 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Vision-Language Models as a Source of Rewards
Dec 14, 2023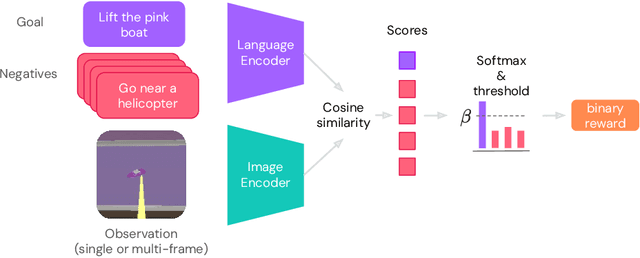
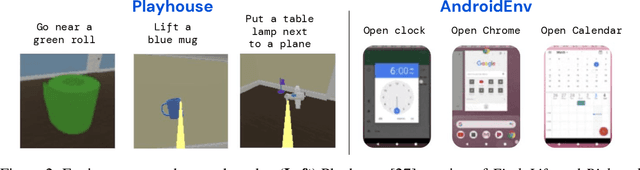
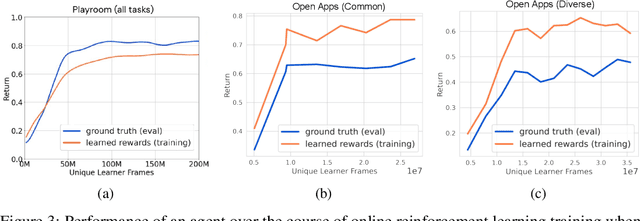
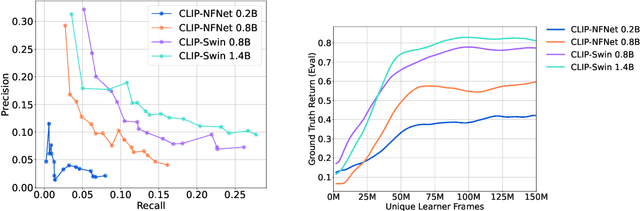
Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
In-context Reinforcement Learning with Algorithm Distillation
Oct 25, 2022



We propose Algorithm Distillation (AD), a method for distilling reinforcement learning (RL) algorithms into neural networks by modeling their training histories with a causal sequence model. Algorithm Distillation treats learning to reinforcement learn as an across-episode sequential prediction problem. A dataset of learning histories is generated by a source RL algorithm, and then a causal transformer is trained by autoregressively predicting actions given their preceding learning histories as context. Unlike sequential policy prediction architectures that distill post-learning or expert sequences, AD is able to improve its policy entirely in-context without updating its network parameters. We demonstrate that AD can reinforcement learn in-context in a variety of environments with sparse rewards, combinatorial task structure, and pixel-based observations, and find that AD learns a more data-efficient RL algorithm than the one that generated the source data.
Don't Change the Algorithm, Change the Data: Exploratory Data for Offline Reinforcement Learning
Feb 08, 2022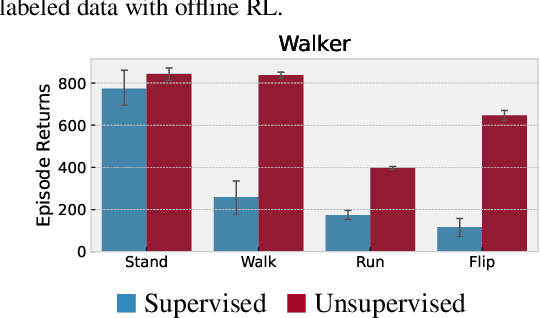
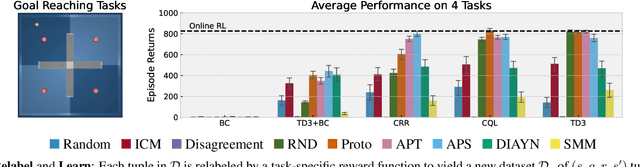
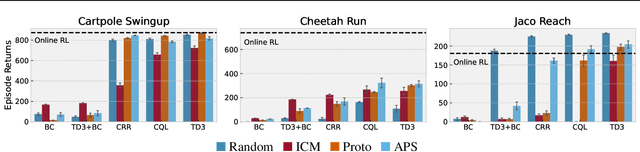
Recent progress in deep learning has relied on access to large and diverse datasets. Such data-driven progress has been less evident in offline reinforcement learning (RL), because offline RL data is usually collected to optimize specific target tasks limiting the data's diversity. In this work, we propose Exploratory data for Offline RL (ExORL), a data-centric approach to offline RL. ExORL first generates data with unsupervised reward-free exploration, then relabels this data with a downstream reward before training a policy with offline RL. We find that exploratory data allows vanilla off-policy RL algorithms, without any offline-specific modifications, to outperform or match state-of-the-art offline RL algorithms on downstream tasks. Our findings suggest that data generation is as important as algorithmic advances for offline RL and hence requires careful consideration from the community. Code and data can be found at https://github.com/denisyarats/exorl .
CIC: Contrastive Intrinsic Control for Unsupervised Skill Discovery
Feb 01, 2022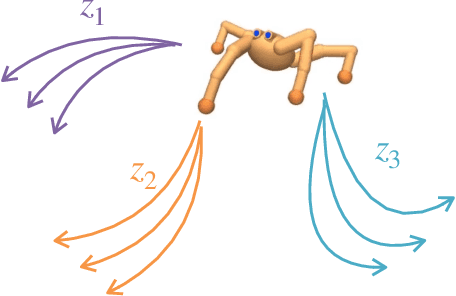
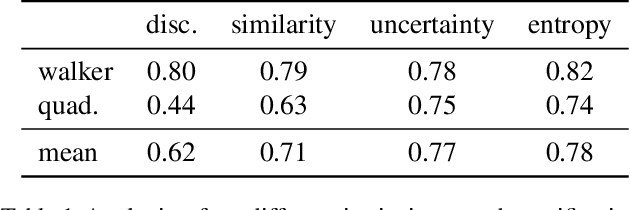
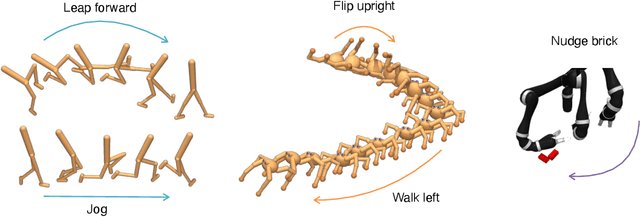
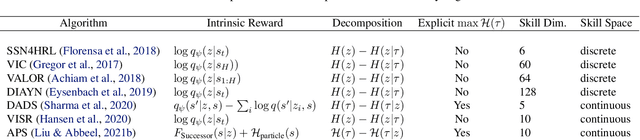
We introduce Contrastive Intrinsic Control (CIC), an algorithm for unsupervised skill discovery that maximizes the mutual information between skills and state transitions. In contrast to most prior approaches, CIC uses a decomposition of the mutual information that explicitly incentivizes diverse behaviors by maximizing state entropy. We derive a novel lower bound estimate for the mutual information which combines a particle estimator for state entropy to generate diverse behaviors and contrastive learning to distill these behaviors into distinct skills. We evaluate our algorithm on the Unsupervised Reinforcement Learning Benchmark, which consists of a long reward-free pre-training phase followed by a short adaptation phase to downstream tasks with extrinsic rewards. We find that CIC substantially improves over prior unsupervised skill discovery methods and outperforms the next leading overall exploration algorithm in terms of downstream task performance.
URLB: Unsupervised Reinforcement Learning Benchmark
Oct 28, 2021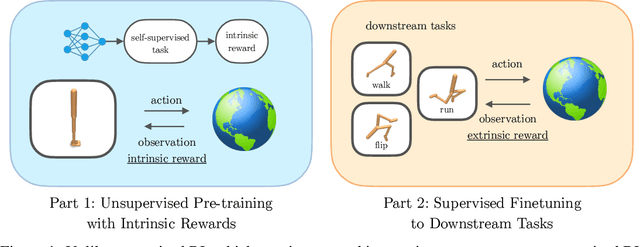
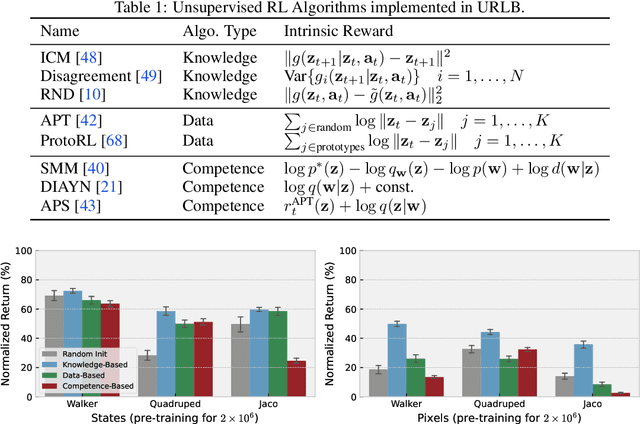
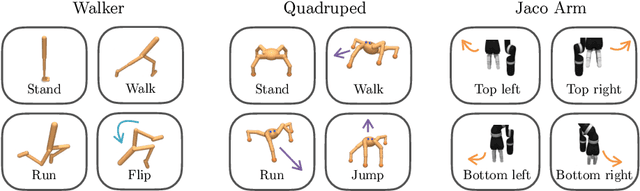
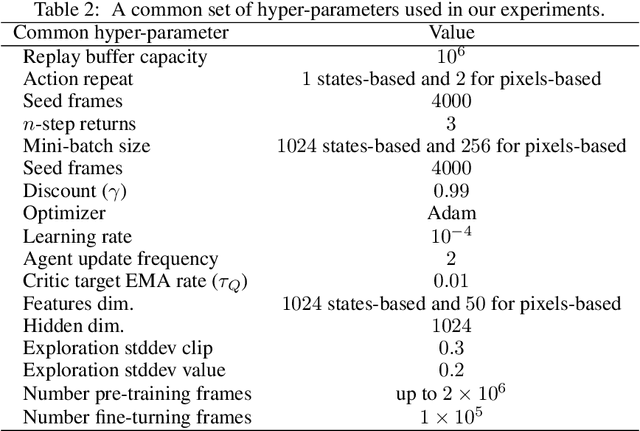
Deep Reinforcement Learning (RL) has emerged as a powerful paradigm to solve a range of complex yet specific control tasks. Yet training generalist agents that can quickly adapt to new tasks remains an outstanding challenge. Recent advances in unsupervised RL have shown that pre-training RL agents with self-supervised intrinsic rewards can result in efficient adaptation. However, these algorithms have been hard to compare and develop due to the lack of a unified benchmark. To this end, we introduce the Unsupervised Reinforcement Learning Benchmark (URLB). URLB consists of two phases: reward-free pre-training and downstream task adaptation with extrinsic rewards. Building on the DeepMind Control Suite, we provide twelve continuous control tasks from three domains for evaluation and open-source code for eight leading unsupervised RL methods. We find that the implemented baselines make progress but are not able to solve URLB and propose directions for future research.
Skill Preferences: Learning to Extract and Execute Robotic Skills from Human Feedback
Aug 11, 2021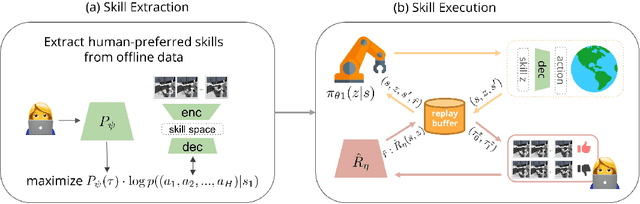
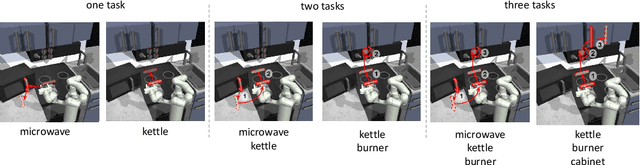
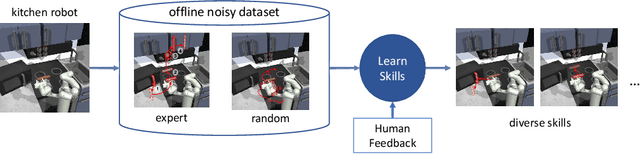
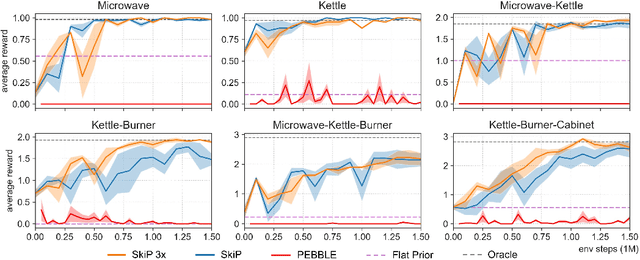
A promising approach to solving challenging long-horizon tasks has been to extract behavior priors (skills) by fitting generative models to large offline datasets of demonstrations. However, such generative models inherit the biases of the underlying data and result in poor and unusable skills when trained on imperfect demonstration data. To better align skill extraction with human intent we present Skill Preferences (SkiP), an algorithm that learns a model over human preferences and uses it to extract human-aligned skills from offline data. After extracting human-preferred skills, SkiP also utilizes human feedback to solve down-stream tasks with RL. We show that SkiP enables a simulated kitchen robot to solve complex multi-step manipulation tasks and substantially outperforms prior leading RL algorithms with human preferences as well as leading skill extraction algorithms without human preferences.
Hierarchical Few-Shot Imitation with Skill Transition Models
Jul 19, 2021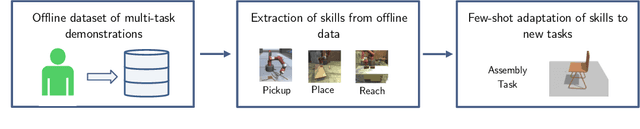
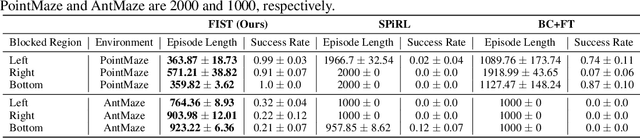
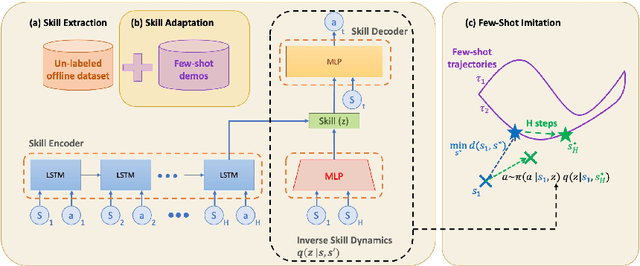

A desirable property of autonomous agents is the ability to both solve long-horizon problems and generalize to unseen tasks. Recent advances in data-driven skill learning have shown that extracting behavioral priors from offline data can enable agents to solve challenging long-horizon tasks with reinforcement learning. However, generalization to tasks unseen during behavioral prior training remains an outstanding challenge. To this end, we present Few-shot Imitation with Skill Transition Models (FIST), an algorithm that extracts skills from offline data and utilizes them to generalize to unseen tasks given a few downstream demonstrations. FIST learns an inverse skill dynamics model, a distance function, and utilizes a semi-parametric approach for imitation. We show that FIST is capable of generalizing to new tasks and substantially outperforms prior baselines in navigation experiments requiring traversing unseen parts of a large maze and 7-DoF robotic arm experiments requiring manipulating previously unseen objects in a kitchen.
Decision Transformer: Reinforcement Learning via Sequence Modeling
Jun 24, 2021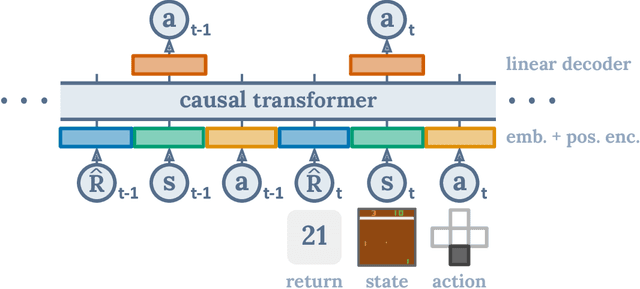
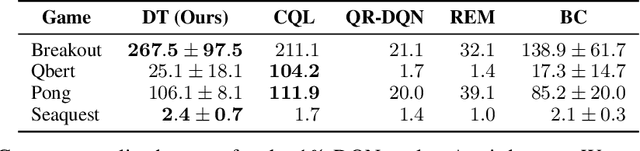


We introduce a framework that abstracts Reinforcement Learning (RL) as a sequence modeling problem. This allows us to draw upon the simplicity and scalability of the Transformer architecture, and associated advances in language modeling such as GPT-x and BERT. In particular, we present Decision Transformer, an architecture that casts the problem of RL as conditional sequence modeling. Unlike prior approaches to RL that fit value functions or compute policy gradients, Decision Transformer simply outputs the optimal actions by leveraging a causally masked Transformer. By conditioning an autoregressive model on the desired return (reward), past states, and actions, our Decision Transformer model can generate future actions that achieve the desired return. Despite its simplicity, Decision Transformer matches or exceeds the performance of state-of-the-art model-free offline RL baselines on Atari, OpenAI Gym, and Key-to-Door tasks.