 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Visual Composition through Improved Semantic Guidance
Dec 19, 2024



Visual imagery does not consist of solitary objects, but instead reflects the composition of a multitude of fluid concepts. While there have been great advances in visual representation learning, such advances have focused on building better representations for a small number of discrete objects bereft of an understanding of how these objects are interacting. One can observe this limitation in representations learned through captions or contrastive learning -- where the learned model treats an image essentially as a bag of words. Several works have attempted to address this limitation through the development of bespoke learned architectures to directly address the shortcomings in compositional learning. In this work, we focus on simple, and scalable approaches. In particular, we demonstrate that by substantially improving weakly labeled data, i.e. captions, we can vastly improve the performance of standard contrastive learning approaches. Previous CLIP models achieved near chance rate on challenging tasks probing compositional learning. However, our simple approach boosts performance of CLIP substantially and surpasses all bespoke architectures. Furthermore, we showcase our results on a relatively new captioning benchmark derived from DOCCI. We demonstrate through a series of ablations that a standard CLIP model trained with enhanced data may demonstrate impressive performance on image retrieval tasks.
Towards flexible perception with visual memory
Aug 15, 2024



Training a neural network is a monolithic endeavor, akin to carving knowledge into stone: once the process is completed, editing the knowledge in a network is nearly impossible, since all information is distributed across the network's weights. We here explore a simple, compelling alternative by marrying the representational power of deep neural networks with the flexibility of a database. Decomposing the task of image classification into image similarity (from a pre-trained embedding) and search (via fast nearest neighbor retrieval from a knowledge database), we build a simple and flexible visual memory that has the following key capabilities: (1.) The ability to flexibly add data across scales: from individual samples all the way to entire classes and billion-scale data; (2.) The ability to remove data through unlearning and memory pruning; (3.) An interpretable decision-mechanism on which we can intervene to control its behavior. Taken together, these capabilities comprehensively demonstrate the benefits of an explicit visual memory. We hope that it might contribute to a conversation on how knowledge should be represented in deep vision models -- beyond carving it in ``stone'' weights.
Capabilities of Gemini Models in Medicine
May 01, 2024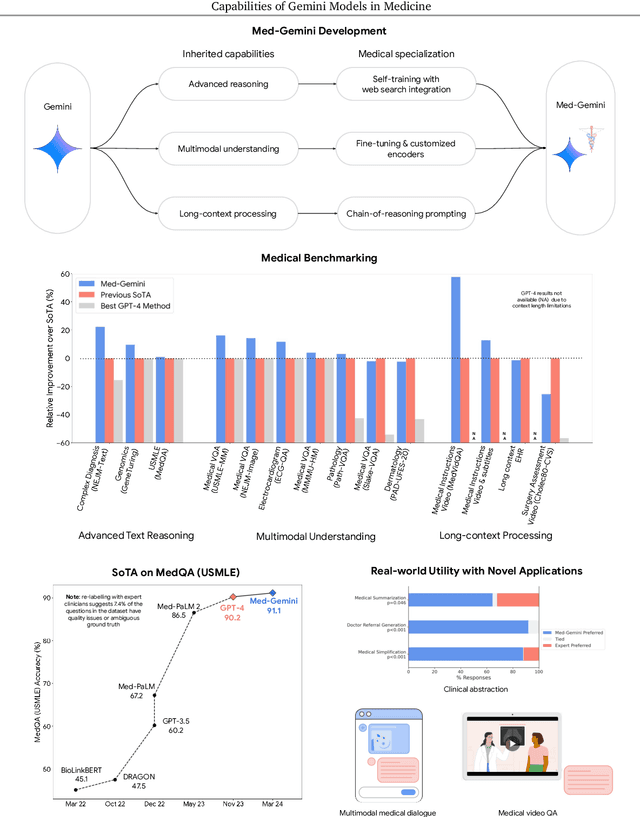
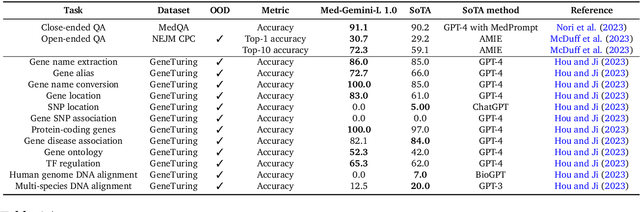
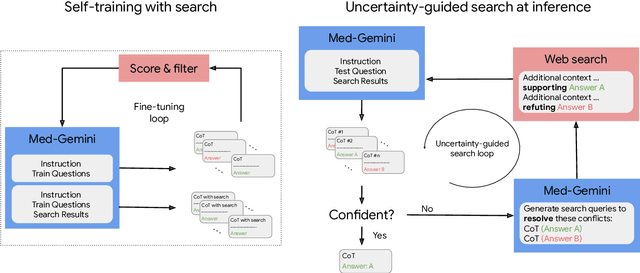
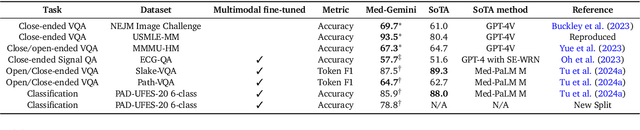
Excellence in a wide variety of medical applications poses considerable challenges for AI, requiring advanced reasoning, access to up-to-date medical knowledge and understanding of complex multimodal data. Gemini models, with strong general capabilities in multimodal and long-context reasoning, offer exciting possibilities in medicine. Building on these core strengths of Gemini, we introduce Med-Gemini, a family of highly capable multimodal models that are specialized in medicine with the ability to seamlessly use web search, and that can be efficiently tailored to novel modalities using custom encoders. We evaluate Med-Gemini on 14 medical benchmarks, establishing new state-of-the-art (SoTA) performance on 10 of them, and surpass the GPT-4 model family on every benchmark where a direct comparison is viable, often by a wide margin. On the popular MedQA (USMLE) benchmark, our best-performing Med-Gemini model achieves SoTA performance of 91.1% accuracy, using a novel uncertainty-guided search strategy. On 7 multimodal benchmarks including NEJM Image Challenges and MMMU (health & medicine), Med-Gemini improves over GPT-4V by an average relative margin of 44.5%. We demonstrate the effectiveness of Med-Gemini's long-context capabilities through SoTA performance on a needle-in-a-haystack retrieval task from long de-identified health records and medical video question answering, surpassing prior bespoke methods using only in-context learning. Finally, Med-Gemini's performance suggests real-world utility by surpassing human experts on tasks such as medical text summarization, alongside demonstrations of promising potential for multimodal medical dialogue, medical research and education. Taken together, our results offer compelling evidence for Med-Gemini's potential, although further rigorous evaluation will be crucial before real-world deployment in this safety-critical domain.
On Robustness in Multimodal Learning
Apr 11, 2023Multimodal learning is defined as learning over multiple heterogeneous input modalities such as video, audio, and text. In this work, we are concerned with understanding how models behave as the type of modalities differ between training and deployment, a situation that naturally arises in many applications of multimodal learning to hardware platforms. We present a multimodal robustness framework to provide a systematic analysis of common multimodal representation learning methods. Further, we identify robustness short-comings of these approaches and propose two intervention techniques leading to $1.5\times$-$4\times$ robustness improvements on three datasets, AudioSet, Kinetics-400 and ImageNet-Captions. Finally, we demonstrate that these interventions better utilize additional modalities, if present, to achieve competitive results of $44.2$ mAP on AudioSet 20K.
STAIR: Learning Sparse Text and Image Representation in Grounded Tokens
Feb 08, 2023Image and text retrieval is one of the foundational tasks in the vision and language domain with multiple real-world applications. State-of-the-art approaches, e.g. CLIP, ALIGN, represent images and texts as dense embeddings and calculate the similarity in the dense embedding space as the matching score. On the other hand, sparse semantic features like bag-of-words models are more interpretable, but believed to suffer from inferior accuracy than dense representations. In this work, we show that it is possible to build a sparse semantic representation that is as powerful as, or even better than, dense presentations. We extend the CLIP model and build a sparse text and image representation (STAIR), where the image and text are mapped to a sparse token space. Each token in the space is a (sub-)word in the vocabulary, which is not only interpretable but also easy to integrate with existing information retrieval systems. STAIR model significantly outperforms a CLIP model with +$4.9\%$ and +$4.3\%$ absolute Recall@1 improvement on COCO-5k text$\rightarrow$image and image$\rightarrow$text retrieval respectively. It also achieved better performance on both of ImageNet zero-shot and linear probing compared to CLIP.
PseudoAugment: Learning to Use Unlabeled Data for Data Augmentation in Point Clouds
Oct 24, 2022Data augmentation is an important technique to improve data efficiency and save labeling cost for 3D detection in point clouds. Yet, existing augmentation policies have so far been designed to only utilize labeled data, which limits the data diversity. In this paper, we recognize that pseudo labeling and data augmentation are complementary, thus propose to leverage unlabeled data for data augmentation to enrich the training data. In particular, we design three novel pseudo-label based data augmentation policies (PseudoAugments) to fuse both labeled and pseudo-labeled scenes, including frames (PseudoFrame), objecta (PseudoBBox), and background (PseudoBackground). PseudoAugments outperforms pseudo labeling by mitigating pseudo labeling errors and generating diverse fused training scenes. We demonstrate PseudoAugments generalize across point-based and voxel-based architectures, different model capacity and both KITTI and Waymo Open Dataset. To alleviate the cost of hyperparameter tuning and iterative pseudo labeling, we develop a population-based data augmentation framework for 3D detection, named AutoPseudoAugment. Unlike previous works that perform pseudo-labeling offline, our framework performs PseudoAugments and hyperparameter tuning in one shot to reduce computational cost. Experimental results on the large-scale Waymo Open Dataset show our method outperforms state-of-the-art auto data augmentation method (PPBA) and self-training method (pseudo labeling). In particular, AutoPseudoAugment is about 3X and 2X data efficient on vehicle and pedestrian tasks compared to prior arts. Notably, AutoPseudoAugment nearly matches the full dataset training results, with just 10% of the labeled run segments on the vehicle detection task.
Perceptual Grouping in Vision-Language Models
Oct 18, 2022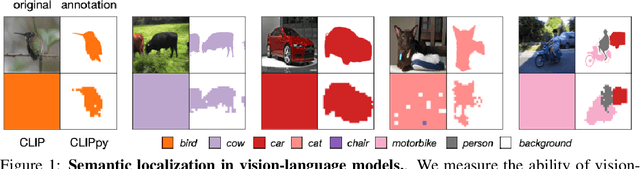
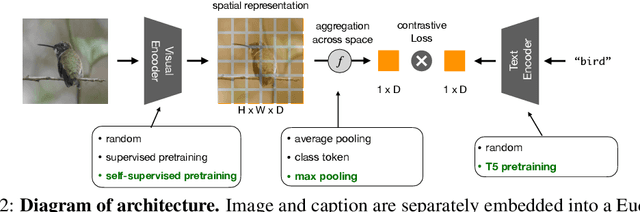
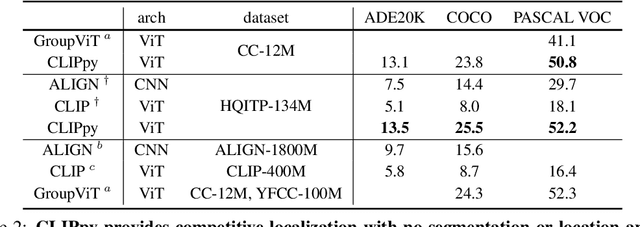
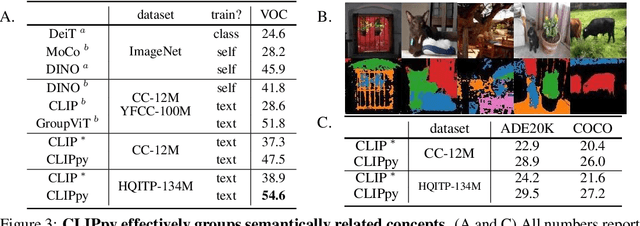
Recent advances in zero-shot image recognition suggest that vision-language models learn generic visual representations with a high degree of semantic information that may be arbitrarily probed with natural language phrases. Understanding an image, however, is not just about understanding what content resides within an image, but importantly, where that content resides. In this work we examine how well vision-language models are able to understand where objects reside within an image and group together visually related parts of the imagery. We demonstrate how contemporary vision and language representation learning models based on contrastive losses and large web-based data capture limited object localization information. We propose a minimal set of modifications that results in models that uniquely learn both semantic and spatial information. We measure this performance in terms of zero-shot image recognition, unsupervised bottom-up and top-down semantic segmentations, as well as robustness analyses. We find that the resulting model achieves state-of-the-art results in terms of unsupervised segmentation, and demonstrate that the learned representations are uniquely robust to spurious correlations in datasets designed to probe the causal behavior of vision models.
Soft Calibration Objectives for Neural Networks
Jul 30, 2021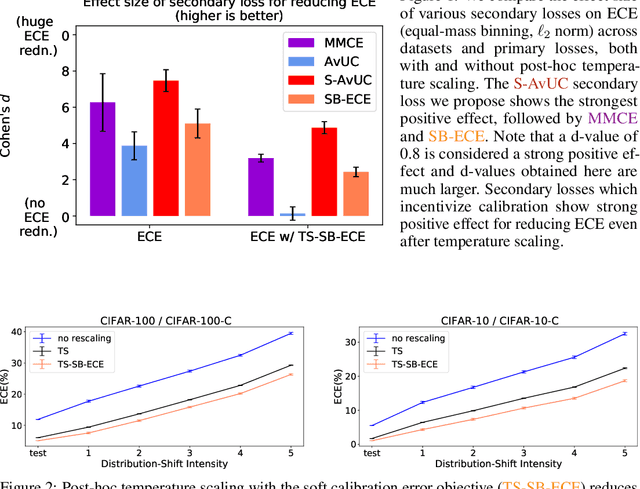
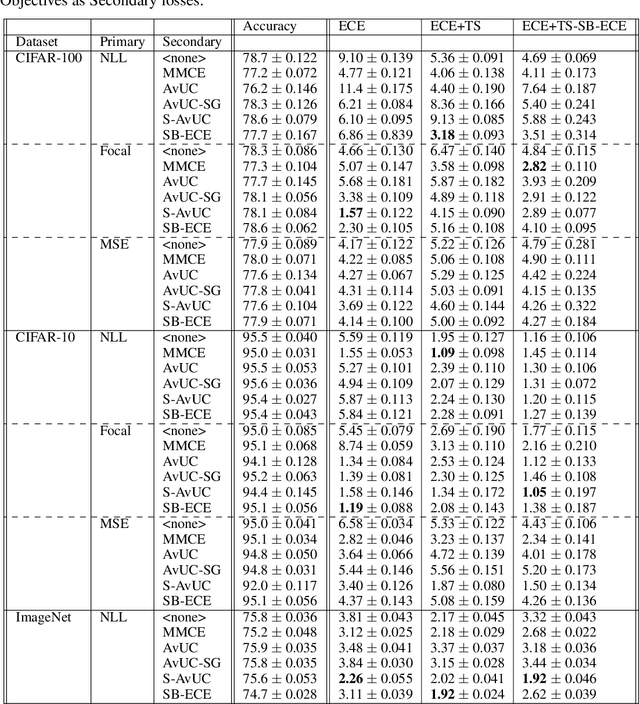
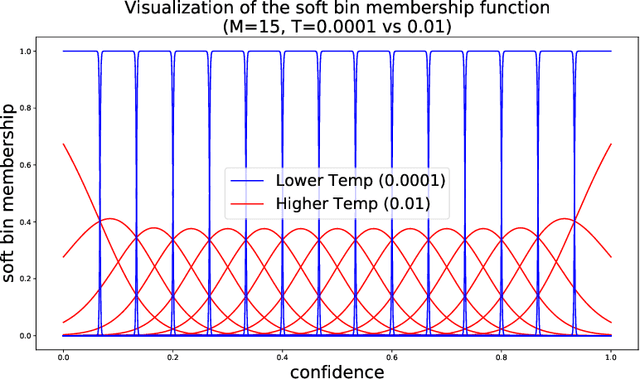
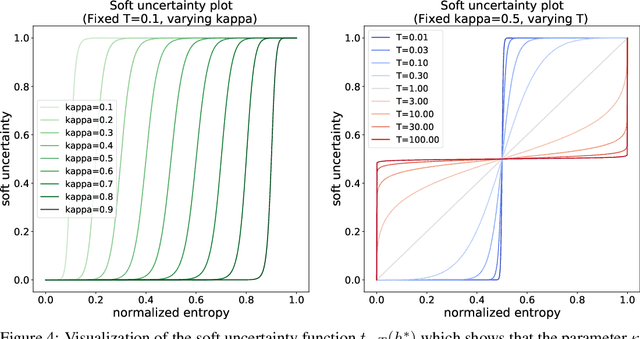
Optimal decision making requires that classifiers produce uncertainty estimates consistent with their empirical accuracy. However, deep neural networks are often under- or over-confident in their predictions. Consequently, methods have been developed to improve the calibration of their predictive uncertainty both during training and post-hoc. In this work, we propose differentiable losses to improve calibration based on a soft (continuous) version of the binning operation underlying popular calibration-error estimators. When incorporated into training, these soft calibration losses achieve state-of-the-art single-model ECE across multiple datasets with less than 1% decrease in accuracy. For instance, we observe an 82% reduction in ECE (70% relative to the post-hoc rescaled ECE) in exchange for a 0.7% relative decrease in accuracy relative to the cross entropy baseline on CIFAR-100. When incorporated post-training, the soft-binning-based calibration error objective improves upon temperature scaling, a popular recalibration method. Overall, experiments across losses and datasets demonstrate that using calibration-sensitive procedures yield better uncertainty estimates under dataset shift than the standard practice of using a cross entropy loss and post-hoc recalibration methods.
Scene Transformer: A unified multi-task model for behavior prediction and planning
Jun 15, 2021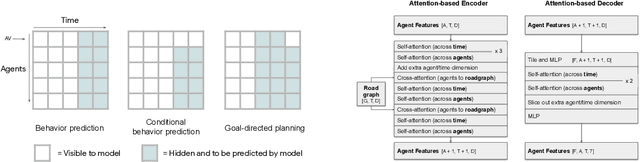
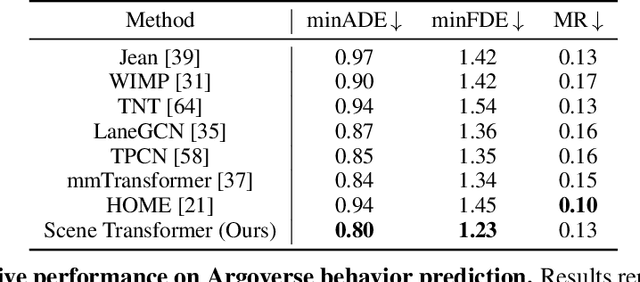
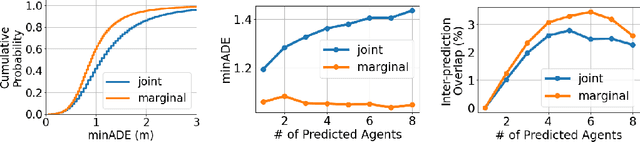
Predicting the future motion of multiple agents is necessary for planning in dynamic environments. This task is challenging for autonomous driving since agents (e.g., vehicles and pedestrians) and their associated behaviors may be diverse and influence each other. Most prior work has focused on first predicting independent futures for each agent based on all past motion, and then planning against these independent predictions. However, planning against fixed predictions can suffer from the inability to represent the future interaction possibilities between different agents, leading to sub-optimal planning. In this work, we formulate a model for predicting the behavior of all agents jointly in real-world driving environments in a unified manner. Inspired by recent language modeling approaches, we use a masking strategy as the query to our model, enabling one to invoke a single model to predict agent behavior in many ways, such as potentially conditioned on the goal or full future trajectory of the autonomous vehicle or the behavior of other agents in the environment. Our model architecture fuses heterogeneous world state in a unified Transformer architecture by employing attention across road elements, agent interactions and time steps. We evaluate our approach on autonomous driving datasets for behavior prediction, and achieve state-of-the-art performance. Our work demonstrates that formulating the problem of behavior prediction in a unified architecture with a masking strategy may allow us to have a single model that can perform multiple motion prediction and planning related tasks effectively.
Large Scale Interactive Motion Forecasting for Autonomous Driving : The Waymo Open Motion Dataset
Apr 20, 2021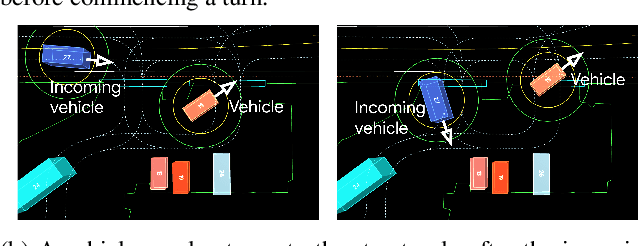
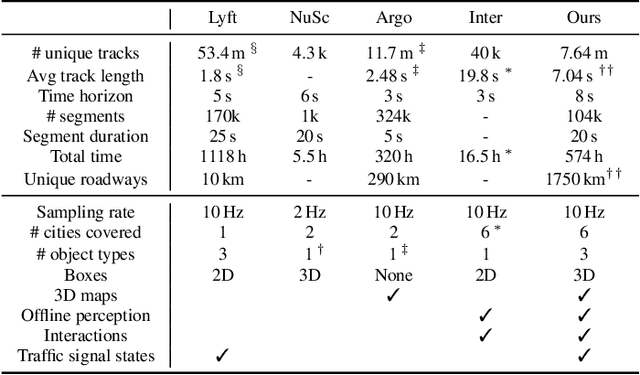
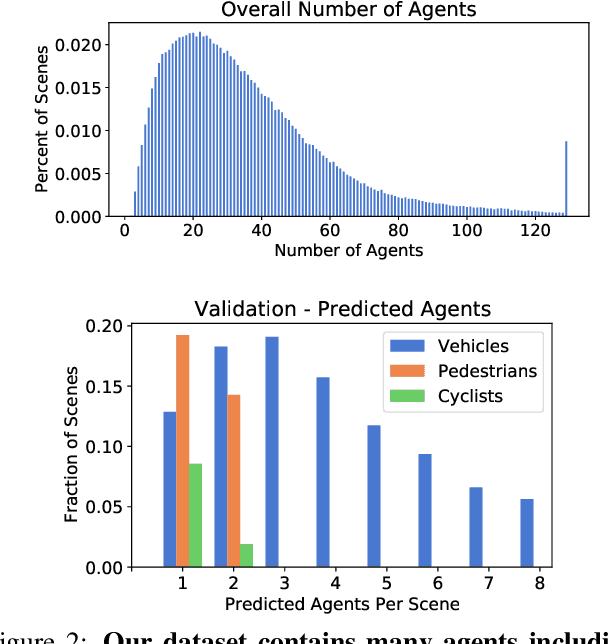
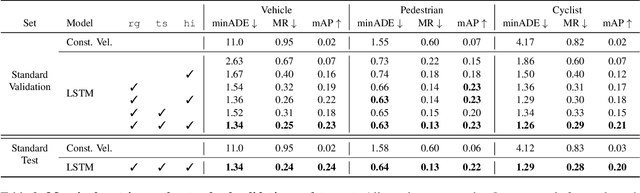
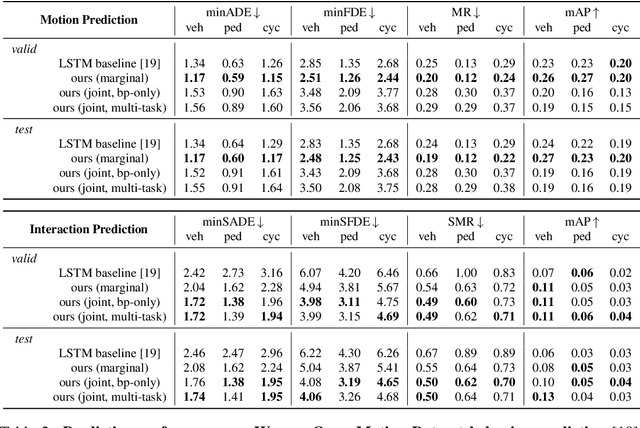
As autonomous driving systems mature, motion forecasting has received increasing attention as a critical requirement for planning. Of particular importance are interactive situations such as merges, unprotected turns, etc., where predicting individual object motion is not sufficient. Joint predictions of multiple objects are required for effective route planning. There has been a critical need for high-quality motion data that is rich in both interactions and annotation to develop motion planning models. In this work, we introduce the most diverse interactive motion dataset to our knowledge, and provide specific labels for interacting objects suitable for developing joint prediction models. With over 100,000 scenes, each 20 seconds long at 10 Hz, our new dataset contains more than 570 hours of unique data over 1750 km of roadways. It was collected by mining for interesting interactions between vehicles, pedestrians, and cyclists across six cities within the United States. We use a high-accuracy 3D auto-labeling system to generate high quality 3D bounding boxes for each road agent, and provide corresponding high definition 3D maps for each scene. Furthermore, we introduce a new set of metrics that provides a comprehensive evaluation of both single agent and joint agent interaction motion forecasting models. Finally, we provide strong baseline models for individual-agent prediction and joint-prediction. We hope that this new large-scale interactive motion dataset will provide new opportunities for advancing motion forecasting models.