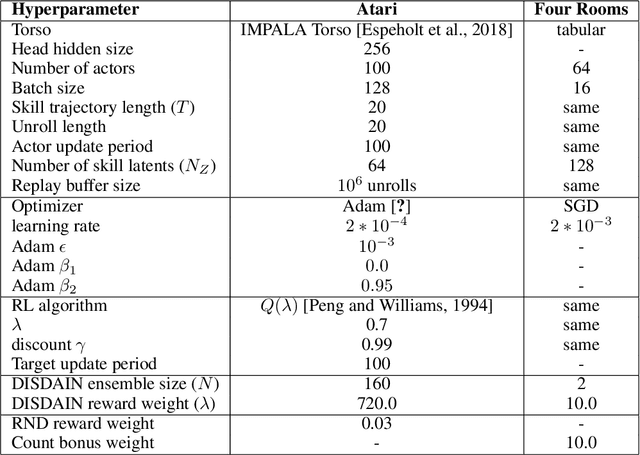


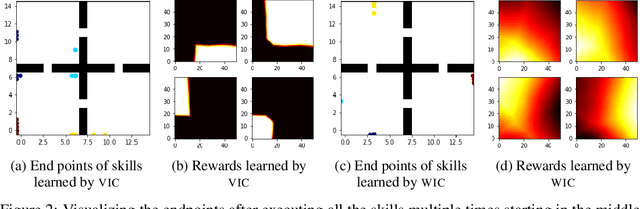
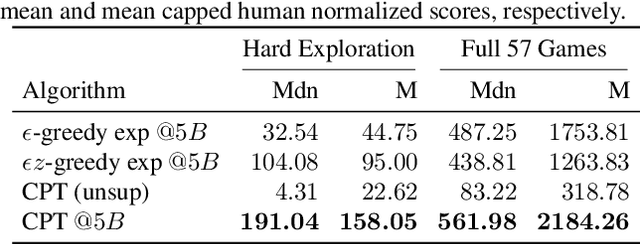
Unsupervised skill learning objectives (Gregor et al., 2016, Eysenbach et al., 2018) allow agents to learn rich repertoires of behavior in the absence of extrinsic rewards. They work by simultaneously training a policy to produce distinguishable latent-conditioned trajectories, and a discriminator to evaluate distinguishability by trying to infer latents from trajectories. The hope is for the agent to explore and master the environment by encouraging each skill (latent) to reliably reach different states. However, an inherent exploration problem lingers: when a novel state is actually encountered, the discriminator will necessarily not have seen enough training data to produce accurate and confident skill classifications, leading to low intrinsic reward for the agent and effective penalization of the sort of exploration needed to actually maximize the objective. To combat this inherent pessimism towards exploration, we derive an information gain auxiliary objective that involves training an ensemble of discriminators and rewarding the policy for their disagreement. Our objective directly estimates the epistemic uncertainty that comes from the discriminator not having seen enough training examples, thus providing an intrinsic reward more tailored to the true objective compared to pseudocount-based methods (Burda et al., 2019). We call this exploration bonus discriminator disagreement intrinsic reward, or DISDAIN. We demonstrate empirically that DISDAIN improves skill learning both in a tabular grid world (Four Rooms) and the 57 games of the Atari Suite (from pixels). Thus, we encourage researchers to treat pessimism with DISDAIN.
Coverage as a Principle for Discovering Transferable Behavior in Reinforcement Learning
Feb 24, 2021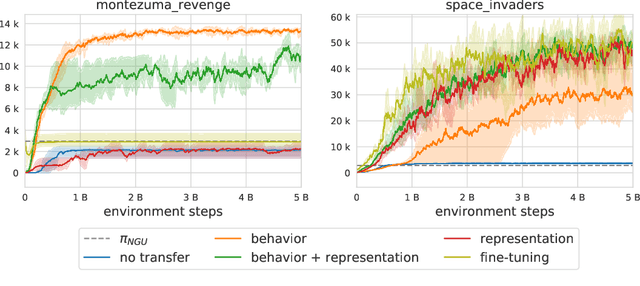
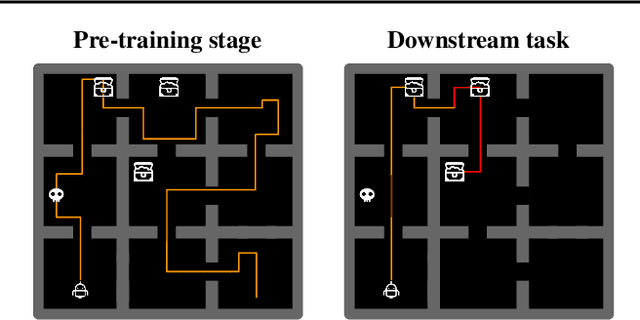
Designing agents that acquire knowledge autonomously and use it to solve new tasks efficiently is an important challenge in reinforcement learning, and unsupervised learning provides a useful paradigm for autonomous acquisition of task-agnostic knowledge. In supervised settings, representations discovered through unsupervised pre-training offer important benefits when transferred to downstream tasks. Given the nature of the reinforcement learning problem, we argue that representation alone is not enough for efficient transfer in challenging domains and explore how to transfer knowledge through behavior. The behavior of pre-trained policies may be used for solving the task at hand (exploitation), as well as for collecting useful data to solve the problem (exploration). We argue that policies pre-trained to maximize coverage will produce behavior that is useful for both strategies. When using these policies for both exploitation and exploration, our agents discover better solutions. The largest gains are generally observed in domains requiring structured exploration, including settings where the behavior of the pre-trained policies is misaligned with the downstream task.
Relative Variational Intrinsic Control
Dec 14, 2020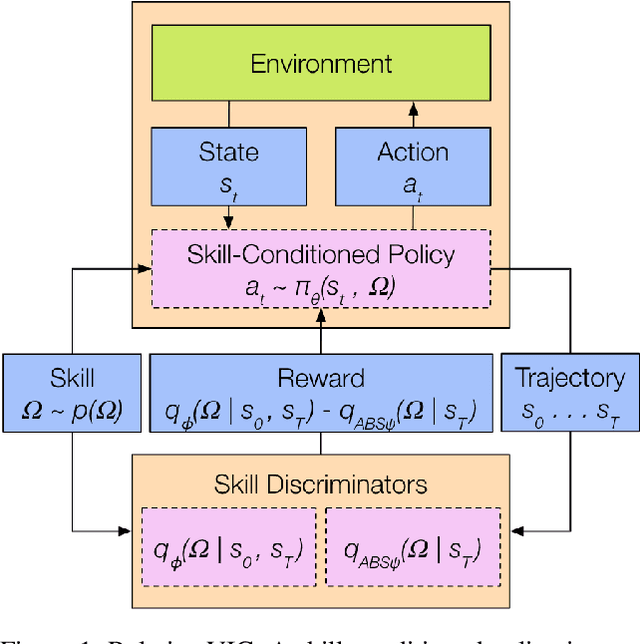
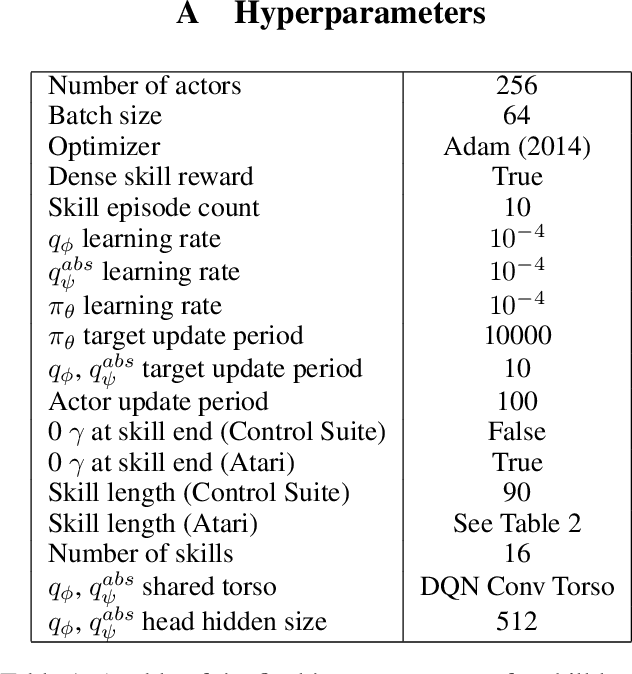
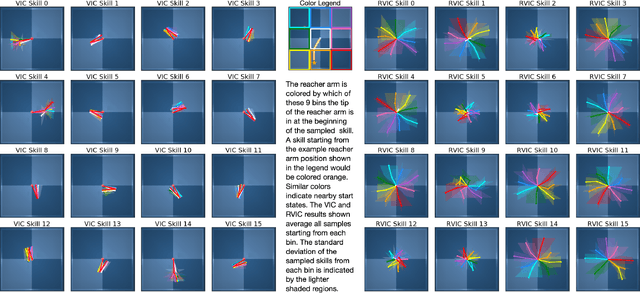
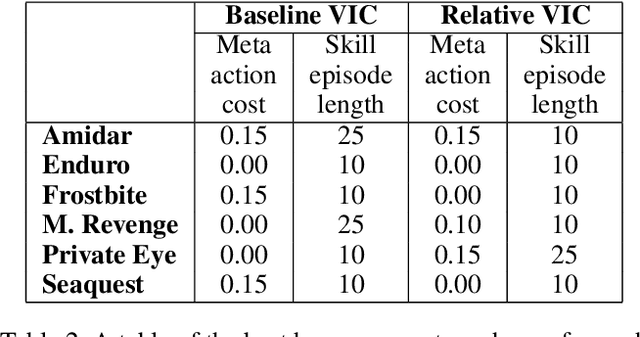
In the absence of external rewards, agents can still learn useful behaviors by identifying and mastering a set of diverse skills within their environment. Existing skill learning methods use mutual information objectives to incentivize each skill to be diverse and distinguishable from the rest. However, if care is not taken to constrain the ways in which the skills are diverse, trivially diverse skill sets can arise. To ensure useful skill diversity, we propose a novel skill learning objective, Relative Variational Intrinsic Control (RVIC), which incentivizes learning skills that are distinguishable in how they change the agent's relationship to its environment. The resulting set of skills tiles the space of affordances available to the agent. We qualitatively analyze skill behaviors on multiple environments and show how RVIC skills are more useful than skills discovered by existing methods when used in hierarchical reinforcement learning.