 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneration is Required for Data-Efficient Perception
Dec 17, 2025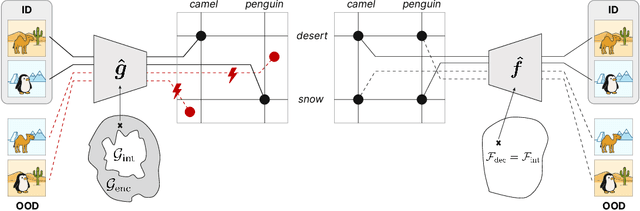
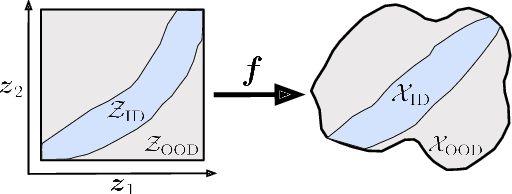
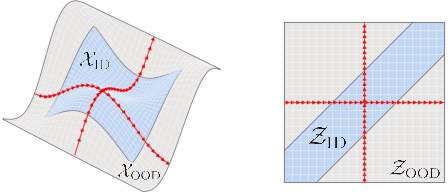
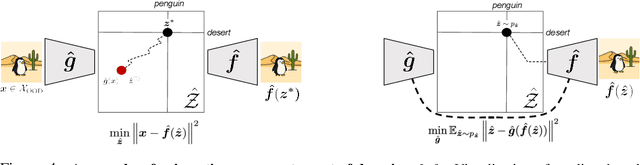
It has been hypothesized that human-level visual perception requires a generative approach in which internal representations result from inverting a decoder. Yet today's most successful vision models are non-generative, relying on an encoder that maps images to representations without decoder inversion. This raises the question of whether generation is, in fact, necessary for machines to achieve human-level visual perception. To address this, we study whether generative and non-generative methods can achieve compositional generalization, a hallmark of human perception. Under a compositional data generating process, we formalize the inductive biases required to guarantee compositional generalization in decoder-based (generative) and encoder-based (non-generative) methods. We then show theoretically that enforcing these inductive biases on encoders is generally infeasible using regularization or architectural constraints. In contrast, for generative methods, the inductive biases can be enforced straightforwardly, thereby enabling compositional generalization by constraining a decoder and inverting it. We highlight how this inversion can be performed efficiently, either online through gradient-based search or offline through generative replay. We examine the empirical implications of our theory by training a range of generative and non-generative methods on photorealistic image datasets. We find that, without the necessary inductive biases, non-generative methods often fail to generalize compositionally and require large-scale pretraining or added supervision to improve generalization. By comparison, generative methods yield significant improvements in compositional generalization, without requiring additional data, by leveraging suitable inductive biases on a decoder along with search and replay.
Evaluating Gemini Robotics Policies in a Veo World Simulator
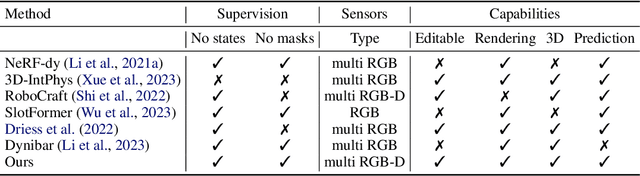
Dec 11, 2025Generative world models hold significant potential for simulating interactions with visuomotor policies in varied environments. Frontier video models can enable generation of realistic observations and environment interactions in a scalable and general manner. However, the use of video models in robotics has been limited primarily to in-distribution evaluations, i.e., scenarios that are similar to ones used to train the policy or fine-tune the base video model. In this report, we demonstrate that video models can be used for the entire spectrum of policy evaluation use cases in robotics: from assessing nominal performance to out-of-distribution (OOD) generalization, and probing physical and semantic safety. We introduce a generative evaluation system built upon a frontier video foundation model (Veo). The system is optimized to support robot action conditioning and multi-view consistency, while integrating generative image-editing and multi-view completion to synthesize realistic variations of real-world scenes along multiple axes of generalization. We demonstrate that the system preserves the base capabilities of the video model to enable accurate simulation of scenes that have been edited to include novel interaction objects, novel visual backgrounds, and novel distractor objects. This fidelity enables accurately predicting the relative performance of different policies in both nominal and OOD conditions, determining the relative impact of different axes of generalization on policy performance, and performing red teaming of policies to expose behaviors that violate physical or semantic safety constraints. We validate these capabilities through 1600+ real-world evaluations of eight Gemini Robotics policy checkpoints and five tasks for a bimanual manipulator.
Direct Motion Models for Assessing Generated Videos
Apr 30, 2025A current limitation of video generative video models is that they generate plausible looking frames, but poor motion -- an issue that is not well captured by FVD and other popular methods for evaluating generated videos. Here we go beyond FVD by developing a metric which better measures plausible object interactions and motion. Our novel approach is based on auto-encoding point tracks and yields motion features that can be used to not only compare distributions of videos (as few as one generated and one ground truth, or as many as two datasets), but also for evaluating motion of single videos. We show that using point tracks instead of pixel reconstruction or action recognition features results in a metric which is markedly more sensitive to temporal distortions in synthetic data, and can predict human evaluations of temporal consistency and realism in generated videos obtained from open-source models better than a wide range of alternatives. We also show that by using a point track representation, we can spatiotemporally localize generative video inconsistencies, providing extra interpretability of generated video errors relative to prior work. An overview of the results and link to the code can be found on the project page: http://trajan-paper.github.io.
Scaling 4D Representations
Dec 19, 2024



Scaling has not yet been convincingly demonstrated for pure self-supervised learning from video. However, prior work has focused evaluations on semantic-related tasks $\unicode{x2013}$ action classification, ImageNet classification, etc. In this paper we focus on evaluating self-supervised learning on non-semantic vision tasks that are more spatial (3D) and temporal (+1D = 4D), such as camera pose estimation, point and object tracking, and depth estimation. We show that by learning from very large video datasets, masked auto-encoding (MAE) with transformer video models actually scales, consistently improving performance on these 4D tasks, as model size increases from 20M all the way to the largest by far reported self-supervised video model $\unicode{x2013}$ 22B parameters. Rigorous apples-to-apples comparison with many recent image and video models demonstrates the benefits of scaling 4D representations.
Interaction Asymmetry: A General Principle for Learning Composable Abstractions
Nov 12, 2024Learning disentangled representations of concepts and re-composing them in unseen ways is crucial for generalizing to out-of-domain situations. However, the underlying properties of concepts that enable such disentanglement and compositional generalization remain poorly understood. In this work, we propose the principle of interaction asymmetry which states: "Parts of the same concept have more complex interactions than parts of different concepts". We formalize this via block diagonality conditions on the $(n+1)$th order derivatives of the generator mapping concepts to observed data, where different orders of "complexity" correspond to different $n$. Using this formalism, we prove that interaction asymmetry enables both disentanglement and compositional generalization. Our results unify recent theoretical results for learning concepts of objects, which we show are recovered as special cases with $n\!=\!0$ or $1$. We provide results for up to $n\!=\!2$, thus extending these prior works to more flexible generator functions, and conjecture that the same proof strategies generalize to larger $n$. Practically, our theory suggests that, to disentangle concepts, an autoencoder should penalize its latent capacity and the interactions between concepts during decoding. We propose an implementation of these criteria using a flexible Transformer-based VAE, with a novel regularizer on the attention weights of the decoder. On synthetic image datasets consisting of objects, we provide evidence that this model can achieve comparable object disentanglement to existing models that use more explicit object-centric priors.
Moving Off-the-Grid: Scene-Grounded Video Representations
Nov 08, 2024



Current vision models typically maintain a fixed correspondence between their representation structure and image space. Each layer comprises a set of tokens arranged "on-the-grid," which biases patches or tokens to encode information at a specific spatio(-temporal) location. In this work we present Moving Off-the-Grid (MooG), a self-supervised video representation model that offers an alternative approach, allowing tokens to move "off-the-grid" to better enable them to represent scene elements consistently, even as they move across the image plane through time. By using a combination of cross-attention and positional embeddings we disentangle the representation structure and image structure. We find that a simple self-supervised objective--next frame prediction--trained on video data, results in a set of latent tokens which bind to specific scene structures and track them as they move. We demonstrate the usefulness of MooG's learned representation both qualitatively and quantitatively by training readouts on top of the learned representation on a variety of downstream tasks. We show that MooG can provide a strong foundation for different vision tasks when compared to "on-the-grid" baselines.
Neural Assets: 3D-Aware Multi-Object Scene Synthesis with Image Diffusion Models
Jun 13, 2024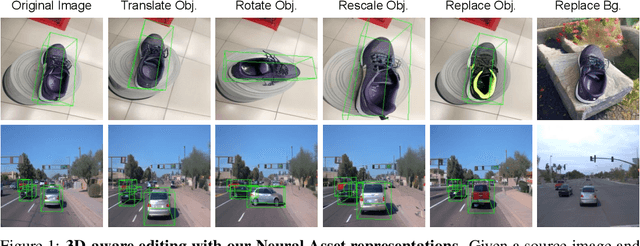
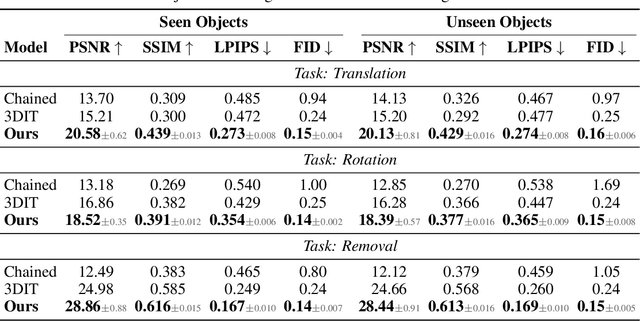

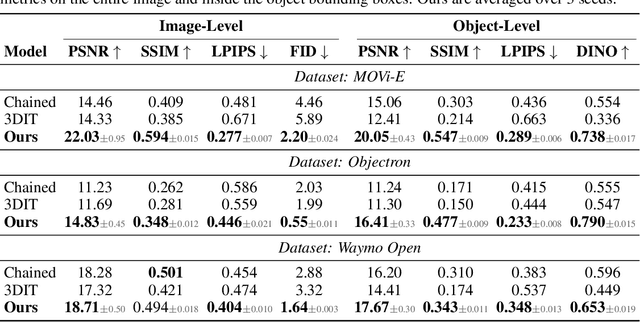
We address the problem of multi-object 3D pose control in image diffusion models. Instead of conditioning on a sequence of text tokens, we propose to use a set of per-object representations, Neural Assets, to control the 3D pose of individual objects in a scene. Neural Assets are obtained by pooling visual representations of objects from a reference image, such as a frame in a video, and are trained to reconstruct the respective objects in a different image, e.g., a later frame in the video. Importantly, we encode object visuals from the reference image while conditioning on object poses from the target frame. This enables learning disentangled appearance and pose features. Combining visual and 3D pose representations in a sequence-of-tokens format allows us to keep the text-to-image architecture of existing models, with Neural Assets in place of text tokens. By fine-tuning a pre-trained text-to-image diffusion model with this information, our approach enables fine-grained 3D pose and placement control of individual objects in a scene. We further demonstrate that Neural Assets can be transferred and recomposed across different scenes. Our model achieves state-of-the-art multi-object editing results on both synthetic 3D scene datasets, as well as two real-world video datasets (Objectron, Waymo Open).
SceneCraft: An LLM Agent for Synthesizing 3D Scene as Blender Code
Mar 02, 2024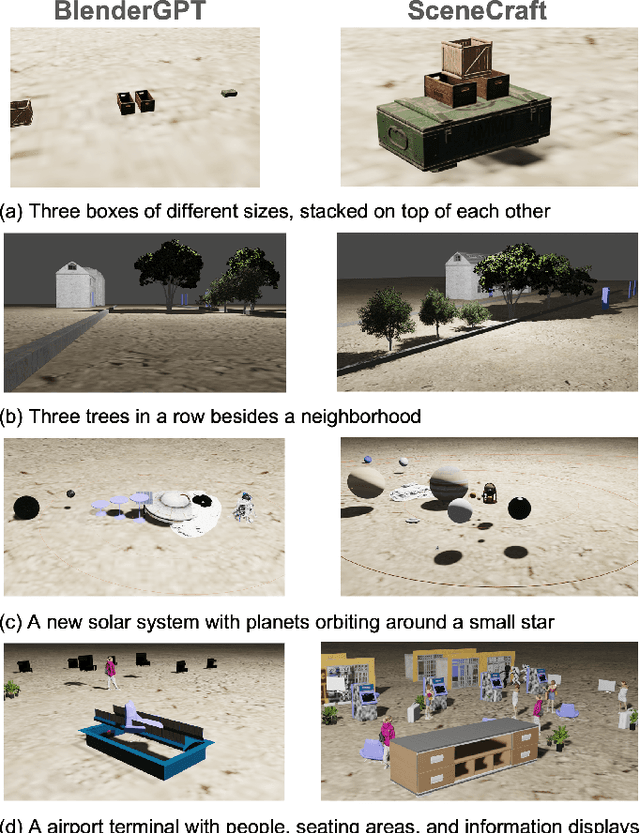
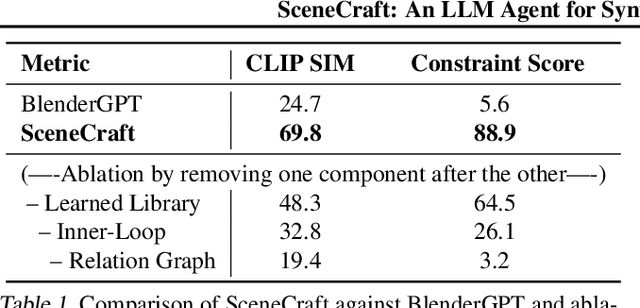
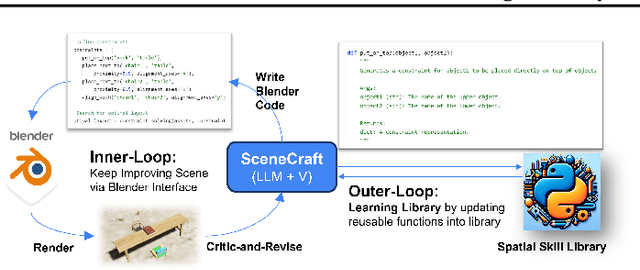
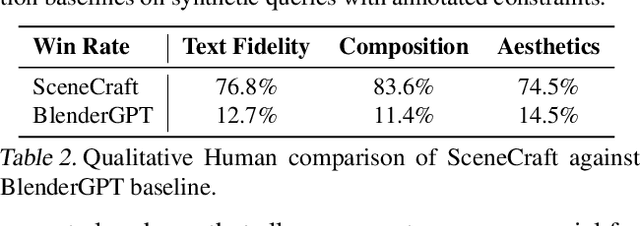
This paper introduces SceneCraft, a Large Language Model (LLM) Agent converting text descriptions into Blender-executable Python scripts which render complex scenes with up to a hundred 3D assets. This process requires complex spatial planning and arrangement. We tackle these challenges through a combination of advanced abstraction, strategic planning, and library learning. SceneCraft first models a scene graph as a blueprint, detailing the spatial relationships among assets in the scene. SceneCraft then writes Python scripts based on this graph, translating relationships into numerical constraints for asset layout. Next, SceneCraft leverages the perceptual strengths of vision-language foundation models like GPT-V to analyze rendered images and iteratively refine the scene. On top of this process, SceneCraft features a library learning mechanism that compiles common script functions into a reusable library, facilitating continuous self-improvement without expensive LLM parameter tuning. Our evaluation demonstrates that SceneCraft surpasses existing LLM-based agents in rendering complex scenes, as shown by its adherence to constraints and favorable human assessments. We also showcase the broader application potential of SceneCraft by reconstructing detailed 3D scenes from the Sintel movie and guiding a video generative model with generated scenes as intermediary control signal.
Learning 3D Particle-based Simulators from RGB-D Videos
Dec 08, 2023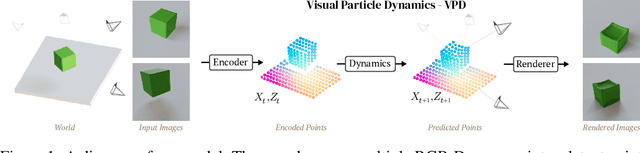
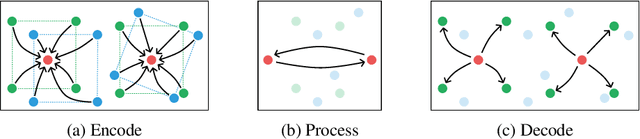
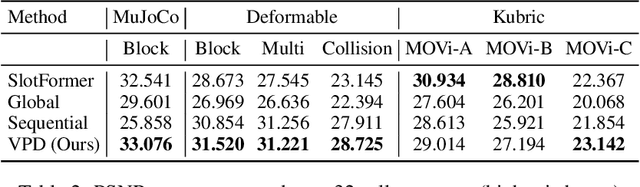
Realistic simulation is critical for applications ranging from robotics to animation. Traditional analytic simulators sometimes struggle to capture sufficiently realistic simulation which can lead to problems including the well known "sim-to-real" gap in robotics. Learned simulators have emerged as an alternative for better capturing real-world physical dynamics, but require access to privileged ground truth physics information such as precise object geometry or particle tracks. Here we propose a method for learning simulators directly from observations. Visual Particle Dynamics (VPD) jointly learns a latent particle-based representation of 3D scenes, a neural simulator of the latent particle dynamics, and a renderer that can produce images of the scene from arbitrary views. VPD learns end to end from posed RGB-D videos and does not require access to privileged information. Unlike existing 2D video prediction models, we show that VPD's 3D structure enables scene editing and long-term predictions. These results pave the way for downstream applications ranging from video editing to robotic planning.
DyST: Towards Dynamic Neural Scene Representations on Real-World Videos
Oct 09, 2023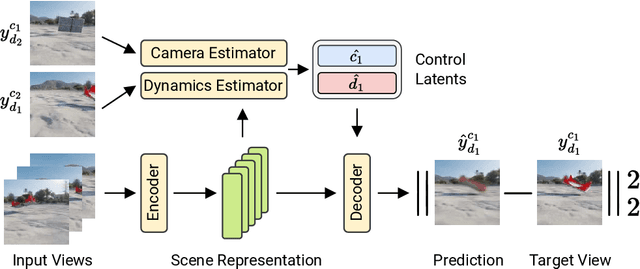
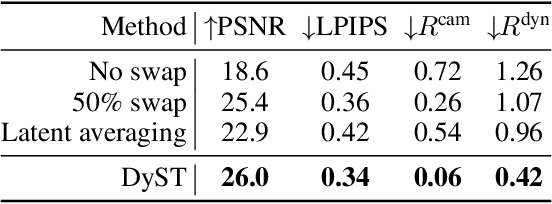
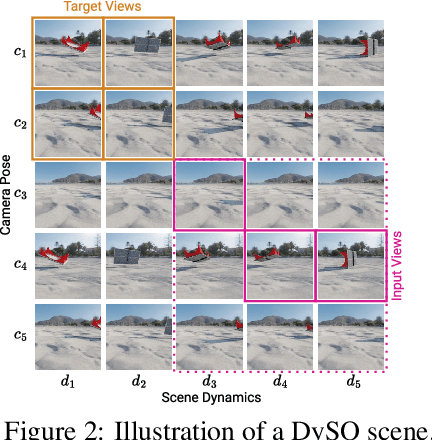
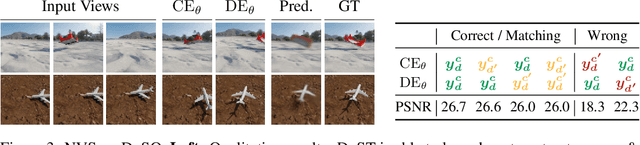
Visual understanding of the world goes beyond the semantics and flat structure of individual images. In this work, we aim to capture both the 3D structure and dynamics of real-world scenes from monocular real-world videos. Our Dynamic Scene Transformer (DyST) model leverages recent work in neural scene representation to learn a latent decomposition of monocular real-world videos into scene content, per-view scene dynamics, and camera pose. This separation is achieved through a novel co-training scheme on monocular videos and our new synthetic dataset DySO. DyST learns tangible latent representations for dynamic scenes that enable view generation with separate control over the camera and the content of the scene.