 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecision Transformer: Reinforcement Learning via Sequence Modeling
Jun 24, 2021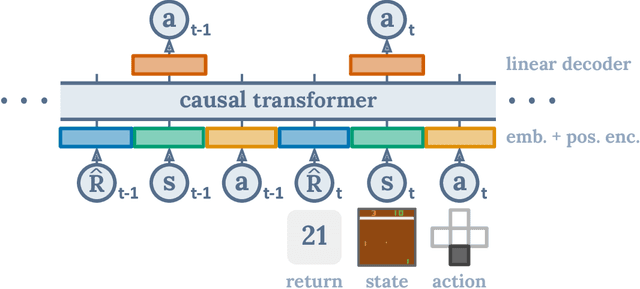
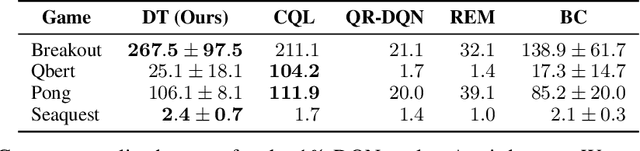


We introduce a framework that abstracts Reinforcement Learning (RL) as a sequence modeling problem. This allows us to draw upon the simplicity and scalability of the Transformer architecture, and associated advances in language modeling such as GPT-x and BERT. In particular, we present Decision Transformer, an architecture that casts the problem of RL as conditional sequence modeling. Unlike prior approaches to RL that fit value functions or compute policy gradients, Decision Transformer simply outputs the optimal actions by leveraging a causally masked Transformer. By conditioning an autoregressive model on the desired return (reward), past states, and actions, our Decision Transformer model can generate future actions that achieve the desired return. Despite its simplicity, Decision Transformer matches or exceeds the performance of state-of-the-art model-free offline RL baselines on Atari, OpenAI Gym, and Key-to-Door tasks.
VideoGPT: Video Generation using VQ-VAE and Transformers
Apr 20, 2021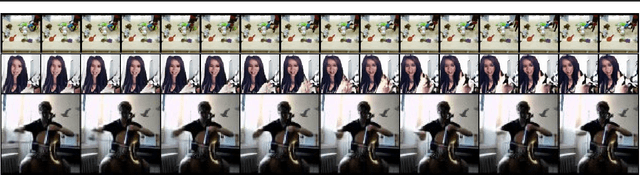
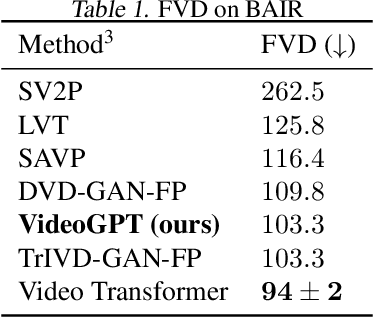
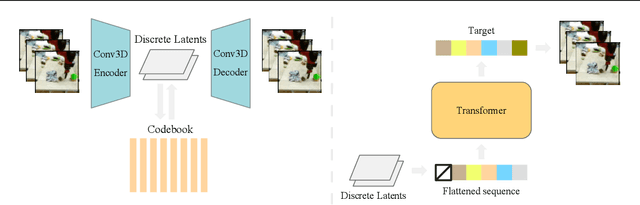
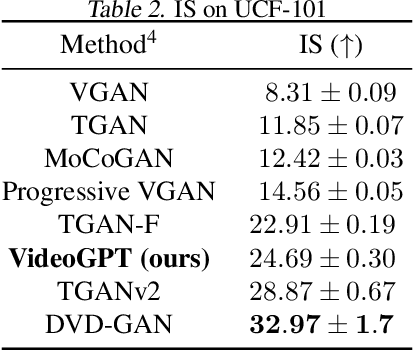
We present VideoGPT: a conceptually simple architecture for scaling likelihood based generative modeling to natural videos. VideoGPT uses VQ-VAE that learns downsampled discrete latent representations of a raw video by employing 3D convolutions and axial self-attention. A simple GPT-like architecture is then used to autoregressively model the discrete latents using spatio-temporal position encodings. Despite the simplicity in formulation and ease of training, our architecture is able to generate samples competitive with state-of-the-art GAN models for video generation on the BAIR Robot dataset, and generate high fidelity natural images from UCF-101 and Tumbler GIF Dataset (TGIF). We hope our proposed architecture serves as a reproducible reference for a minimalistic implementation of transformer based video generation models. Samples and code are available at https://wilson1yan.github.io/videogpt/index.html
Scaling Local Self-Attention for Parameter Efficient Visual Backbones
Mar 30, 2021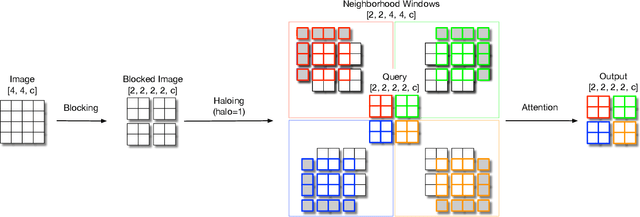
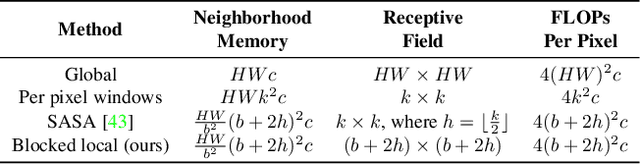
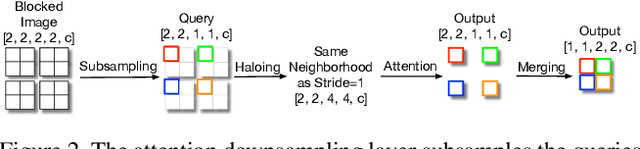
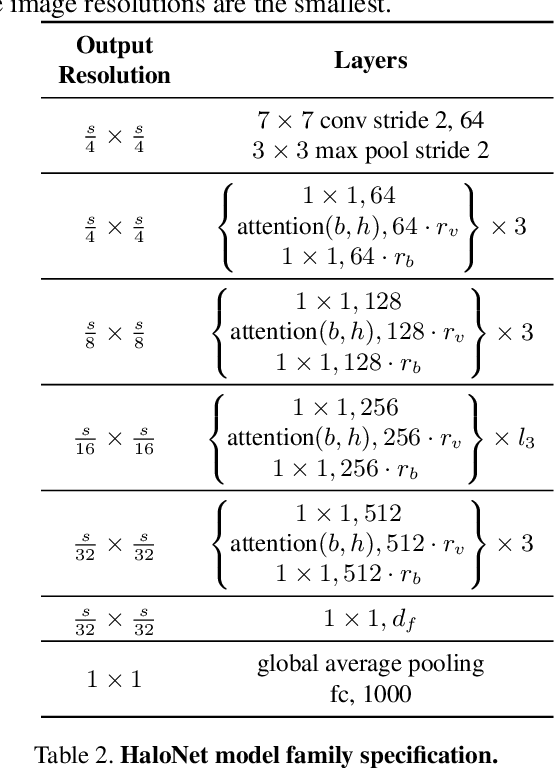
Self-attention has the promise of improving computer vision systems due to parameter-independent scaling of receptive fields and content-dependent interactions, in contrast to parameter-dependent scaling and content-independent interactions of convolutions. Self-attention models have recently been shown to have encouraging improvements on accuracy-parameter trade-offs compared to baseline convolutional models such as ResNet-50. In this work, we aim to develop self-attention models that can outperform not just the canonical baseline models, but even the high-performing convolutional models. We propose two extensions to self-attention that, in conjunction with a more efficient implementation of self-attention, improve the speed, memory usage, and accuracy of these models. We leverage these improvements to develop a new self-attention model family, HaloNets, which reach state-of-the-art accuracies on the parameter-limited setting of the ImageNet classification benchmark. In preliminary transfer learning experiments, we find that HaloNet models outperform much larger models and have better inference performance. On harder tasks such as object detection and instance segmentation, our simple local self-attention and convolutional hybrids show improvements over very strong baselines. These results mark another step in demonstrating the efficacy of self-attention models on settings traditionally dominated by convolutional models.
Revisiting ResNets: Improved Training and Scaling Strategies
Mar 13, 2021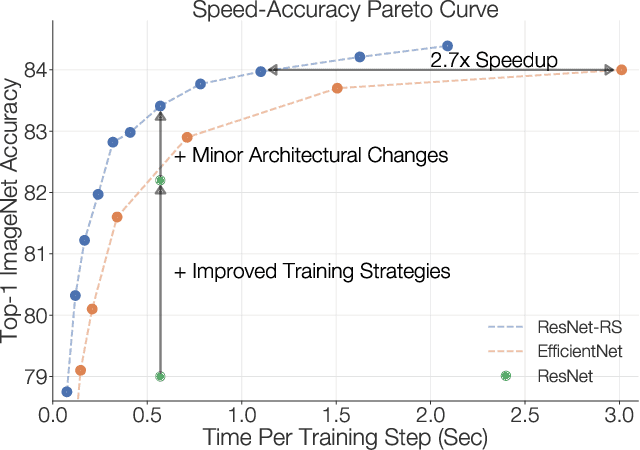
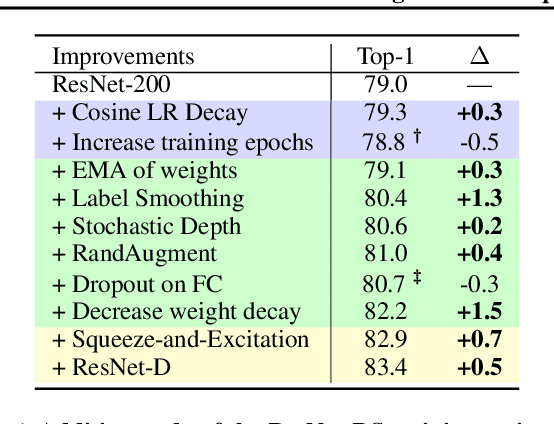
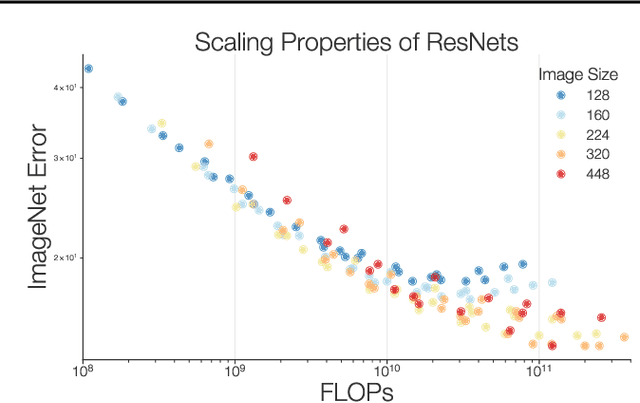
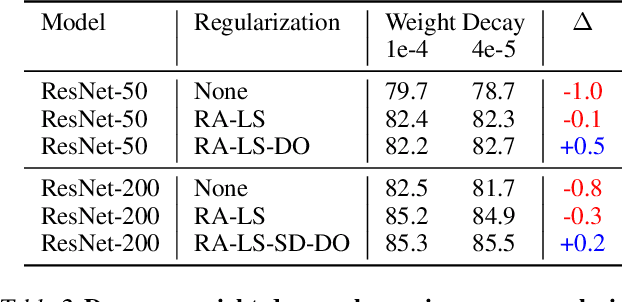
Novel computer vision architectures monopolize the spotlight, but the impact of the model architecture is often conflated with simultaneous changes to training methodology and scaling strategies. Our work revisits the canonical ResNet (He et al., 2015) and studies these three aspects in an effort to disentangle them. Perhaps surprisingly, we find that training and scaling strategies may matter more than architectural changes, and further, that the resulting ResNets match recent state-of-the-art models. We show that the best performing scaling strategy depends on the training regime and offer two new scaling strategies: (1) scale model depth in regimes where overfitting can occur (width scaling is preferable otherwise); (2) increase image resolution more slowly than previously recommended (Tan & Le, 2019). Using improved training and scaling strategies, we design a family of ResNet architectures, ResNet-RS, which are 1.7x - 2.7x faster than EfficientNets on TPUs, while achieving similar accuracies on ImageNet. In a large-scale semi-supervised learning setup, ResNet-RS achieves 86.2% top-1 ImageNet accuracy, while being 4.7x faster than EfficientNet NoisyStudent. The training techniques improve transfer performance on a suite of downstream tasks (rivaling state-of-the-art self-supervised algorithms) and extend to video classification on Kinetics-400. We recommend practitioners use these simple revised ResNets as baselines for future research.
Improving Computational Efficiency in Visual Reinforcement Learning via Stored Embeddings
Mar 04, 2021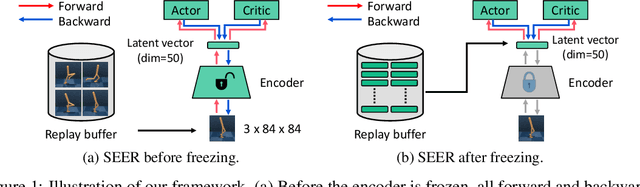
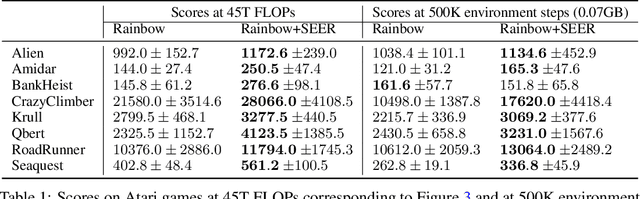
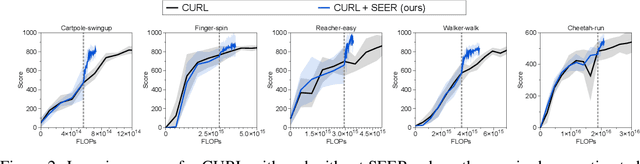
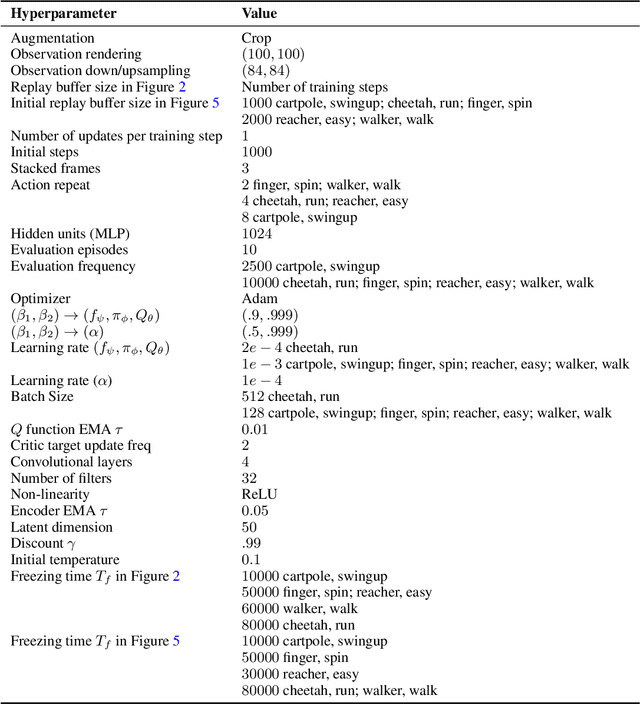
Recent advances in off-policy deep reinforcement learning (RL) have led to impressive success in complex tasks from visual observations. Experience replay improves sample-efficiency by reusing experiences from the past, and convolutional neural networks (CNNs) process high-dimensional inputs effectively. However, such techniques demand high memory and computational bandwidth. In this paper, we present Stored Embeddings for Efficient Reinforcement Learning (SEER), a simple modification of existing off-policy RL methods, to address these computational and memory requirements. To reduce the computational overhead of gradient updates in CNNs, we freeze the lower layers of CNN encoders early in training due to early convergence of their parameters. Additionally, we reduce memory requirements by storing the low-dimensional latent vectors for experience replay instead of high-dimensional images, enabling an adaptive increase in the replay buffer capacity, a useful technique in constrained-memory settings. In our experiments, we show that SEER does not degrade the performance of RL agents while significantly saving computation and memory across a diverse set of DeepMind Control environments and Atari games. Finally, we show that SEER is useful for computation-efficient transfer learning in RL because lower layers of CNNs extract generalizable features, which can be used for different tasks and domains.
Bottleneck Transformers for Visual Recognition
Jan 27, 2021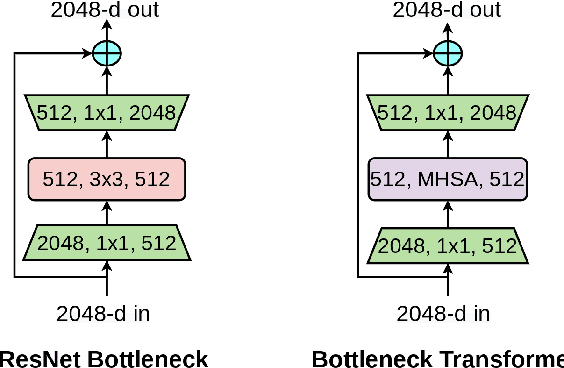
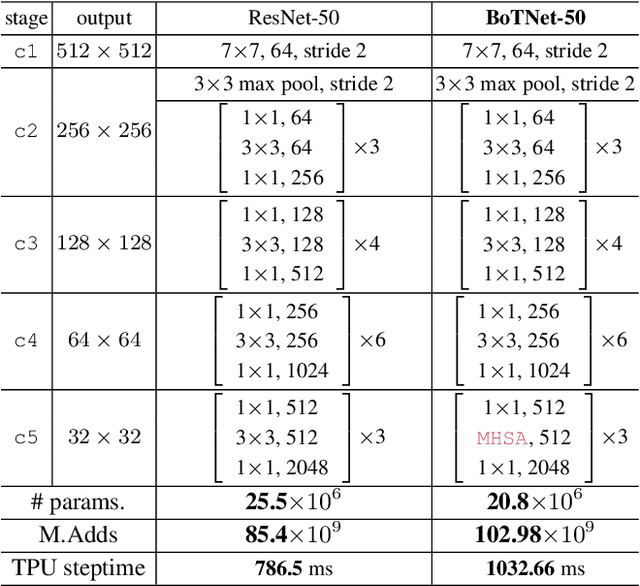
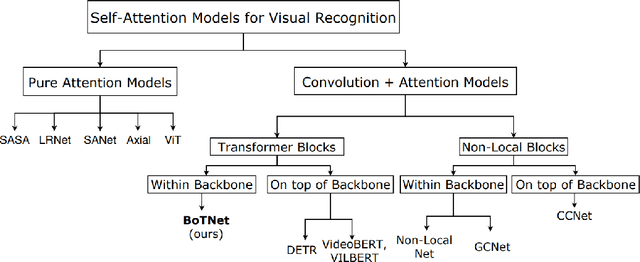
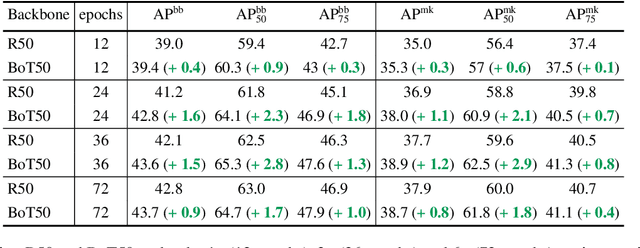
We present BoTNet, a conceptually simple yet powerful backbone architecture that incorporates self-attention for multiple computer vision tasks including image classification, object detection and instance segmentation. By just replacing the spatial convolutions with global self-attention in the final three bottleneck blocks of a ResNet and no other changes, our approach improves upon the baselines significantly on instance segmentation and object detection while also reducing the parameters, with minimal overhead in latency. Through the design of BoTNet, we also point out how ResNet bottleneck blocks with self-attention can be viewed as Transformer blocks. Without any bells and whistles, BoTNet achieves 44.4% Mask AP and 49.7% Box AP on the COCO Instance Segmentation benchmark using the Mask R-CNN framework; surpassing the previous best published single model and single scale results of ResNeSt evaluated on the COCO validation set. Finally, we present a simple adaptation of the BoTNet design for image classification, resulting in models that achieve a strong performance of 84.7% top-1 accuracy on the ImageNet benchmark while being up to 2.33x faster in compute time than the popular EfficientNet models on TPU-v3 hardware. We hope our simple and effective approach will serve as a strong baseline for future research in self-attention models for vision.
Reinforcement Learning with Latent Flow
Jan 06, 2021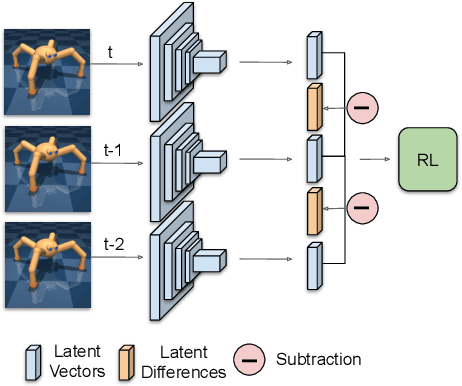
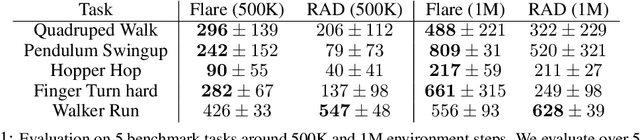
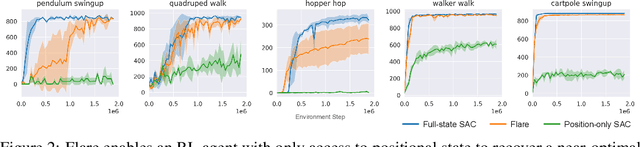

Temporal information is essential to learning effective policies with Reinforcement Learning (RL). However, current state-of-the-art RL algorithms either assume that such information is given as part of the state space or, when learning from pixels, use the simple heuristic of frame-stacking to implicitly capture temporal information present in the image observations. This heuristic is in contrast to the current paradigm in video classification architectures, which utilize explicit encodings of temporal information through methods such as optical flow and two-stream architectures to achieve state-of-the-art performance. Inspired by leading video classification architectures, we introduce the Flow of Latents for Reinforcement Learning (Flare), a network architecture for RL that explicitly encodes temporal information through latent vector differences. We show that Flare (i) recovers optimal performance in state-based RL without explicit access to the state velocity, solely with positional state information, (ii) achieves state-of-the-art performance on pixel-based challenging continuous control tasks within the DeepMind control benchmark suite, namely quadruped walk, hopper hop, finger turn hard, pendulum swing, and walker run, and is the most sample efficient model-free pixel-based RL algorithm, outperforming the prior model-free state-of-the-art by 1.9X and 1.5X on the 500k and 1M step benchmarks, respectively, and (iv), when augmented over rainbow DQN, outperforms this state-of-the-art level baseline on 5 of 8 challenging Atari games at 100M time step benchmark.
Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation
Dec 13, 2020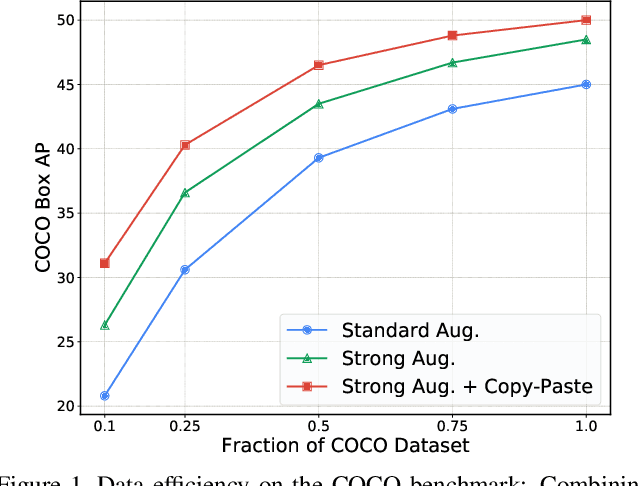
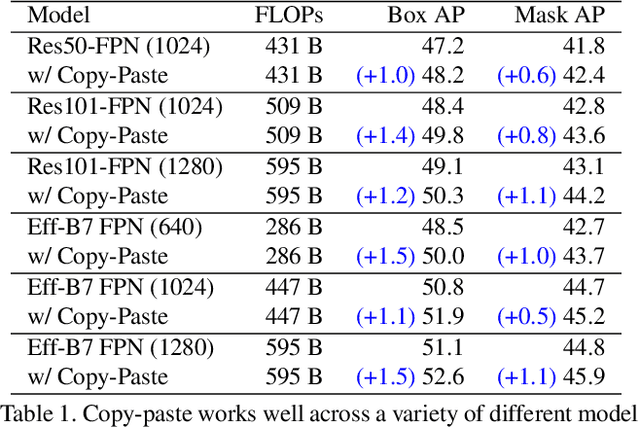
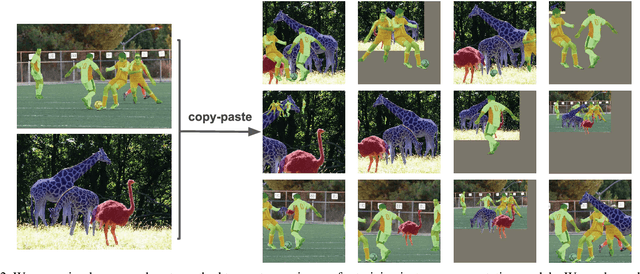

Building instance segmentation models that are data-efficient and can handle rare object categories is an important challenge in computer vision. Leveraging data augmentations is a promising direction towards addressing this challenge. Here, we perform a systematic study of the Copy-Paste augmentation ([13, 12]) for instance segmentation where we randomly paste objects onto an image. Prior studies on Copy-Paste relied on modeling the surrounding visual context for pasting the objects. However, we find that the simple mechanism of pasting objects randomly is good enough and can provide solid gains on top of strong baselines. Furthermore, we show Copy-Paste is additive with semi-supervised methods that leverage extra data through pseudo labeling (e.g. self-training). On COCO instance segmentation, we achieve 49.1 mask AP and 57.3 box AP, an improvement of +0.6 mask AP and +1.5 box AP over the previous state-of-the-art. We further demonstrate that Copy-Paste can lead to significant improvements on the LVIS benchmark. Our baseline model outperforms the LVIS 2020 Challenge winning entry by +3.6 mask AP on rare categories.
D2RL: Deep Dense Architectures in Reinforcement Learning
Oct 19, 2020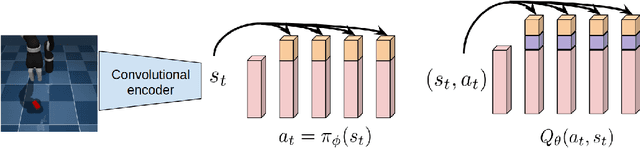
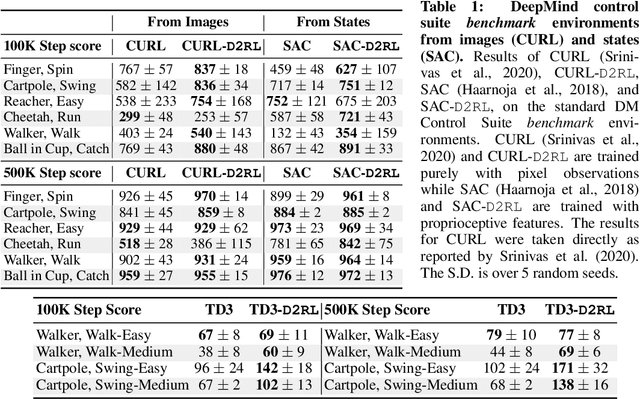
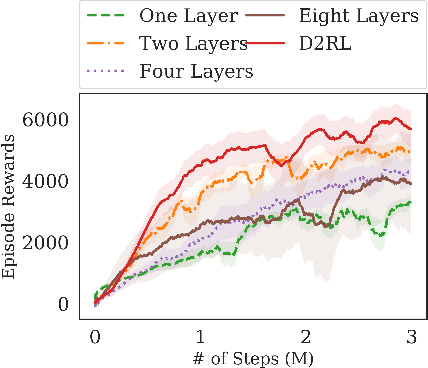
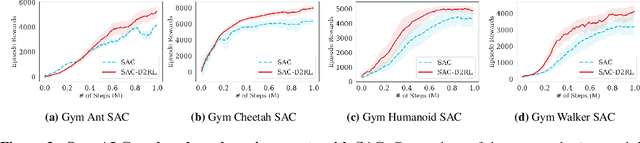
While improvements in deep learning architectures have played a crucial role in improving the state of supervised and unsupervised learning in computer vision and natural language processing, neural network architecture choices for reinforcement learning remain relatively under-explored. We take inspiration from successful architectural choices in computer vision and generative modelling, and investigate the use of deeper networks and dense connections for reinforcement learning on a variety of simulated robotic learning benchmark environments. Our findings reveal that current methods benefit significantly from dense connections and deeper networks, across a suite of manipulation and locomotion tasks, for both proprioceptive and image-based observations. We hope that our results can serve as a strong baseline and further motivate future research into neural network architectures for reinforcement learning. The project website with code is at this link https://sites.google.com/view/d2rl/home.
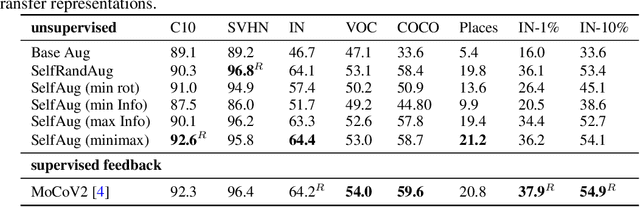
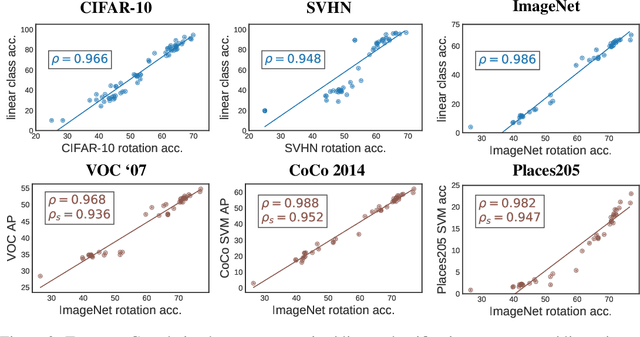
Evaluating Self-Supervised Pretraining Without Using Labels
Sep 16, 2020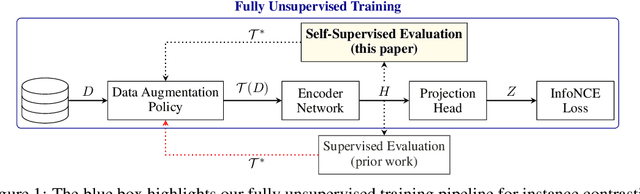
A common practice in unsupervised representation learning is to use labeled data to evaluate the learned representations - oftentimes using the labels from the "unlabeled" training dataset. This supervised evaluation is then used to guide the training process, e.g. to select augmentation policies. However, supervised evaluations may not be possible when labeled data is difficult to obtain (such as medical imaging) or ambiguous to label (such as fashion categorization). This raises the question: is it possible to evaluate unsupervised models without using labeled data? Furthermore, is it possible to use this evaluation to make decisions about the training process, such as which augmentation policies to use? In this work, we show that the simple self-supervised evaluation task of image rotation prediction is highly correlated with the supervised performance of standard visual recognition tasks and datasets (rank correlation > 0.94). We establish this correlation across hundreds of augmentation policies and training schedules and show how this evaluation criteria can be used to automatically select augmentation policies without using labels. Despite not using any labeled data, these policies perform comparably with policies that were determined using supervised downstream tasks. Importantly, this work explores the idea of using unsupervised evaluation criteria to help both researchers and practitioners make decisions when training without labeled data.