 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContext Sensitivity Improves Human-Machine Visual Alignment
Apr 15, 2026Modern machine learning models typically represent inputs as fixed points in a high-dimensional embedding space. While this approach has been proven powerful for a wide range of downstream tasks, it fundamentally differs from the way humans process information. Because humans are constantly adapting to their environment, they represent objects and their relationships in a highly context-sensitive manner. To address this gap, we propose a method for context-sensitive similarity computation from neural network embeddings, applied to modeling a triplet odd-one-out task with an anchor image serving as simultaneous context. Modeling context enables us to achieve up to a 15% improvement in odd-one-out accuracy over a context-insensitive model. We find that this improvement is consistent across both original and "human-aligned" vision foundation models.
Is your algorithm unlearning or untraining?
Apr 09, 2026As models are getting larger and are trained on increasing amounts of data, there has been an explosion of interest into how we can ``delete'' specific data points or behaviours from a trained model, after the fact. This goal has been referred to as ``machine unlearning''. In this note, we argue that the term ``unlearning'' has been overloaded, with different research efforts spanning two distinct problem formulations, but without that distinction having been observed or acknowledged in the literature. This causes various issues, including ambiguity around when an algorithm is expected to work, use of inappropriate metrics and baselines when comparing different algorithms to one another, difficulty in interpreting results, as well as missed opportunities for pursuing critical research directions. In this note, we address this issue by establishing a fundamental distinction between two notions that we identify as \unlearning and \untraining, illustrated in Figure 1. In short, \untraining aims to reverse the effect of having trained on a given forget set, i.e. to remove the influence that that specific forget set examples had on the model during training. On the other hand, the goal of \unlearning is not just to remove the influence of those given examples, but to use those examples for the purpose of more broadly removing the entire underlying distribution from which those examples were sampled (e.g. the concept or behaviour that those examples represent). We discuss technical definitions of these problems and map problem settings studied in the literature to each. We hope to initiate discussions on disambiguating technical definitions and identify a set of overlooked research questions, as we believe that this a key missing step for accelerating progress in the field of ``unlearning''.
Analysis of Optimality of Large Language Models on Planning Problems
Apr 03, 2026Classic AI planning problems have been revisited in the Large Language Model (LLM) era, with a focus of recent benchmarks on success rates rather than plan efficiency. We examine the degree to which frontier models reason optimally versus relying on simple, heuristic, and possibly inefficient strategies. We focus on the Blocksworld domain involving towers of labeled blocks which have to be moved from an initial to a goal configuration via a set of primitive actions. We also study a formally equivalent task, the generalized Path-Star ($P^*$) graph, in order to isolate true topological reasoning from semantic priors. We systematically manipulate problem depth (the height of block towers), width (the number of towers), and compositionality (the number of goal blocks). Reasoning-enhanced LLMs significantly outperform traditional satisficing planners (e.g., LAMA) in complex, multi-goal configurations. Although classical search algorithms hit a wall as the search space expands, LLMs track theoretical optimality limits with near-perfect precision, even when domain-specific semantic hints are stripped away. To explain these surprising findings, we consider (and find evidence to support) two hypotheses: an active Algorithmic Simulation executed via reasoning tokens and a Geometric Memory that allows models to represent the $P^*$ topology as a navigable global geometry, effectively bypassing exponential combinatorial complexity.
Aligning Machine and Human Visual Representations across Abstraction Levels
Sep 10, 2024



Deep neural networks have achieved success across a wide range of applications, including as models of human behavior in vision tasks. However, neural network training and human learning differ in fundamental ways, and neural networks often fail to generalize as robustly as humans do, raising questions regarding the similarity of their underlying representations. What is missing for modern learning systems to exhibit more human-like behavior? We highlight a key misalignment between vision models and humans: whereas human conceptual knowledge is hierarchically organized from fine- to coarse-scale distinctions, model representations do not accurately capture all these levels of abstraction. To address this misalignment, we first train a teacher model to imitate human judgments, then transfer human-like structure from its representations into pretrained state-of-the-art vision foundation models. These human-aligned models more accurately approximate human behavior and uncertainty across a wide range of similarity tasks, including a new dataset of human judgments spanning multiple levels of semantic abstractions. They also perform better on a diverse set of machine learning tasks, increasing generalization and out-of-distribution robustness. Thus, infusing neural networks with additional human knowledge yields a best-of-both-worlds representation that is both more consistent with human cognition and more practically useful, thus paving the way toward more robust, interpretable, and human-like artificial intelligence systems.
Reawakening knowledge: Anticipatory recovery from catastrophic interference via structured training
Mar 14, 2024



We explore the training dynamics of neural networks in a structured non-IID setting where documents are presented cyclically in a fixed, repeated sequence. Typically, networks suffer from catastrophic interference when training on a sequence of documents; however, we discover a curious and remarkable property of LLMs fine-tuned sequentially in this setting: they exhibit anticipatory behavior, recovering from the forgetting on documents before encountering them again. The behavior emerges and becomes more robust as the architecture scales up its number of parameters. Through comprehensive experiments and visualizations, we uncover new insights into training over-parameterized networks in structured environments.
On the Foundations of Shortcut Learning
Oct 24, 2023



Deep-learning models can extract a rich assortment of features from data. Which features a model uses depends not only on predictivity-how reliably a feature indicates train-set labels-but also on availability-how easily the feature can be extracted, or leveraged, from inputs. The literature on shortcut learning has noted examples in which models privilege one feature over another, for example texture over shape and image backgrounds over foreground objects. Here, we test hypotheses about which input properties are more available to a model, and systematically study how predictivity and availability interact to shape models' feature use. We construct a minimal, explicit generative framework for synthesizing classification datasets with two latent features that vary in predictivity and in factors we hypothesize to relate to availability, and quantify a model's shortcut bias-its over-reliance on the shortcut (more available, less predictive) feature at the expense of the core (less available, more predictive) feature. We find that linear models are relatively unbiased, but introducing a single hidden layer with ReLU or Tanh units yields a bias. Our empirical findings are consistent with a theoretical account based on Neural Tangent Kernels. Finally, we study how models used in practice trade off predictivity and availability in naturalistic datasets, discovering availability manipulations which increase models' degree of shortcut bias. Taken together, these findings suggest that the propensity to learn shortcut features is a fundamental characteristic of deep nonlinear architectures warranting systematic study given its role in shaping how models solve tasks.
Can Neural Network Memorization Be Localized?
Jul 18, 2023



Recent efforts at explaining the interplay of memorization and generalization in deep overparametrized networks have posited that neural networks $\textit{memorize}$ "hard" examples in the final few layers of the model. Memorization refers to the ability to correctly predict on $\textit{atypical}$ examples of the training set. In this work, we show that rather than being confined to individual layers, memorization is a phenomenon confined to a small set of neurons in various layers of the model. First, via three experimental sources of converging evidence, we find that most layers are redundant for the memorization of examples and the layers that contribute to example memorization are, in general, not the final layers. The three sources are $\textit{gradient accounting}$ (measuring the contribution to the gradient norms from memorized and clean examples), $\textit{layer rewinding}$ (replacing specific model weights of a converged model with previous training checkpoints), and $\textit{retraining}$ (training rewound layers only on clean examples). Second, we ask a more generic question: can memorization be localized $\textit{anywhere}$ in a model? We discover that memorization is often confined to a small number of neurons or channels (around 5) of the model. Based on these insights we propose a new form of dropout -- $\textit{example-tied dropout}$ that enables us to direct the memorization of examples to an apriori determined set of neurons. By dropping out these neurons, we are able to reduce the accuracy on memorized examples from $100\%\to3\%$, while also reducing the generalization gap.
Spotlight Attention: Robust Object-Centric Learning With a Spatial Locality Prior
May 31, 2023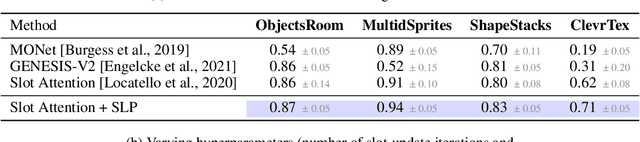
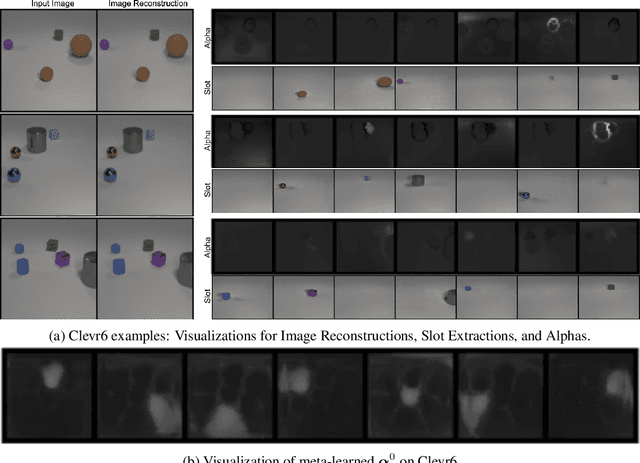

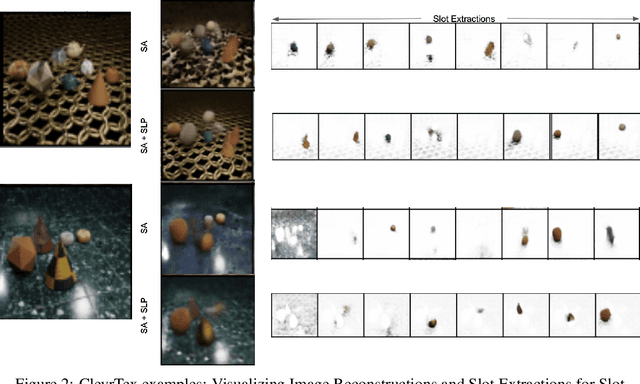
The aim of object-centric vision is to construct an explicit representation of the objects in a scene. This representation is obtained via a set of interchangeable modules called \emph{slots} or \emph{object files} that compete for local patches of an image. The competition has a weak inductive bias to preserve spatial continuity; consequently, one slot may claim patches scattered diffusely throughout the image. In contrast, the inductive bias of human vision is strong, to the degree that attention has classically been described with a spotlight metaphor. We incorporate a spatial-locality prior into state-of-the-art object-centric vision models and obtain significant improvements in segmenting objects in both synthetic and real-world datasets. Similar to human visual attention, the combination of image content and spatial constraints yield robust unsupervised object-centric learning, including less sensitivity to model hyperparameters.
Layer-Stack Temperature Scaling
Nov 18, 2022



Recent works demonstrate that early layers in a neural network contain useful information for prediction. Inspired by this, we show that extending temperature scaling across all layers improves both calibration and accuracy. We call this procedure "layer-stack temperature scaling" (LATES). Informally, LATES grants each layer a weighted vote during inference. We evaluate it on five popular convolutional neural network architectures both in- and out-of-distribution and observe a consistent improvement over temperature scaling in terms of accuracy, calibration, and AUC. All conclusions are supported by comprehensive statistical analyses. Since LATES neither retrains the architecture nor introduces many more parameters, its advantages can be reaped without requiring additional data beyond what is used in temperature scaling. Finally, we show that combining LATES with Monte Carlo Dropout matches state-of-the-art results on CIFAR10/100.
An Empirical Study on Clustering Pretrained Embeddings: Is Deep Strictly Better?
Nov 09, 2022Recent research in clustering face embeddings has found that unsupervised, shallow, heuristic-based methods -- including $k$-means and hierarchical agglomerative clustering -- underperform supervised, deep, inductive methods. While the reported improvements are indeed impressive, experiments are mostly limited to face datasets, where the clustered embeddings are highly discriminative or well-separated by class (Recall@1 above 90% and often nearing ceiling), and the experimental methodology seemingly favors the deep methods. We conduct a large-scale empirical study of 17 clustering methods across three datasets and obtain several robust findings. Notably, deep methods are surprisingly fragile for embeddings with more uncertainty, where they match or even perform worse than shallow, heuristic-based methods. When embeddings are highly discriminative, deep methods do outperform the baselines, consistent with past results, but the margin between methods is much smaller than previously reported. We believe our benchmarks broaden the scope of supervised clustering methods beyond the face domain and can serve as a foundation on which these methods could be improved. To enable reproducibility, we include all necessary details in the appendices, and plan to release the code.